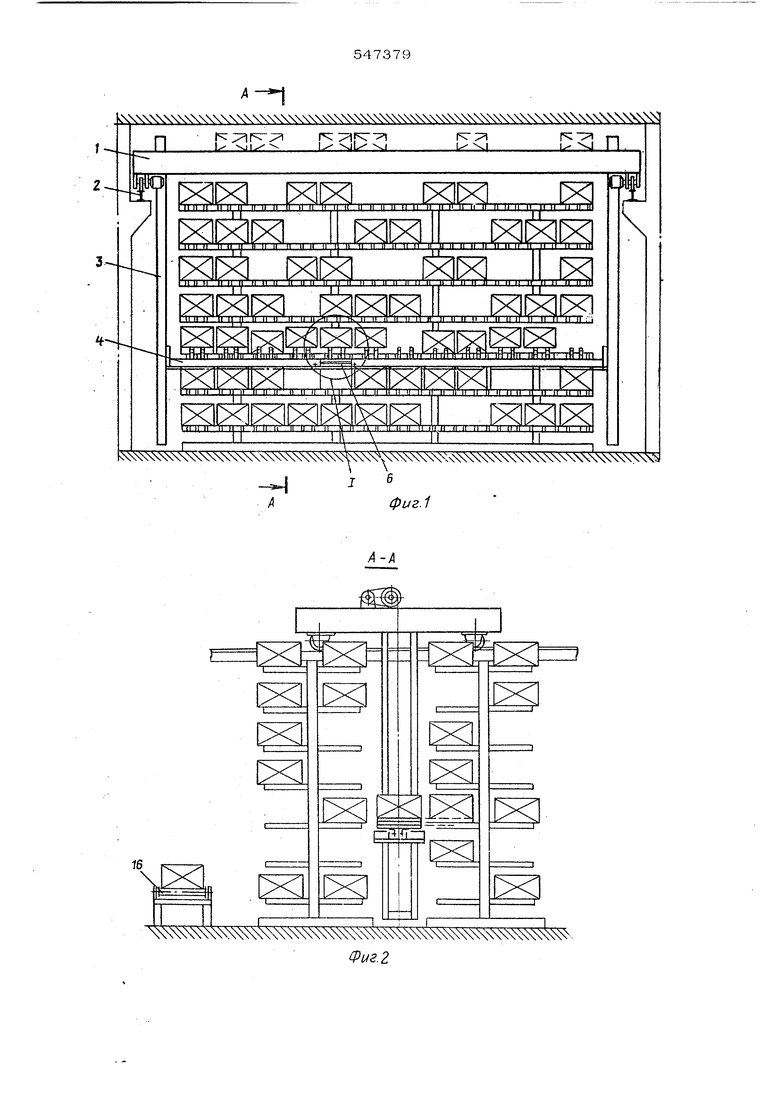
Устройство для разгрузки и загрузки стеллажей склада ыту-шыми грузами содержит металлоконструкцию с горизонтальной рамой 1, передвигающуюся по рельсовым путям 2 вдоль склада.
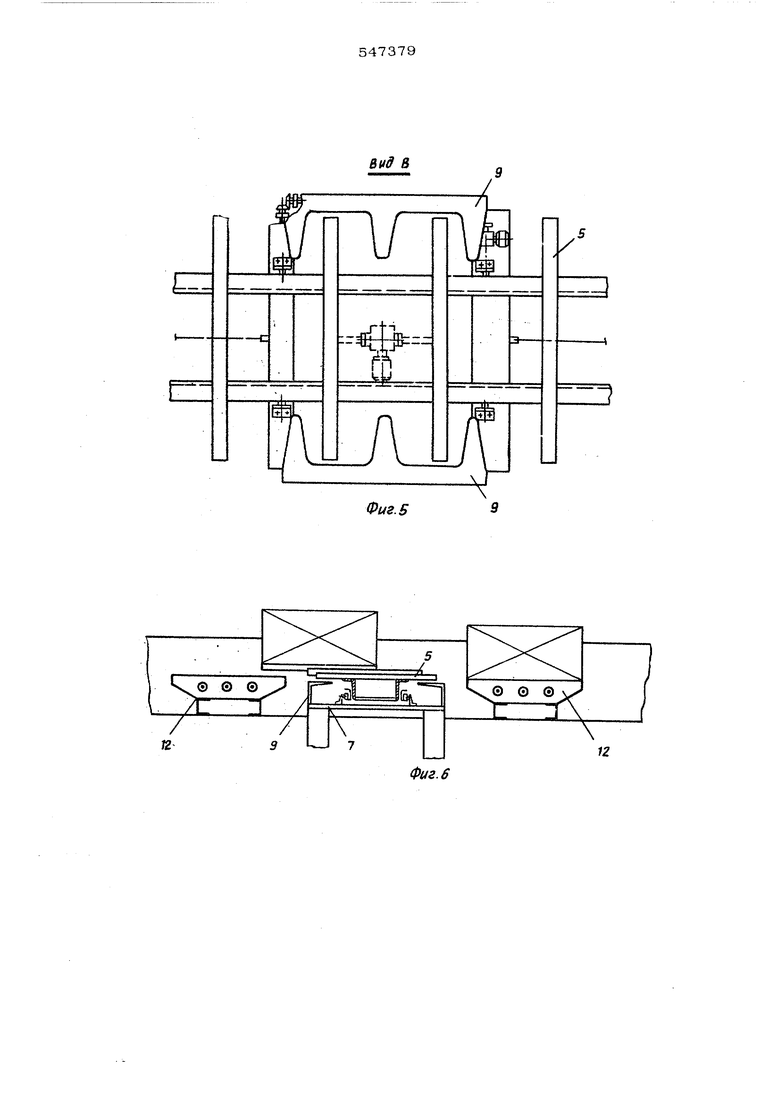
В вертикальных направляющих 3 металлоконструкции, охватывающих стеллажи с торцов, установлен подъемный i зуаовой захват, выполненный в виде балки 4, расположенной вдоль стеллажей. На балке захвата смонтированы приводные выдвижные вилы 5 которые в местах взаимодействия с грузами выдвигаются независимо от других в поперечном направлении относительно балки захвата. Грузовой захват снабжен перекладчиком 6, выполненным в виде каретки 7, которая установлена в продольных направляющих 8 под балкой захвата. Каретка снабжена подвижными грузонесушими планками 9, которые смонтированы на ней с пэмэщью шарнирно-рычажной системы 10 типа ножниц и связаны с приводом 11 их вертикального перемещения. Для облегчения взаимодействия с выдвижными вилами грузонесущие планки имеют форму гребенки. В сложенном состоянии щарнирно-рычажная система размещается в пределах высоты балки захвата, а грузонесущие планки находятся под выдвижными вилами 5 с зазором, обеспечивающим возможность перемещения перекладчика грузов вдоль захвата. В варианте конструкции, показанной на фиг. б, для повышения производительности устройства на горизонтальной раме 1 металлоконструкции установлены накопители 12 . и1я грузов с вертикальными грузонесущи- ми ребрами.
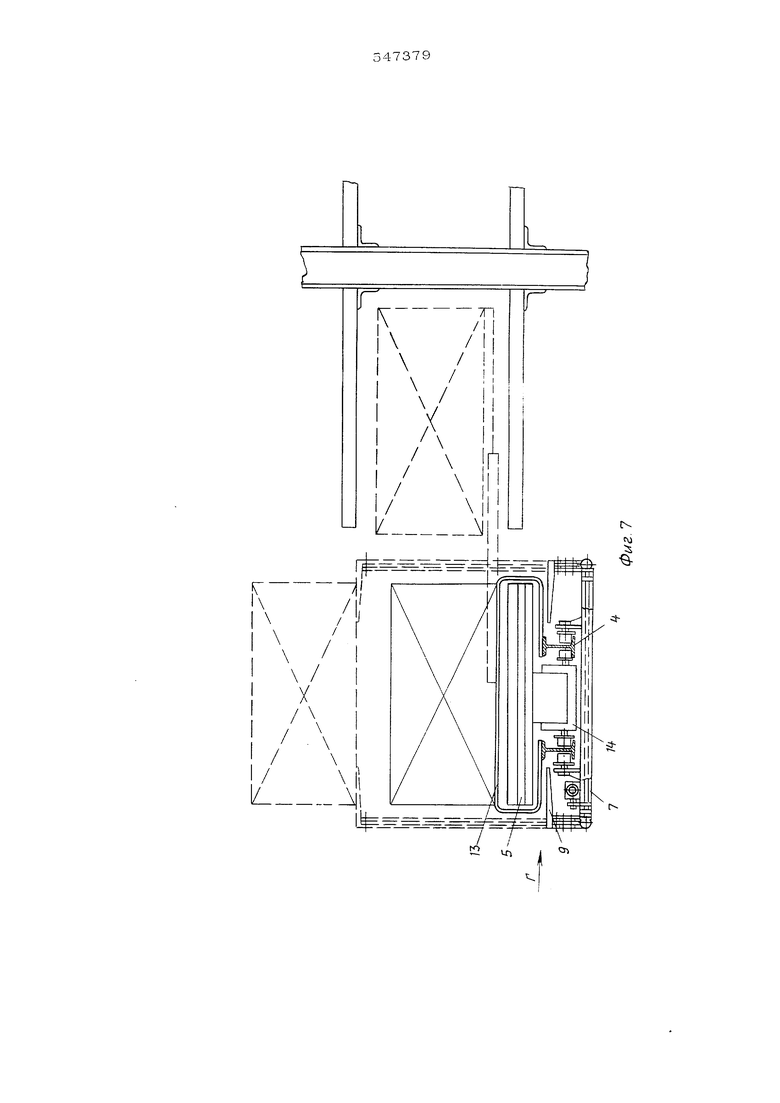
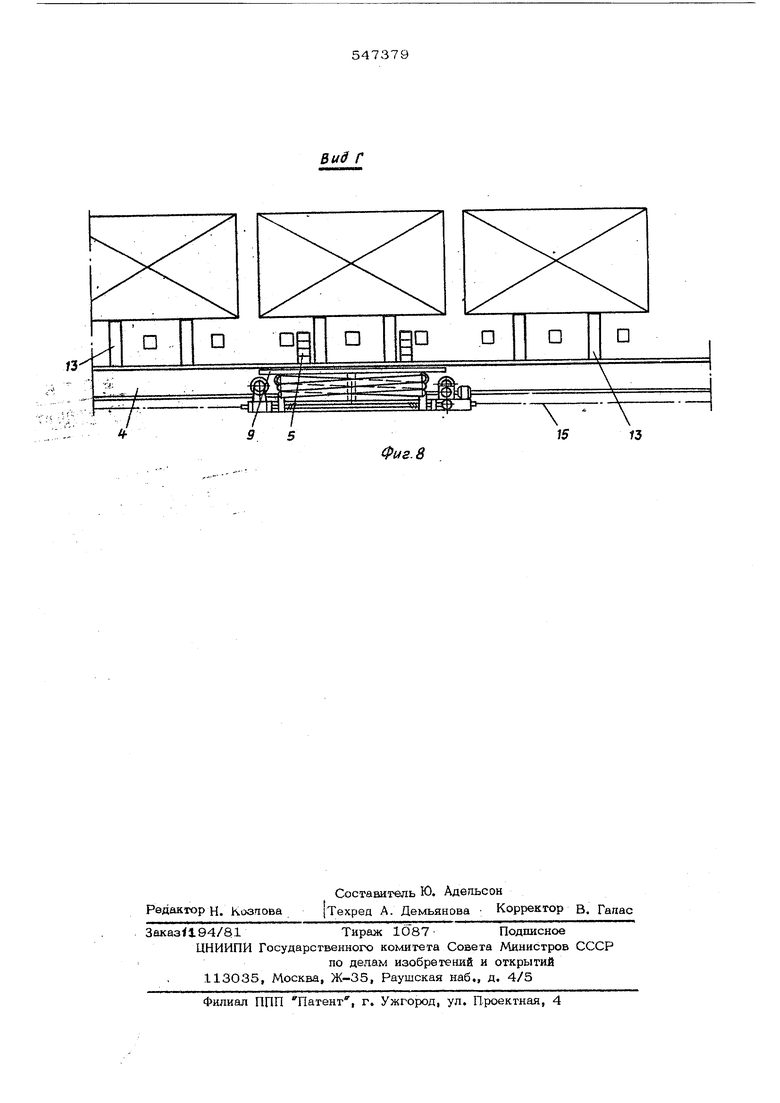
В варианте конструкции, показанном на фиг. 7, на балке 4 захвата смонтированы грузонесущие скобы 13, образующие гребенку по длине захвата и охватывающие выдвижные вилы, которые установлены на каретке 14, подвижной вдоль балки захвата и связанной с приводом ее перемещения тяговым органом 15. В этом варианте конструкции на горизонтальной раме устройства могут быть также установлены накопители для грузов.
Устройство работает следующим образом При выборочном комплектовании на столе 16, выполненном, например, в виде приводного рольганга с консольными роликами накапливается комплект разнотипных грузов Между соседними грузами, например с помощью стекателей, оставляются зазоры, достаточные для выборочного съема грузов при комплектовании. Комплект грузов формируется на столе 16 в таком порядке, чтобы первая операция по загрузке стеллажа была произведена без перекладки грузов на
захвате. Грузы снимаются со стола выдвижными вилами 5 и поднимаются в ra6apvr рамы 1, которая для этого выполнена со сквозным проемом. Грузы транспортируются к заданному стеллажу и опускаются грузовым захватом до уровня загружаемой стеллажной полки,
В соответствии с программой загрузки, учитывающей количество мест на полках стеллажа, выдвигаются соответствующие вилы 5, и грузы при опускании захвата устанавливаются в стеллаж за счет взаимодействия выдвижных вил захвата с вилочной стеллажной полкой. Если при последующей загрузке расположение оставшихся на грузовом захвате грузов не соответствует свободным местам на очередной загружаемой полке, то в работу вступает перекладчик грузов. Каретка 7 перекладчика перемещается по направляющим 8 к заданному грузу. При этом грузонесущие планки 9 находятся под выдвижными вилами 5 захвата. Затем включается привод подъема грузонесущих планок, шарнирно-рычажная система раскрывается, грузонесущие планки снимают груз с выдвижных вил и поднимают его над грузами, стоящими на захвате. Каретка 7 перемещается к заданным выдвижным вилам, грузонесущие планки перекладчика опускаются, и груз остается на вилах захвата. В случае, когда место на вилах занято другим грузом, он предварительно перекладывается на свободное место. Таким же образом грузовой захват подготавливается к каждой последующей загрузке стеллажных полок. Устройство с порожним захватом возвращается к столу 16 для взятия следующего комплекта грузов или производит разгрузку стеллажей, которая осуществляется аналогично описанному выще в обратной п ос ледовательности.
В варианте конструкции, показанном на фиг. 6, с использованием накопителей для грузов устройство работает следующим образом. Сформированный на столе 16 комплект разнотипных грузов забирается грузовым захватим, поднимается в верхнее положение и передается на накопитель. Вилы 5 при этом выдвигаются над ребрами накопителя и устанавливают на них грузы, утапливаясь в промежутках между ребрами накопителя. Таким же образом загружается накопитель, установленный с другой стороны захвата. Третий комплект грузов, взятый со стола 16, остается на захвате. Взаимодействие со стеллажами и перекладка грузов на захвате происходит так же, как описывалось выше. При необходимости накопители могут быть использованы для перекладки грузов. В этом , одни грузы снюч1аются с накопителей и устанавл ваются на заданные выдвижные вилы, а дру гие грузы могут быть переданы на освободившиеся места в накопитепях. В процессе работы устройство к- жат об служивать за один цикл один или несколько стеллажей. Пакетное склайироь iHite грузов производится без участия в работе перекладчика Укладка однотипных грузов в стеллажи пакетами и их разгрузка осуществляются за счет одновременного выдвижения вил грузо вого захвата. В варианте конструкции, показанном на фиг, 7, устройство:работает; следующим образом. Съем грузов со стола 16 производится грузонесущими скобами 13 захвата за счет утапливания консольных роликов стола в промежутках между скобами. Выдвижные вилы 5 при этом располагаются под грузонесущими скобами, а грузонесущие планки 9 находятся в нижнем положении. При укладке грузов в }степпажи в соответствии с программой загрузки каретка 14 перемещается вдоль захвата и устанавливается над заданным грузом так, чтобы ее выдвижные вилы оказались рядом с грузонесущими скобами 13, Випы приподнима ются, снимают груз с грузонесуших скоб, выдвигаются в стеллаж и, опускаясь, оставляют груз на стеллажной полке. При юследующей загрузке расположение оставщихся на захвате грузов npireoдится в соответствие со свободными местами на очередной загружаемой полке за счет перекладчика. Работает перекладчик так же, как и в предыдущем варианте. Од нако грузы снимаются и устанавливаются не только на выдвижные вилы, но и на гру зонесущие скобы 13. Пакетное складирование грузов производится без участия в работе перекладчика и выдвижных вил за счет взаимодействия грузонесущих скоб с вилочными полками стеллажей, утапливающимися между ними при передаче пакета грузов. Описанные выше варианты конструкции устройства предпочтительны для практичеС кого применения. Однако могут быть и дру
гие варианты конструкции, например, металлоконструкция устройства может быть портального, напольного, подвесного или
розаны Грузонесущие скобы, охватывающие выдвижные вилы с торцэв и образующие гребенку по длине захвата. мостового типа. Вертикальные направляющие металлоконструкции могут быть вьтолнены телескопическими или складывающимися по типу нюрнбергских ножниц. Накопители могут быть выполнены вилочного тила и установлены на горизонтальной раме подвижно. Грузонесущие планки перекладчика могут иметь иную конфш урацию и дру1гой тип механизма подъема. Устройство может одновременно укладывать разнотипные грузы пакетами в порож- ,ние стеллалш и производить их .выборочную отгрузку со склада. Устройство может быть использовано для обслуживания как стационарных, так и передвижных стеллажей на складах с любым ассортиментом тарно-штучных грузов, а также на складах листовых материалов, длинномерных и крупногабаритных грузов. Формула изобретения 1.Устройство для разгрузки и гагрузки стеллажей склада штучными грузами, содержащее передвижную вдоль склада металлоконструкцию с .горизонтальной рамой и вертикальньо и направляющими, охватьгоаю- стелла ки с торцов, в которых подвижно установлен грузовой захват, выполненный в виде балки, расположенной вдоль стеллажей, на которой смонтированы выдвижные вилы, отличающееся тем, что, с це/ью возможности комплектования и на-. копления грузов на грузовом захвате, последний снабжен перекладчиком грузов, выполненным в виде каретки, подвижно установленной под балкой захвата в продольных направлякицих и снабженной подвижными грузонесущими планками, связанными с при водом их вертшшльного перемещения: и расположенными с торцов выдвижных вил захвата. 2.Устройство по п. 1, отличаю щ е е с я тем, что привод вертикального перемещения выполнен в виде шарнирно-рычажной системы, например, типа ножниц. 3.Устройство по пп. 1и2, отличающееся тем, что выдвижные вилы установлены на каретке, подвижной вдоль балки захвата, а на балке захвата смонти --1
-Ч
f
фиг.1
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для разгрузки и загрузки стеллажей склада штучными грузами | 1974 |
|
SU547378A1 |
| Устройство для разгрузки и загрузки стеллажей штучными грузами | 1974 |
|
SU547377A1 |
| Устройство для азгрузки стеллажей штучными грузами и разгрузки их | 1974 |
|
SU547376A1 |
| Устройство для разгрузки и загрузки стеллажей штучными грузами | 1974 |
|
SU562464A1 |
| Устройство для загрузки и разгрузки стеллажей склада штучными грузами | 1974 |
|
SU685569A1 |
| Устройство для загрузки и разгрузки стеллажейСКлАдА | 1979 |
|
SU839883A1 |
| УСТРОЙСТВО для ЗАГРУЗКИ и РАЗГРУЗКИ СТЕЛЛАЖЕЙ | 1973 |
|
SU391980A1 |
| Устройство для загрузки и разгрузки многоярусных стеллажей склада | 1972 |
|
SU439452A1 |
| Устройство для загрузки и разгрузкиСТЕллАжЕй | 1979 |
|
SU819017A1 |
| УСТРОЙСТВО для ЗАГРУЗКИ и РАЗГРУЗКИ МНОГОЯРУСНЫХ СТЕЛЛАЖЕЙ | 1973 |
|
SU370142A1 |

Фиг. 2
J«
:l Узел I
Фиг.З
nil
ill
17
iXl RiТ
10
Ш
вуд В
Фиг.Б
-СЕ
Z.
©©
%.п
. -А
л
1
/
, / 1
у
/
.;j
ir /I
X/ I
I A
/
/
.
IN
fU
:s
r
ч
CTl
i-; Ln
Вид г
/3
