1
Изобретение относится к области весоизмерительной техники.
Известен способ измерения веса ковша экскаватора, используюш,ий сигнал статической составляюпдей тока двигателя подъема и сигнал датчика вхождения ковша в зоны взвешивания. Однако этот способ не обеспечивает требуемую точность из-за отсутствия прямого учета центробежных сил, действующих на ковш при повороте платформы экскаватора.
По предлагаемому способу синусоидальные сигналы напряжений с датчиков выбираемой длины подъемного и тягового канатов сдвигают по фазе на углы, соответствующие углам наклона канатов в вертикальной плоскости, амплитуды этих сигналов умножают на коэффициент, пропорциональный соответственно, сигналам датчиков статической составляющей токов двигателей подъема и тяги, преобразованные сигналы складывают и из суммарного сигнала путем вычитания сигнала горизонтальной составляющей, пропорционального центробежной силе, действующей на ковш, выделяют сигнал вертикальной составляющей, пропорциональной весу ковша с материалом.
На чертеже показана блок-схема устройства, с помощью которого может быть осуществлен предлагаемый способ.
Устройство содержит поворотные трансформаторы 1 и 2, сумматор 3, фазовые дискриминаторы 4 и 5, интеграторы 6 и 7, фазовращатели 8 и 9, амплитудные модуляторы 10 я
11, сумматоры 12 и 13, фазовые дискриминаторы 14 и 15, интеграторы 16 и 17, амплитудные модуляторы 18 и 19, фазовращатели 20 и 21, источник стабилизированного синусоидального напряжения 22 и индикатор веса 23.
Работа устройства основана на моделировании треугольника, образуемого подъемным и тяговым канатами и линией между точками схода этих канатов со шкивов, и сил, действующих в точке подвески ковша, напряжениями
переменного тока постоянной частоты. Амплитуды соответствующих напряжений при этом пропорциональны длинам сторон треугольников и величинам .векторов сил, а фазовые сдвиги соответствуют направлениям векторов
и стопон. Платформа экскаватора вращается вокруг вертикальной оси.
При работе экскаватора выбирается длина подъемного и тягового канатов А и Лз с помощью поворотных трансформаторов 1 и 2
преобразуется соответственно в напряжения 62 и Us, амплитуды которых пропорциональны выбираемой длине канатов. Эти напряжения, а также напряжение Ui, имеющее амплитуду, пропорциональную расстоянию между
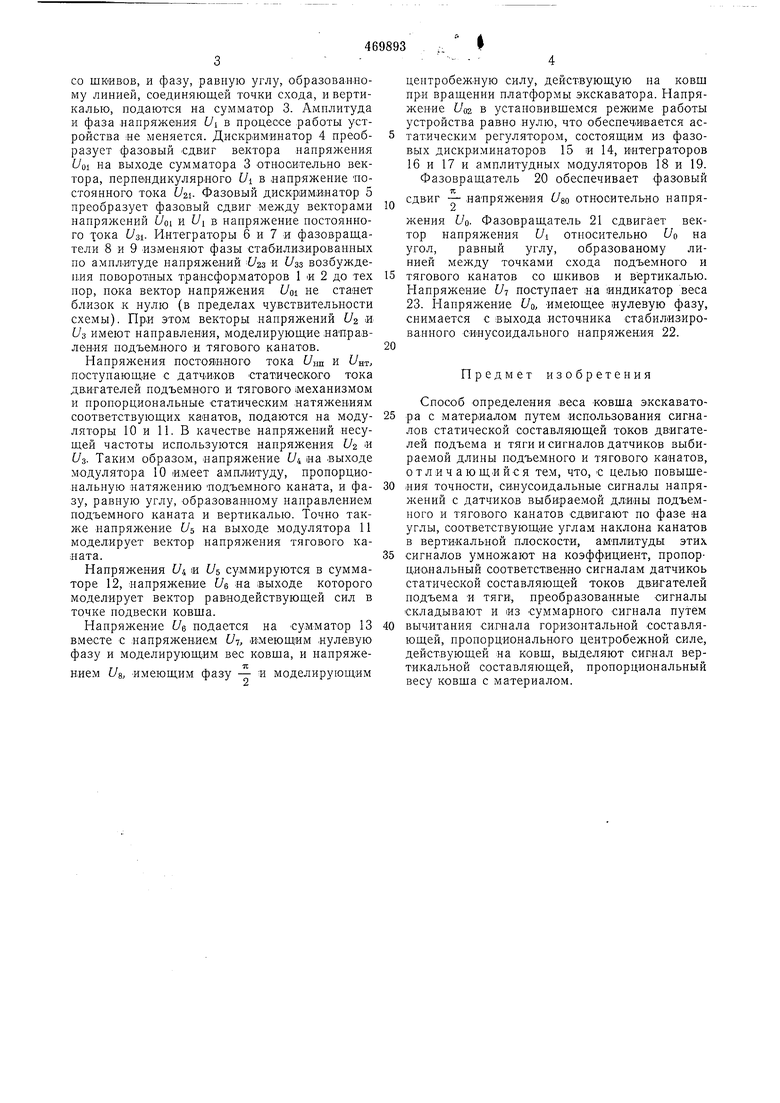
точками схода подъемного и тягового канатов со ШКИВОВ, и фазу, равную углу, образованному линией, соеднняюндей точки схода, и вертикалью, подаются на сумматор 3. Амнлитуда и фаза напряжения Ll в процессе работы устройства яе меняется. Дискриминатор 4 преобразует фазовый СДВИГ вектора напряжения Loi на выходе сумматора 3 относительно вектора, нерпбндикулярдого f/i в напряжение постоянного тока Uzi. Фазовый дискриминатор 5 преобразует фазовый сдвиг между векторами напряжений (Уо1 и t/i в напряжение постоянного тока Usi- Интеграторы 6 и 7 и фазовращатели 8 и 9 изменяют фазы стабилизированных по амплитуде напряжений Vza и t/зз возбуждения поворотных трансформаторов 1 и 2 до тех пор, пока вектор напряжения t/oi не станет близок к нулю (в пределах чувствительности схемы). При этом векторы напряжений 1/2 и /7з имеют направления, моделирующие направления подъемного и тягового канатов. Напряжения но€тоя1нного тока f/нп и L/лт, поступающие с датчиков статичеоко-го тока двигателей подъемного и тягового 1механизмом и пропорциональные статическим натяжениям соответствующих канатов, подаются на модуляторы ГО и 11. В качестве напряжений несущей частоты используются напряжения Uz и Us. Таким образом, напряжение U на .выходе модулятора 10 «мает амплитуду, пропорциональную натяжению подъемного каната, и фазу, равную углу, образованному направлением подъемного каната и вертикалью. Точно также напряжение f/s на выходе модулятора 11 моделирует вектор напряжения тягового каната. Напряжения f/4 и t/s суммируются в сумматоре 12, напряжение t/e на выходе которого моделирует вектор равнодействующей сил в точке подвески ковша. Напряжение Ue подается на сумматор 13 вместе с .напряжением f/7, имеющим нулевую фазу и моделирующим вес ковща, и напряжением L/s, имеющим фазу - и моделирующим центробежную силу, действующую на ковш при вращении платформы экскаватора. Напряжение f/02 в установившемся режиме работы устройства равно нулю, что обеспечивается астатическим регулятором, состоящим из фазовых дискриминаторов 15 и 14, интеграторов 16 и 17 и амплитудных модуляторов 18 и 19. Фазовращатель 20 обеспечивает фазовый сдвиг - напряжения Ugo относительно напряжения Lo. Фазовращатель 21 сдвигает вектор напряжения Ui относительно f/o на угол, равный углу, образованому линией между точками схода подъемного и тягового канатов со шкивов и вертикалью. Напряжение f/7 поступает на индикатор веса 23. Напряжение Uo, имеющее нулевую фазу, снимается с выхода источника стабилизированного синусоидального напряжения 22. Предмет изобретения Способ определения веса ковша экскаватора с материалом путем использования сигналов статической составляющей токов двигателей подъема и тяги и сигналов датчиков выбираемой длины подъемного и тягового канатов, отличающийся тем, что, с целью повышения точности, синусоидальные сигналы напряжений с датчиков выбираемой длины подъемного и тягового канатов сдвигают по фазе на углы, соответствующие углам наклона канатов в вертикальной плоскости, амплитуды этих сигналов умножают на коэффициент, пропорциональный соответственно сигналам датчикоь статической составляющей токов двигателей подъема и тягк, преобразованные сигналы складывают и из суммарного сигнала путем вычитания сигнала горизонтальной составляющей, пропорционального центробежной силе, действующей на ковш, выделяют сигнал вертикальной составляющей, пропорциональный весу ковша с материалом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для взвешивания материала в ковше экскаватора | 1975 |
|
SU547648A1 |
| Устройство для определения загрузкиКОВшА дРАглАйНА | 1978 |
|
SU812886A1 |
| Устройство автоматического контроля загрузки ковша экскаватора | 1978 |
|
SU866076A1 |
| Устройство для взвешивания груза | 1980 |
|
SU994927A1 |
| Устройство для измерения загрузки ковша экскаватора | 1983 |
|
SU1145099A1 |
| Устройство для контроля положенияКОВшА эКСКАВАТОРА-дРАглАйНА | 1979 |
|
SU827709A1 |
| Измерительное устройство к балансировочному станку | 1989 |
|
SU1649328A1 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ ЗАГРУЗКИ КОВША ОДНОКОВШОВОГО ЭКСКАВАТОРА | 1973 |
|
SU380800A1 |
| Способ учета основных показателей работы экскаватора-драглайна | 1979 |
|
SU1036850A1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ КОПАНИЯ ДРАГЛАЙНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2130998C1 |

