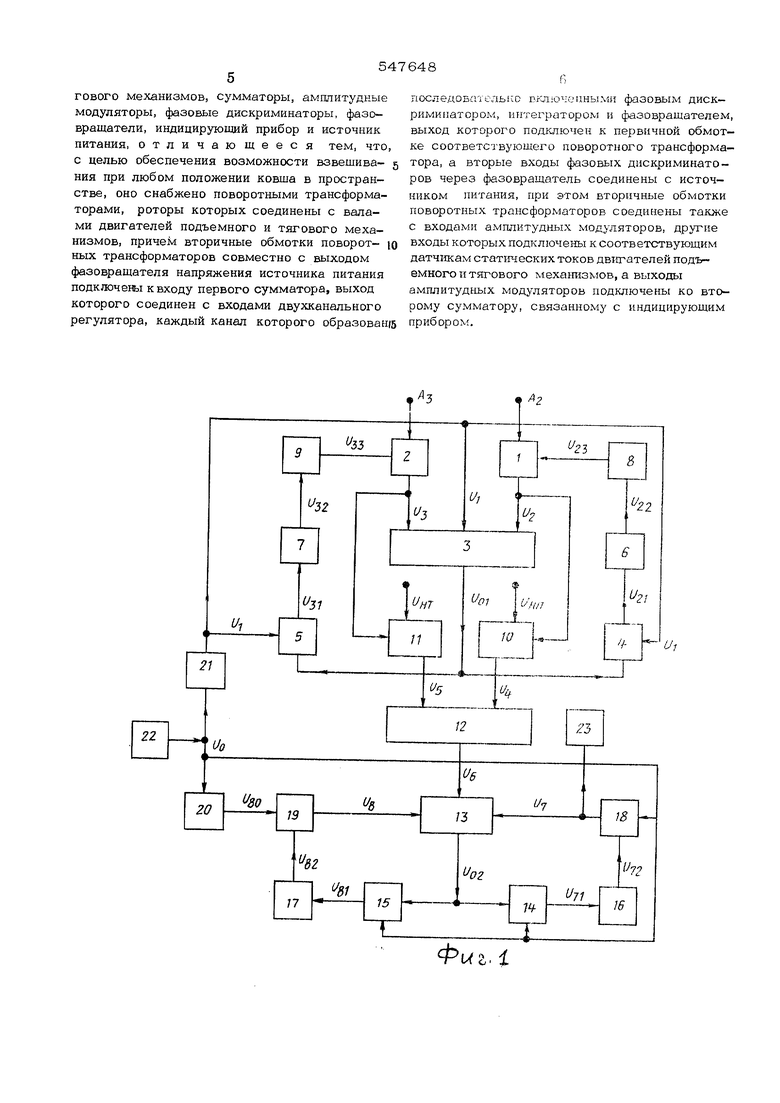
(54) УСТРОЙСТВО ДЛЯ ВЗВЕШИВАНИЯ МАТЕРИАЛА В КОВШЕ ЭКСКАВАТОРА На фиг. 1 изображена блок-схема устройства; на фиг. 2 изображен треугольник со сторонами, пропорциональными выбираемым длинам подъемного и тягового канатов и расстоянию между точками схода этих канатов со шкивом и векторы сил натяжения канатов QpH Q,rf , вектор результирующей сипы в точке подвески ковша Р к ее составляюшие: вер тикальная Р, равная весу ковша с материалом, и горизонтальная 8 , равная центробежной силе, возникающей при повороте платформы экскаватора. Устройство содержит поворотный трансфор матор 1, связанный с Всшом двигателя подъе ной лебедки, поворотный трансформатор 2, связанный с валом двигателя тяговой лебедки, сумматор 3, фазовые дискрилмииаторы 4 и 5, интегрирующие операционные усилители 6 и 7, фазовращатели 8 и О со стабилизи(ованным по адмплнтуде выходным иaпpяжeниe амплитудные лмодуляторы 10 и 11, сумматоры 12 к 13, фазовые дискриминаторы 14 и 15, интегрируюгнне огюрадноннг, усилители 16 и 17, амплитудные модуляторы J8 и 1& фазовраЩ|;1тели 2О и 21, псточикк с.-табплиои рованиого c n yc:oидaлыloгt) наирнжеинн 22 и индикагор веса 23. Работает устройство следул.иним обра.тюм. Работа основана на iOAe,n(ipo)i;ini-jit треу гольпика. обраоуемсто ии/ды-Х-пи,,:.,, v. т , ка1латами и .гпиаи гй милду том,кпК(И 1;.хо;д,:1 эти канатов со шкиве, м. uiut, i-jiyi;jM.,ix u точ ке подвески jCDBni.j, и;11гг я к( (-iue(i ного токд достоянной ifocTnT ;, lu этом иткшполагае1Х;й, тго платс орм, экс1уяиг1, nv-v juaется вокруг вертикгльпой осн., Нри работе экскаьитора Г)Ы; 1 рйо1Лы о подъемноло тшового капат о А-, с uo joщыо поворотных траисформато|Н)ъ 1 и 2 пре образую1Х:я соответствепно в иапряж.ения U-j и. Uj , амплитуд., KOTOpt.ix прппор-ционаиьиь длинам канатов. Эти напряжения, а также напрял ание 1Х| , имеющее амплитуду, проиорциональн то расстоянию между точками схода подъемного и TSETOBOI O канатов со шкивов и фазу, равную углу, образованному линией, соединяющей точки схода и BepTHKaj ью, подаются на сумматор 3. Амгшитуда и фаза напряжения U| в процессе работы Зстройства не меняются.. Фазовый лискрим 1натор 4 иреобрсмзуит фазовый Ciijjiu вектора папряжения Uj,, на выходе сумма Iopa 3 относительно вектора, перпендикулярного вектору Ц, в напряжение постоянного тока и Фазовый дискриминатор 5 преобразует фазовый сдвиг между векторами напряжений в напряжение постоянного тока . Интеграторы 6, 7 и фазовращатели 8, 9 к:,меняют фазы стабилизированных по амплитуде напряжений Ugj и возбуждения поворотных трансформаторов до тех пор, пока вектор напряжения U не станет близок к нулю (в пределах чувствительности фазовых дискриминаторов) . При этом векторы напряжений U, 5 имеют направления, моделирующие направления подъемного и тягового канатов. Напряжения постоянного токаи иУ, поступающие с датчиков статического тока двигателей подъемного и тягового механизмов и пропорциональные натяжениям соответству- ющих канатов, подаются на амплитудные модуляторы 10 и 11. В качестве напряжений несущей частоты используются напряжения U.J н Uj . Таким образом, напряжение U на выходе модулятора Ю имеет амплитуду, пропорционол.ьную натяжению подъемного каната, и ф,, равную углу, образованному направлением подъемного каната и вертикалью. Точно так же напряжение Ug на выходе модулятора 11 моделирует вектор натяжения тягового канато. Напряжение U и U суммируются в сумматоре 12, наггряжепие U па выходе которого модоларует иекаор равиодойптлуюшей К в точке нодвески ковша. Напряжение и,, подается на сумматор 13 имеете с напряжением U., имеющим нулевую и моделирующим рее порожнего ковша, и папряжением Ug, имеющим ({иауТ /йи модеjjupyioiiu-iM центробежную силу, Гаооцикяющую 1Ц)и аовороте платформы экскаватора. НапряwtjHjie Uygiia шлходе сумматора 13 в устаноИ1п;,11.;емся релсиме работы устройства равно нулю, что обеспечивается двухканальшзгм астати еским регулятором. С1х:тоящим из фазовых дискриминаторов 14, 15, интеграторов 16, 17 и амплитудных модуляторов 18, 19. ЧазоБращатель 20 обеспечивает фазовый сдвиг напряжения Ug относительно напряжения UQ, равный , фазовращатель 21 сдвигает вектор напряжения U относительно вектора напряжения UQ на угол, равный углу, образованному линией между точками схода подъемного и тягового канатов со шкивов и вертикалью. Фазовращатели 20 и 21 имеют выходные напряжения, стабилизированные по амп,п итуде. Напряжение UY измеряется вольтметром, ироградуированным в единицах веса ковша с материалом. Формула изобретения Устройство для взвешивания материала в ковше экскаватора, содержащее датчики статических токов двигателей подъемного и тя- гового механизмов, сумматоры, амплитудные модуляторы, фазовые дискриминаторы, фазовращатели, индицирующий прибор и источник питания, отличающееся тем, что с целью обеспечения возможности взвешивания при любом положении ковша в пространстве, оно снабжено поворотными трансформаторами, роторы которых соединены с валами двигателей подъемного и тягового механизмов, причем вторичные обмотки поворотных трансформаторов совместно с выходом фазовращателя напряжения источника питания подклочены к входу первого сумматора, выход которого соединен с входами двухканального регулятора, каждый канал которого образован последователькс кключеиными фазовым дискриминатором, интегратором и ф,азовращателем, выход которого подключен к первичной обмотке соответствующего поворотного трансформатора, а вторые входы фазовых дискриминаторов через фазовращатель соединены с источником питания, при этом вторичные обмотки поворотных трансформаторов соединены также с входами амплитудных модуляторов, другие входы которых подключены к соответствующим датчикам статических токов двигателей подъемно го и тягового меха1газмов, а выходы амплитудных модуляторов подключены ко второму сумматору, связанному с индицирующим прибором.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения веса ковша экскаватора с материалом | 1973 |
|
SU469893A1 |
| Устройство для взвешивания груза | 1980 |
|
SU994927A1 |
| Устройство для определения загрузкиКОВшА дРАглАйНА | 1978 |
|
SU812886A1 |
| Способ определения положения экскаватора-драглайна в пространстве | 1983 |
|
SU1121356A1 |
| Устройство для определения угла откоса предотвала | 1980 |
|
SU939656A1 |
| Способ определения веса ковша экскаватора-драглайна | 1976 |
|
SU662820A1 |
| Устройство для измерения загрузки ковша экскаватора | 1983 |
|
SU1145099A1 |
| Устройство автоматического контроля загрузки ковша экскаватора | 1978 |
|
SU866076A1 |
| Способ контроля процесса заполнения ковша-экскаватора-драглайна | 1985 |
|
SU1298311A1 |
| Способ определения массы ковша экскаватора-драглайна | 1978 |
|
SU861485A1 |

Фиг. 1
- .
л .- 547648
.
-t
. j
Qr
Фиг. 2
