Изобрэтепие относится к облг-ста Бьсо1;:з мерительной техники.
Известны устройства, содержащье ья&ролотки основной и ТОНКОЙ дозы, расположеикы один над другим и имеющие приводы, связап ные с системой измерения |1, 2.
Эти устройства используются для дозирования рыбы с малой объемн:о1; массой и не могут быть применены иа крупной рыбе, так как для получения заданной дозы с достаточ ной ТОЧНОСТЬЮ необходимо подбирать послед НИИ экземпляр рыбы, загружаемый в грузоприемный бункер такой массы, чтобы получить требуемуй дозу.
Наиболее близким по технической сущнос ти является устройство, содержащее накопительный бункер, загрузочный транспортер с приводом, штучный питатель рыбы с приводом, грузоприемный бункер с приводом, установленный на весовом устройстве, датчик массы экземпляра рыбы и пульт управления, включающий задатчик дозы и блок задержки сигналов 3.
Недостатками известного устройства являются применение ручного труда на доклад1;;.,йро.л ь г:р01:ССс;-- ,цо:-1:1;1ОваЧ ;Л U аизкая очпость AiO upoHiiviir, лромь того.
Б yC.T jCi:CTB ; НО : QAVCAiOTofcilO i:OK;iJO:e :ilie
возникающих при качка судов.
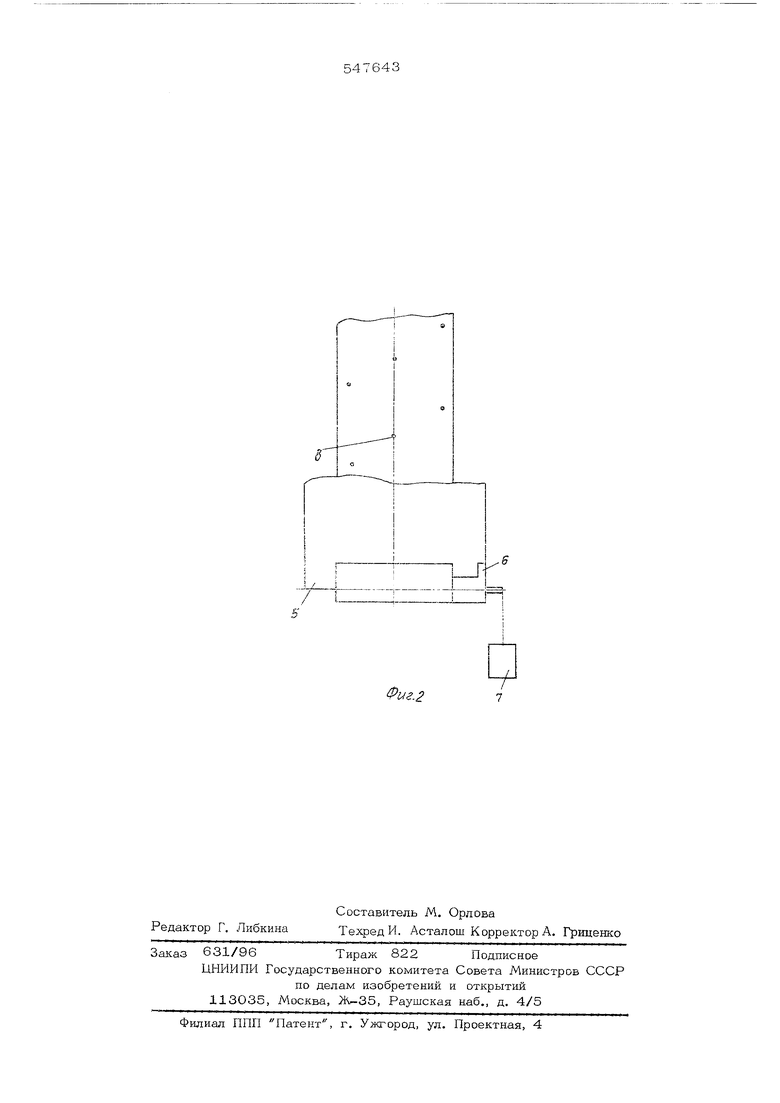
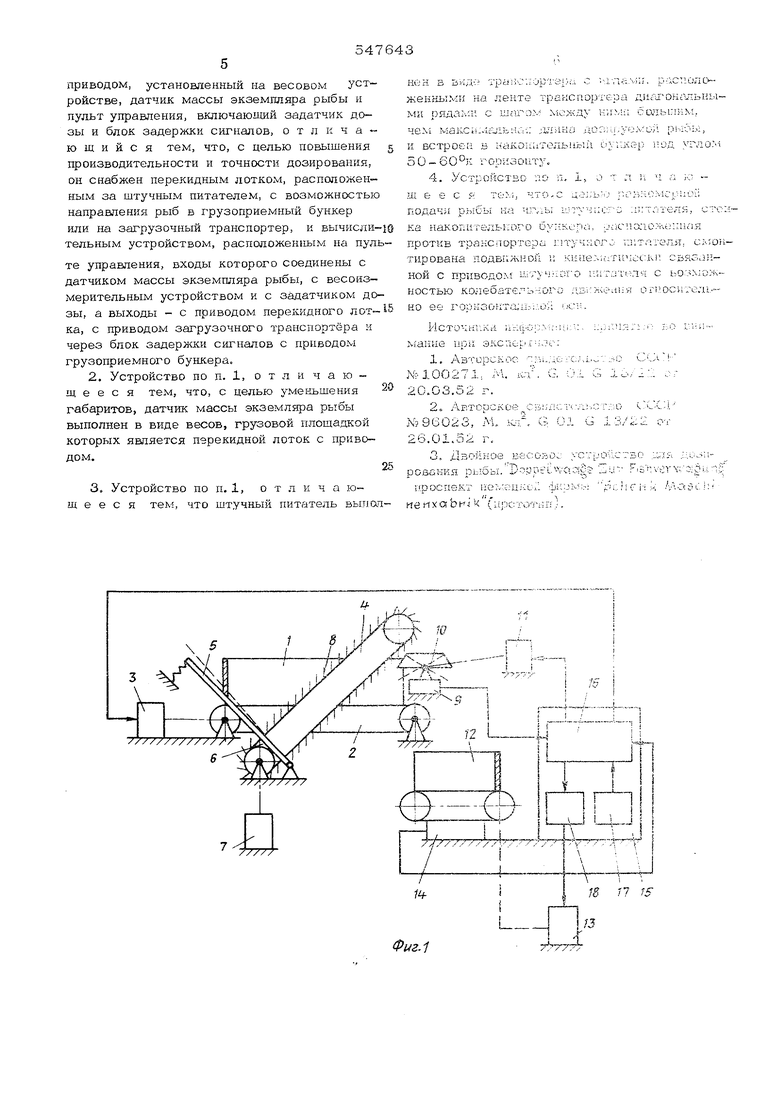
весозо/; дозатор leTUOAiiMOCKoro дейстз1 н, кадрцмер рыбы, снабжен перекидныл; аогко.. расположенны1 1 за штучным питателем, с возможностью иаправлэния рьгЗ Б грузоприамный бункер 1ИИ иа .загрузочный транспортёр, и вычислительньп - устройствол;, расположеннь м на njTibTe упрааттекия, входы которого соединены с датчиком массы экземпляра рыбы, с весоизмерительным устройством и с задатчиком дозы, а выходы - с приводом перекидного лотка, с приводов; загрузочного транспортера и через блок задержки сигналов с приводом грузоприёмного бункера. Датчик массы экземпляра рыбы выполнен в виде весов, грузовой ПЛОЕШДКОЙкоторых SJBляется перекидной лоток с приводом; штучный питатель выпалнен Б виде транспортёра 547 с иглами, расположенными на ленте транспо{)тёра диагональными рядами с шагом меж ду ними большим, чем максимальная длина дозируемой рыбЫ; и встроен в накоттаельный бу;жер под углом 5 0-6 О к горизонту; стенка накопн-гейчьного бункера, pacjiojiomeaная против транспортера штучного .пя, смонтарована подвижной к кинематически саязанкок с приводом штучного питателя с возможностью 1чолебательного движения относктельно ее горизонтальной оси На фиг. 1 изображен автолштический весо вой дозатор, общий вид; на фиг . 2 - штучны питатель. Автоматический весовой дозатор содержат накопите.пьный бункер 1, выполненный в виде 1,рямоугольной. емкости, дном которой ягжяет ся загрузочный транспортёр 2 с приводом 3 и штучный питатель 4,, заглубленный ниже рабочей транспортерной ленты загрузочного транспортёра 2 и установленный под углом 50 -- 60 к горизонту. Сте0,ка 5 накопителы-ю бункера 1, установленная напротив штучного питателя 4, смонтирована подвижной и кинематически связанной с приводом штучного питателя с возможностью колебательЕО го движения относительно ее горизонтальной оси и кинематически посредством ку.лачка 6 связана с пр .шодом 7 штучного питателя 4, Штучный питатель 4 состоит из наклонного транспортера, на транспортерной ленте которого установленьз иглы 8, расположенньге ди гональ}1ЫМи рядами с шагом ними бол шим, чем зозкшжная М41КСЕмальная длЕна дозируемой рыбы, Датчик 9 массы экземпляр рыбь выполиеи в Б11Дй пружинных весов с преобразователем дефор -5г ции пружм -:ы Е электрический сигнал, поoiiODuwопальный деформации, а ГРУзовай плоя;адка весов яааяется перекидным лотком 10 с приводом 11. Грузоприемный бункер isi аыполкен ь виде прямоугольной емкости, дком которой яачяется транспортер с приводом 13. Грузоприемный бункер 12 установлен иа весоизмерительном устройстве 14, которое снабжено схемой компенсаци ускорений. На станине дозатора смонтирован пульт управ,ленп5 15, в котором расположены вычислительное устройство 16, задатчик 17 дозы и блок задержки 18 сигналов. На вход вычислительного устройства 16 включены датчик 9 массы экземплгфа рыбы, задатчик 17 дозьг и весоизмерительное устройство 14, а на выход - привод 11 перекидного лотка 10, привод 3 загрузочного транспортера 2 и через блок задержки 18 сигналов привод 13 транспортера грузоприемного 12. Работа автоматического весового дозатО ра периодического действия осулестБЛяется следующим образом. Из накопительного бункера 1 загрузочным транспортером 2 и штучным питателем 4 рыба подается в грз зоприемный бункер 12, установленный на весовом устройстве 14. Кулачок 6 приводит в колебательное движение стенку 5 буккера 1. которая подвигает рыбу к штучному питателю 4. Рыба накалывается на иглы 8 и поштучно подается на перекидной лоток 10 и с него в грузоприемный бункер 12. Сигнал от весового устройства 14, пропорциональный массе рыбы, загружаемой в грузоприемный бункер 12, непрерывно поступает Б вычислительное з стройство 16, Одновременно в вычислительное устройство 16 поступают из задатчика 17 дозы сигналы, пропорциональные грубой и точной дозе. При достижении в бункере 12 грубой дозы весовое устройство 14 отключает привод 3 загрузочного транспортера 2 и переводит перекидной лоток 1О в попгожение загрузочный транспортер. -1тучный питатель 4 продолжает подавать рыбу на перекидкой лоток 10. При этом сигнал датчика 9 поступает на вход вычислительного устройства 16. Когда масса экзв пляра рыбы не соответствует массе, необхо димой для достижения точной дозы, перекидной лоток 10 сохраняет свое положение. Если масса экземпляр а рыбы соответствует достижЕшпо точной дозы, вычислительное устройство 16 выдает сигнал на привод 11 перекидного лотка 10 и он пр1гоодится в положение в грузоприемный бункер. Причем вьгчислительное устройство 16 будет держать перекидной лоток 10 в положении в грузоприемпый бункер только на время прохождения этого экземпляра рыбы. Одновременно вычислительное устройство 16 включает через блок задержки 18 привад 13 грузоприемного бункера 12 и точная доза рыбы выгружается. После выгрузки бункера 12 вычислительное устройство 16 снова приводит перекидной лоток 1О в положение в грузоприемный бункер и включает привод. 3 загрузочного rpafiспортера. Операция дозирования рыбы повторяется. Формула изобретения 1. Автоматический весовой дозатор пери-одического действия, например рыбы, содер жащий накопительный бу1шер, загрузочный транспортер с приводом, штучный питатель рыбы с приводом, грузоприемный бункер с приводом, установленный на весовом устройстве, датчик массы экземпляра рыбы и пульт управления, включающий задатчик дозы и блок задержки сигналов, отличающийся тем, что, с целью повышения производительности и точности дозирования, он снабжен перекидным лотком, расположенным за штуч1-ш1м питателем, с возможностью направления рыб в грузоприемный бункер или на загрузочный транспортер, и вычислительным устройством, расположенным на пул те управления, входы которого соединены с датчиком массы экземпляра рыбы, с весоизмерительным устройством и с задатчиком до зы, а выходы - с приводом перекидного лот ка, с приводом загрузочного транспортёра и через блок задержки сигналов с приводом грузоприемного бункера. 2. Устройство по п. 1, отличающ е е с я тем, что, с целью уменьшения габаритов, датчик массы экземляра рыбы выполнен в виде весов, грузовой площадкой которых является перекидной лоток с приводом. 3 Устройство по п, 1, о т л и ч а ющ е е с я тем, что штучный питатель выпал- кеихаЬи-зk ми рядакл с iunroj- icждy Maitca-.;djibtu:: : . л; к встроеа в KaKouiiTenbiibui 50-60% горизонту. 4. УстрОЙСТЗО ;1С П, 1, ш е е с я те.;. что.с подачп рыоы ка 1Г,1Ы ипуч ка накопительного 6v;{ Vi CXIOivt rLlcin против транспортера lit e-iu;TU4O(.. CBRoiJH- тирована подвижной o ингателч с t-o-iN;o;KИ и с приводом ностью колеоатегь г1БИл-;1:ч{1;я огносигсль..но ее 1оризокталь:;.1.:ь1 Источник 1-1 SirUi-o:;:-::: jviaHUG iipii э;1с; орГ;.7е; 1.Авторское ni-,u.i №100271. М, л.:;Г. G. 20.ОЗ.52 г. 2.Авторское.СБ:;Л( N996023, М. ivi, G . 26.01.52 г, О, xlBOiiHOe Вс;1.СЬОч Т.- . ч 1 ч ровакия рьюы. i-Oy kiirL. нроспекг пел-:оц;сс.- ф;
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ весового порционного дозирования рыбы и устройство для его осуществления | 1975 |
|
SU547644A1 |
| Устройство для автоматического весового дозирования штучных изделий | 1976 |
|
SU679812A1 |
| Устройство для автоматического весового дозирования штучных изделий | 1977 |
|
SU662818A1 |
| Способ весового порционного дозиро-ВАНия КуСКОВыХ МАТЕРиАлОВ | 1979 |
|
SU807067A1 |
| Способ весового дискретного дозирования сыпучих материалов | 1989 |
|
SU1642256A1 |
| Пневматический весовой дозатор непрерывного действия | 1977 |
|
SU684318A1 |
| ЛЕНТОЧНЫЙ ВЕСОВОЙ ДОЗАТОР | 2008 |
|
RU2387957C1 |
| СПОСОБ ВЕСОВОГО ДОЗИРОВАНИЯ СЫПУЧИХ МАТЕРИАЛОВ | 2005 |
|
RU2287136C1 |
| АВТОМАТИЧЕСКАЯ ПОТОЧНАЯ ЛИНИЯ ДЛЯ ПРИГОТОВЛЕНИЯ СТЕКОЛЬНОЙ ШИХТЫ | 1991 |
|
RU2028979C1 |
| Устройство управления весовым дозатором | 1977 |
|
SU673993A1 |