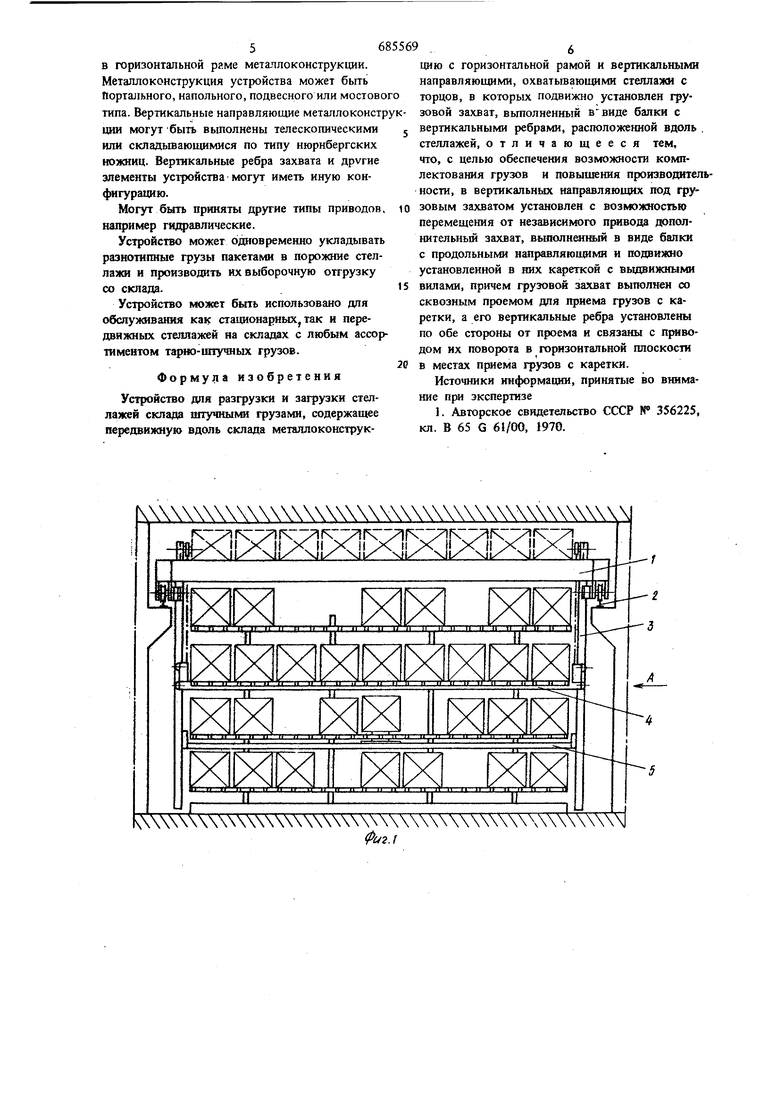
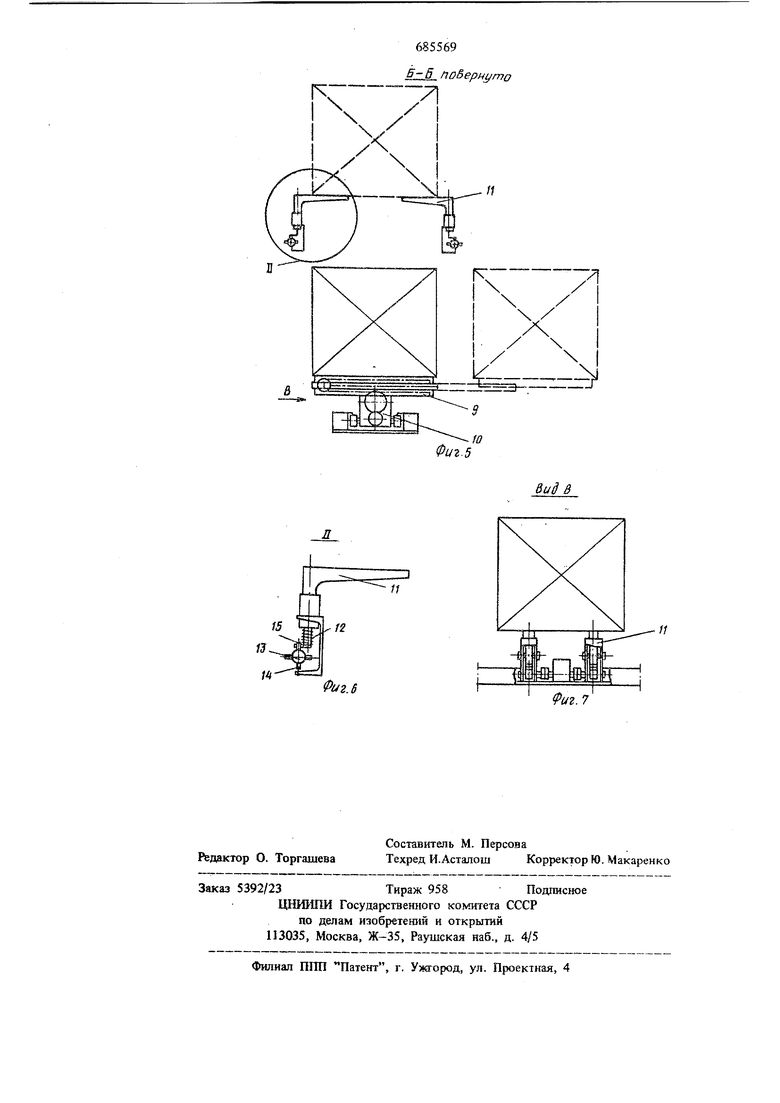
Изобретение относится к складскому оборуд ванию и касается устройств для разгрузки и загрузки стеллажей многономенклатурных складов щтучными грузамк. Известно устройство для разгрузки и загрузки стеллажей склада ипучными грузами, содержащее передвижную вдоль склада металлоконструкцию с горизонтальной рамой и вертикальными направляюищми, охватывающими стеллажи с торцов, в которых подвижно установлен грузовой захват, выполненный в виде балки с вертикальными ребрами, расположенной вдоль стеллажей {1}. Однако такие устройства обеспечивают только пакетное складирование грузов и не могут быть использованы для обслуживания многономенклатурных складов, когда необходимо производить выборочное комплектование грузов Цель изобретеш{я - обеспечить возможность комплектования грузов и повысить производительность устройства. Цель достигается тем, что в вертикальных направляющих под грузовым захватом установлен с возможностью перемещения от независимого привода дополнительный захват, выполненный в виде балки с продольными направляющими и подвижно установленной в них кареткой с выдвижными вилами, причем грузовой захват выполнен со сквозным проемом для приема грузов с каретки, а его вертикальные ребра установлены по обе стороны от проема и связаны с приводом их поворота в горизонтальной плоскости в местах приема грузов с каретки. На фиг. 1 изображено предлагаемое устройство, вид спереди; на фиг. 2 - вид по стрелке А на фиг. 1; на фиг. 3 - предлагаемое устройство, вид сверху; на фиг. 4 - узел I на фиг. 3; на фиг. 5 - разрез по Б-Б на фиг. 4; на фиг. 6 - узел 11 на фиг. 5; на фиг. 7 - вид по стрелке В на фиг. 5. Устройство содержит металлоконструкцию с горизонтальной рамой 1, передвигающуюся по рельсовым путям 2 вдоль склада. В вертикальных направляющих 3, охватьшающкх стеллажи с торцов, установлены подъемный грузовой захват 4 и расположенный под ним допюлнителлный захват 5, который имеет перемещение от независимого привода 6. Дополнительный захват выполнен в виде балки, на которой смонтированы продольные направ;(яющие 7 с подвижно установленной в них кареткой 8, снабженной выдвижн гми вилами 9, связанными с приводом 10. Грузовой захват выполнен со сквозным проемом для приема грузов с каретки и имеет вертикальные ребра 11, которые установлены по обе стороны от проема, связаны с приводом и могут поворачиваться в горизонтальной плоскости в местах приема грузов с каретки независимо от остальных. В исходном положении вертикальные ребра установлены поперек балки грузового захвата, перекрывая его сквозной проем, и удерживаются пружинаАШ 12. Привод поворота ребер содержит продольнь е штанги 13 с радиально установленными на них штьфями 14, взадмоде ствугощнми с рычагакда 15, закрепленными на концах осей вертикальных ребер. Штанги 13 имеют возвратно-поступательное перемещение, а также могут поворачиваться на заданный угол вокруг оси от отдельного привода. Каждой группе вертикальных ребер соответствует определеннь1Й угол установки шгы рей 14 на оггангс, что обеспечивает поворот только той группы вертикальных ребер, чьи рычаги находятся в зацеплении ео штырял ш штакг 13. Высота вертикальных ребер грудавого захва та достаточна для полного уташшваиия вшючных Полок стеллажей в промежутках между ребрами При пакетном складаровании грузов. Устройство работает следующим образом. При выборочном комплектовании на столе 16, вьиюлиенном в виде приводного рольганга с консольными роликами, накапливается комплект разнотипных грузов. Грузы устшавливаются с эчзоралв один относительно другого, дрстаточнылш дия выборочного съема или установки в стеллажи при комплектовании. Эт производится с помощью ряда отсекателей, ус тановленных с определенным шагом, или других аналогичных средств. Сформированньй пакет снимается со стола грузовым захватом 4. При этом дополнительный захват 5 установлен в габарите грузового захвата таким образом, что выдвижные вилы 9 грузозахватной каретки находятся под вертикальными ребрами 11, которые производят съем грузов, про ходя между консольныли роликами стола 16 н приподнимаясь над их уровнем. При дальнейших перемещениях устройства до укладки грузов в стеллажи захваты 4 и 5 работают в совмещенном положении. 94 Захваты с грузами поднимаются в габарит горизонтальной рамы 1 и устройство перемещается к заданному стеллажу. При опускании захватов 4 и 5 к загружаемой стеллажной полке они останавливаются выше загружаемой стеллажной полки на расстоянии, достаточном для съема грузов с грузового захвата 4 выдвижными вилами 9 каретки дополнительного захвата и укладки их на стеллажную полку. Каретка 8 перемещается под снимаемый груз, захват 5 приподнимается и выдвижные вилы 9 приподнимают груз, стоящий на вертикальных ребрах 11. Штанги 13 поворачиваются вокруг оси до совмещения щтырей 14 с рычагами 15 вертикальных ребер, которые расположены под снимаемым грузом. После поступательного перемещения щтанг 13 вертикальные ребра II поворачиваются, освобождая проем грузового захвата для прохода груза. Затем захваты 4 и 5 разъединяются, дополнительный захват с грузом опускается до уровня загружаемой полки, вилы 9 вдвигаются с грузом в стеллаж и при опускаю1И проходят между вилками стеллажей полки, оставляя груз в стеллаже. Следующие грузы могут быть загружены на ту же или любую другую стеллажную полку по заданной программе. Все последуюадие операции по передаче грузов с грузового захвата на дополнйтельньй и и; укладка в стеллажи производится аяалогйч}ш. В соответствии с заданной программой комплектования устройство может обслуиетвать один или несколько стеиЛажей склада за один цикл. Выбороздтое комплектование при разгрузке склада осуществляется таким же образом, но в обратшй последовательности. Пакетное складирование однотипных грузов проязводатся без участия в работе дополнительного захвата, который в этом случае совмещается с грузовым захватом. Устройство Производит пакетную укладку . грузов в сте.гшажи следующим образом. Пакет грузов формируется на том же столе 16, но без зазоров между грузами. Грузовой захват снимает со стола пакет грузов и поднимается в габарит верхней рамы с зазором над стеллажами, обеспе«швающим его перемещение вдоль склада к заданному стеллажу. При загрузке стеллажа захват вводится в его глу&|ну таким образом, что вилки стеллажной полки проходят между вертикапьньгми ребрами 11 захвата, утапливаясь в них по высоте. Захват при опускании оставляет грузы на полке и выводится из стеллажа. Разгрузка стеллажей производатся таким же образом, как и загрузка, но в обратной последовательности. Для повышения производительности устройство может иметь накопитель, установленный 56 в горизонтальной раме металлоконструкции. Металлоконструкция устройства может быть Портального, напольного, подвесного или мостово типа. Вертикальные направляющие металлоконстр ции могут быть вьшолнены телескопическими или складьшаюцщмися по типу нюрнбергских ножниц. Вертикальные ребра захвата и другие элементы устройства могут иметь иную конфигурацию. Могут быть приняты другие типы приводов, например гидравлические. Устройство может одновременно укладывать разнотипные грузы пакетами в порожние стеллажи и производить их выборочную отгрузку со склада. Устройство может быть использовано для обслуживания как стационарных, так и передвижных стеллажей на складах с любым ассор тиментом тар1ю-штучных грузов. Формула изобретения Устройство для разгрузки и загрузки стеллажей склада штучными грузами, содержащее передвижную вдоль склада металлоконструкодю с горизонтальной рамой и вертикальными направляющими, охватывающими стеллажи с торцов, в которых подвижно установлен грузовой захват, вьшолненный ввиде балки с вертикальными ребрами, расположенной вдоль . стеллажей, отличающееся тем, что, с целью обеспечения возможности комплектования грузов и повышения производительности, в вертикальных направляющих под грузовым захватом установлен с возможностью перемещения от независимого привода дополнительный захват, вьшолнзпол в виде балки с продольными направляюидамя и подвижно установленной в них кареткой с вьздвижкыми вилами, причем грузовой захват выполнен со сквозным проемом для приема грузов с каретки, а его вертикальные ребра установлены по обе стороны от проема и связаны с приводом их поворота в горизонтальной плоскости в местах приема грузов с каретки. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР W 356225, кл. В 65 G 61/00, 1970.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для разгрузки и загрузки стеллажей склада штучными грузами | 1974 |
|
SU547379A1 |
| Устройство для разгрузки и загрузки стеллажей штучными грузами | 1974 |
|
SU547377A1 |
| Устройство для азгрузки стеллажей штучными грузами и разгрузки их | 1974 |
|
SU547376A1 |
| Устройство для разгрузки и загрузки стеллажей склада штучными грузами | 1974 |
|
SU547378A1 |
| Устройство для загрузки и разгрузки стеллажейСКлАдА | 1979 |
|
SU839883A1 |
| Устройство для разгрузки и загрузки стеллажей штучными грузами | 1974 |
|
SU562464A1 |
| Устройство для загрузки и разгрузки стеллажей | 1976 |
|
SU569504A2 |
| УСТРОЙСТВО для ЗАГРУЗКИ и РАЗГРУЗКИ СТЕЛЛАЖЕЙ | 1972 |
|
SU356225A1 |
| УСТРОЙСТВО для ЗАГРУЗКИ и РАЗГРУЗКИ СТЕЛЛАЖЕЙ | 1973 |
|
SU391980A1 |
| УСТРОЙСТВО для ЗАГРУЗКИ и РАЗГРУЗКИ МНОГОЯРУСНЫХ СТЕЛЛАЖЕЙ | 1973 |
|
SU370142A1 |

N
|
.
ВидА
Фиг.2
/
I I
пал о
ptf
Фиг л
.6
Фиг. 5
PU2.7
