Изобретение относится к автоматизированному измерению параметров ра- боты экскаватора и, в частности, предназначено для узмерения угла откоса образующей предотвала при ведении вскрышных работ по бестранспортным схемам с использованием экскаваторов-драглайнов.
Известны устройства,предназначенные для измерения основных параметров работы экскаватора-драглайна,в которых наряду с другими параметрами изме зяется угол отклонения каната и точка его схода с направляющего шкива, по которому, в частности, можно судить о величине угла наклона образующей предотвала Cl и t23.
Известно устройство для определения угла откоса преДотвала, содержащее датчики углов наклона экскаватора, вычислитель, выходной узел, измерители-преобразователи, связанные с осью лебедки подъема стрелы, с подъемным канатом осью верхнейлюльки, осью лебедки подъемного каната которые связаны между собой и вычислителем определенным .образом tS.
Однако это устройство обладает . значительной погрешностью в определ (НИИ угла отклонения ковша экскаватора.
Известно устройство для определения угла откоса предотвала, содержащее датчик угла поворота стрелы экскаватора, связанный с ним вычислитель с индикатором, датчики угла йаклона поворотной платформы экскаватора, пути перемещения .экскавато10ра, которие подключены к вычислитеjno C4J.
Недостатком указанного устройства является его относительная сложность и значительная погрешность из15мерения угла откоса предо.твала при измерении углов в вершине и в основании предотвала.
Цель -изобретения - повышение точности и упрсздение устройства.
20
Указанная цель достигается тем, что устройство снабжено подключенным к вычитателю датчиком угла наклона тягового каната к горизонту на двух поворотных трансформаторах,
25 выполненным с поворотными рычагами с прижимными роликами и установленным на корпусе блока наводки тягового каната экскаватора,при этом оси вращения пово отных рычагов с
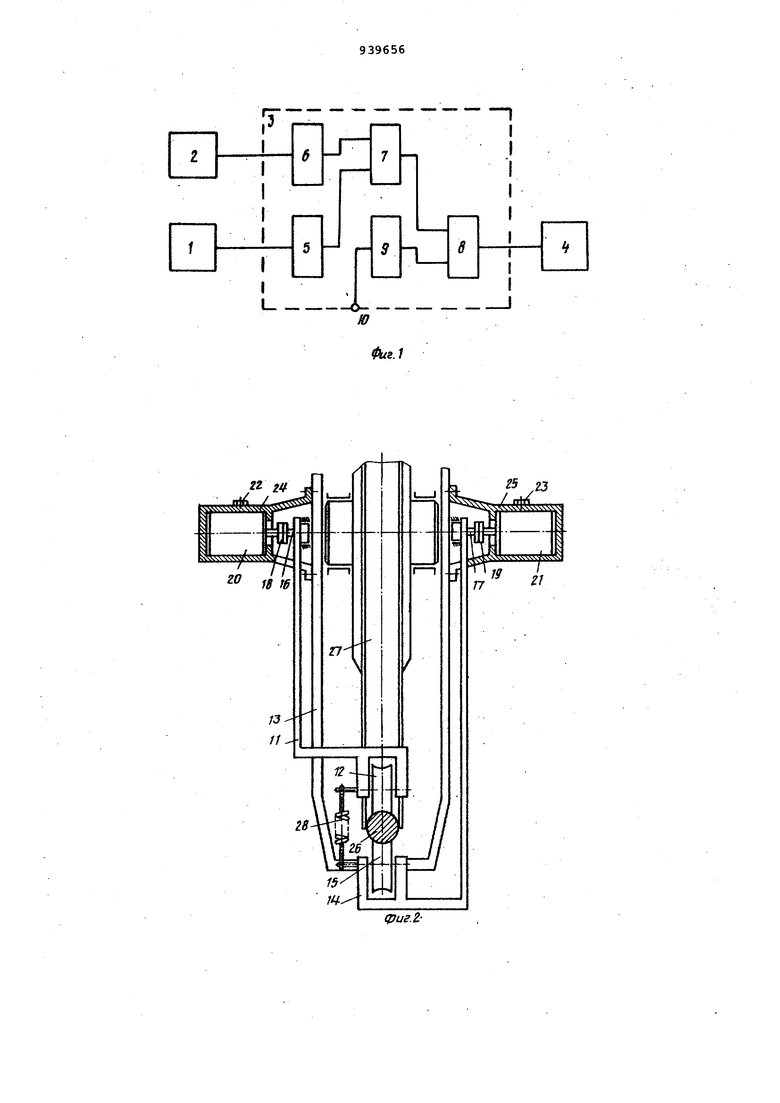
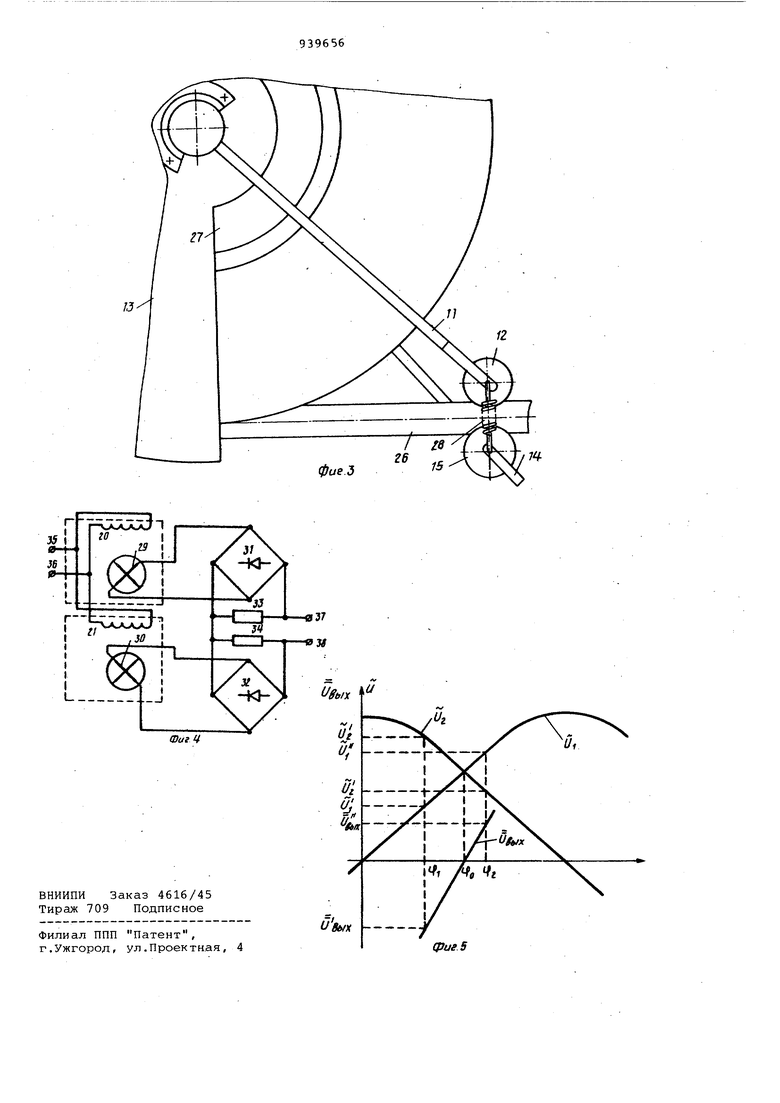
30 прижимными роликами расположены соосно оси вращения направляющих шкивов блока наводки, прижимные ролики расположены в одной плоскости и охватывают тяговый канат с двух сто рон , оси рычагов через муфты соединены с роторами соответствующих поворотных трансформаторов, статоры которых неподвижно закреплены на корпусе блока наводки. На фиг.1 представлена структурная схема устройства для определения угла откоса предотвала; на фиг.2 - датчик угла наклона тягово го каната, общий вид; на фиг.З схема установки датчика; на фиг.4 принципиальная схема датчика угла наклона тягового каната; на фиг.З эпюра напряжений на основных элементах датчика угла наклона тягового каната. Устройство содержит датчик 1 угла наклона тягового каната,, датчик 2 угла поворота стрелы экскаватора от ее перпендикулярного положения к бровке уступа, вычислитель 3 и выходной узел 4. Вычислитель 3 связан входами с датчиками 1, 2 и выходом с выходным узлом. Вычислитель 3 содержит преобразователь 5 функции cos преобразователь 6 функции ctg, множительное звено 7, преобразовате 8 функции arcctg и пороговый элемент (триггер Шмидта) 9. Преобразователи 3 и 5 своими выходами подклю чены к входам множительного звена 7 выход которого подключен к одному входу преобразователя 8. .К другом входу преобразователя 8 подключен выход порогового элемента 9, вход которого по цепи 10 подключен к якорной цепи двигателя механизма тя ги ковша. Датчик угла наклона тягового каната содержит (фиг.2 и 3)верхний поворотный рычаг 11 с укрепленным на нем прихсимным роликом 12. Поворотный рычаг 11 закреплен к корпусу 13 блока наводкитягового каната и имеет возможность поворачиваться вокруг точки закрепления. Аналогично закреплен нижний поворотный рычаг 14 с прижимньпЛ роликом 15. Ос вращения рычагов 11 и 14 соосно ося вращения направляющих шкивов блока наводки тягового каната. Полуоси 16 и 17 рычагов 11 и 14 через муфты 18 и 19 связаны с осями роторов поворо ных трансформаторов 20 и 21. Поворо ные трансформаторы 20 и 21 закреплены фиксаторами 22 и 23 в стаканах 24 и 25, снабженных кронштейнами. которые закреплены на корпусе блока Наводки. Прижимные ролики 12 и 15 прижимаются к тяговому канату 26 в непосредственной близости от точки схода его со шкива 27 блока наводки тягового каната. Прижимные ролики прижимаются к канату посредством пружины 28. Электрическая схема датчика угла наклона тягового каната выполнена следующим образом.(фиг.4). Синуснач обмотка 29 поворотного трансформатора. 20 и косинусная обмотка 30 поворотного трансформатора 21 подключены соответственно к выпрямителям 31 и 32, которые нагружены на резисторы 33 и 34 и включены встречно. По цепи 35 и 36 устройство подключено к сети переменного тока, клеммы 37 и 38 являются выходными. . Устройство работает следующим образом. Для определения угла откоса предотвала машинист экскаватора располагает загруженный ковш в какой-либо точке параллельно образующей откоса предотвала в нужном сечении, создает загрузочный момент в двигателе механизма тяги ковша и тем самым выбирает провисание тягового каната. На выходах датчиков i и 2 формиру ртся сигналы, значения которых пропорциональны углу наклона тягового каната cL- и углу поворота стрелы экскаватора от перпендикулярного направления к бровке уступа Ч.,- . Указанные сигналы поступают в вычислитель 3 и преобразуются преобразователями 5 и 6 (ctg ot|, cos4j соответственно) , которые поступают на входы множительного звена 7, на выходе которого формируется сигнал X ctgA -COSMIC При значении тока якорной цепи двигателя механизма тяги ковша не ниже установленного значения (т.е. ,с) , срабатывает пороговый элемент 9, который запускает преобразователь 8, в результате чего на его выходе формируется сигнал V arcctgX arcctg (ctgoL ). Указанный сигнал поступает на выходной узел 4-, где и отображается. Статоры поворотных трансформаторов 20 и 21 закреплены таким образом, что при горизонтальном положении отрезка тягового каната, набегающего на направляющий шкив 27 блока наводки тягового каната, выходные напряжения U. синусной обмотки 29 и U,j косинусной обмотки 30 равны (фиг.5), следовательно равны и встречно направлены выпрямленные токи, проходящие через соответствующие резисторы 33 и 34. Поэтому на выходных клеммах 32 и 38 результирующее напряжение П,, равно нулю, что соответствует горизонтальному расположению отрезка тягового каната вблизи точки его схода с напрпвляющего шкива. В процессе экскавации тяговый канат занимает различные углы наклона к горизонту, вслед ствие чего рычаги 11 и 14 изменяют свое положение и вращают роторы соответствующих поворотных трансфор маторов 20 и 21, тем самым передава им угловые положения каната. Если свисающая часть тягового каната наклонена на угол f ниже го ризонтальной плоскости, проходящей через точку схода каната с направля щего шкива блока наводки, то на кле и 38 формируется сигнал ивь;х К(и; -Ui), где G - выходное напряжение синусной обмотки 29 при угле поворотаротора от его нуI левого положения .Чо ; Ja - выходное напряжение косину ной обмотки 30 при угле Ч., поворота ротора от его нулевого положения Чо ; К - коэффициент пропорциональности перехода от перемен ного тока с напряжением U к выпрямленному току с напряжением О. BeJmчlma, отрицательная, поскольку ,. Аналогично формирует ся выходной сигнал при отклоне НИИ тягового каната выше горизонта на угол ri , при этом бвь1к K(Ui -Ua 0Если устройство предназначается для измерения углов откосов предотвала при нижнем черпании, т.е. когда экскаватор стоит на предотвале, то измерять углы отклонения тяговог каната выше линии горизонта нет необходимости.По этой причине весь диапазон изменения угла от О до Ч равный порядка 60° для обычных поворотных трансформаторов, мржно от.градуировать в пределах фактического изменения угла откоса предотвала Ч45т:30°). Такая градуировка осущест вляется одновременным поворотом . статоров трансформаторов на угол порядка 45° в соответствующую сторону Аналогично может быть настроен да чик при работе экскаватора с верхним черпанием. Датчик угла наклона тягового каната прост по конструкции и характеризуется высокими техническими показателями. Так, например, не влияют на показания датчика изменение питающего напряжения, температуры окружающей среды, износ прижимных роликов и тягового каната, поскольку в нем предусмотрено встречное включение выходных обмоток поворотных трансформаторов и применение друх прижимных роликов. Использование предлагаемого устройства позволяет оперативно определять углы откоса предотваша, что, во-первых, повышает безопасность проведения работ , поскольку обеспечивается контроль превышения безопасных значений углов откосов, во-вторых, способствует соблюдению расчетных значений угла откоса предотвала, что, в свою очередь, ликвидирует образование дополнительных объемов горной массы, подлежащей переэкскавации. За счет фактической реализации згщанных углов откоса предотвала ликвидируются дополнительные объеьвл переэкскавации, себестоимость переработки которых составляет сотни тысяч рублей. Формула изобретения Устройство для определения угла откоса предотвала экскаватора-драглайна, содержащее датчик угла поворота стрелы экскаватора и связанный с ним вычислитель с индикатором, отличающеес я тем, что, с целью повышения точности и упрощения устройства, оно снабжено подключенным к вычислителю датчиком угла наклона тягового каната к горизонту на двух поворотных трансформаторах, выполненным с поворотными рычагами с прижимными роликами и установленным на корпусе блока наводки тягового каната экскаватора, при этом оси вращения поворотных рычагов с прижимными роликами расположены соосно оси вращения направляющих шкивов блока наводки, прижимные ролики расположены в одной плоскости и охватывают тяговой канат с двух сторон, оси рычагов через муфты соединены с роторами соответствующих поворотных трансформаторов, статоры которых неподвижно закреплены на корпусе блока наводки. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР 546684, кл. Е 02 F 3/48, 1974. 2.Авторское свидетельство СССР № 411199, кл. Е 02 F 9/20, 1972. 3.Авторское свидетельство СССР 420741, кл. Е 02 F 3/48, 1972. 4. Авторское свидетельство СССР по заявке 28,18751/03, кл. Е 02 F 9/20 1980 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ учета основных показателей работы экскаватора-драглайна | 1979 |
|
SU1036850A1 |
| Способ контроля угла откоса при использовании драглайна | 1983 |
|
SU1162904A1 |
| Способ контроля положения ковша экскаватора-драглайна | 1984 |
|
SU1219754A1 |
| Способ оперативного измерения производительности экскаватора-драглайна | 1987 |
|
SU1585462A1 |
| Способ управления разгрузкой ковша экскаватора-драглайна | 1987 |
|
SU1502723A1 |
| Способ определения положения экскаватора-драглайна в пространстве | 1983 |
|
SU1121356A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛА ОТКЛОНЕНИЯ КОВША ЭКСКАВАТОРА-ДРАГЛАЙНА | 1972 |
|
SU420741A1 |
| Способ контроля работы экскаватора-драглайна | 1983 |
|
SU1129398A1 |
| Способ контроля процесса заполнения ковша-экскаватора-драглайна | 1985 |
|
SU1298311A1 |
| Способ управления разгрузкой ковша экскаватора-драглайна | 1985 |
|
SU1263761A2 |
W
Z5 ,23
