1
Изобретение относится к морской технике и может быть использовано на всех быстроходных судах, снабжаемых системами автоматического управления курсом.
Известна система стабилизации движущегося объекта, например самолета, по курсу, содержащая авторулевой с подключенными к нему датчиками угла и угловой скорости крена 1.
В этом устройстве ставится задача учета крепа для стабилизации по курсу, а сам крен не ограничивается.
Известна также система стабилизации бортовой качки и курса судна, преимущественно быстроходного, содержащая авторулевой с сумматором на входе и исполнительным механизмом рулевой машины, снабженной блоком обратной связи, датчики угла и угловой скорости рыскания и блок выработки сигнала, пропорционального углу бортовой качки, соединенные с соответствующими входами сумматора авторулевого 2.
Недостатком этого устройства является неуправляемость судна в момент превышения угла крена заданного значения, приводящего к выдержке руля в нулевом положении.
Цель изобретения - повышение эффективности стабилизации бортовой качки при сохранении эффективности стабилизации по курсу.
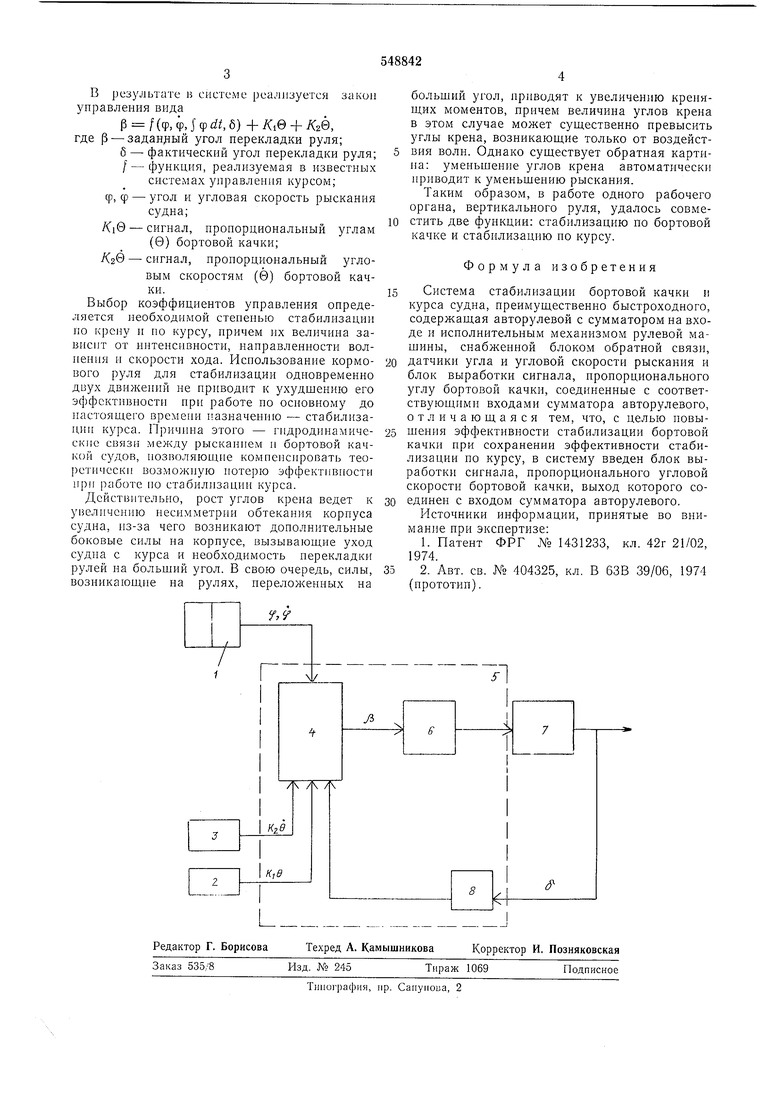
Для этого в систему введен блок выработки сигнала, пропорициопального угловой скорости бортовой качки, выход которого соединен с входом сумматора авторулевого. На чертеже представлена функциональная схема системы стабилизации.
Система состоит из датчиков 1 угла и угловой скорости рыскания судна, блока 2 выработки сигналов, пропорциональных угловой
скорости бортовой качки, и блока 3 выработки сигналов, пропорциональных углу бортовой качки, соединенных своими выходами с сумматором 4 авторулевого 5, соединенным через исполнительный мнханизм 6 рулевой машины
7 с кормовыми рулями (на чертеже не показаны), оснащенными блоком 8 обратной связи.
Система работает следующим образом. Сигнал, пропорциональный изменению параметров рыскания, поступает от датчиков 1 на сумматор 4 авторулевого 5. Одновременно блоки 2 п 3 вырабатывают сигналы, пропорциональные углам и угловым скоростям бортовой качки, которые поступают также в сумматор 4, где складываются с сигналами, иоступившими от датчиков 1.
Затем суммарный сигнал поступает в механизм 6 машины 7, которая приводит в движение кормовой руль, положение которого фиксируется блоком 8 обратной связи.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система уменьшения бортовой качки и рыскания по курсу судна | 1979 |
|
SU903813A1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| Система стабилизации судна по курсу и бортовой качке | 1982 |
|
SU1030260A1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДОВ | 2005 |
|
RU2277495C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КУРСОМ СУДНА И СИСТЕМА АВТОРУЛЕВОГО ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2004 |
|
RU2282884C2 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС НАВИГАЦИИ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ | 2011 |
|
RU2483327C2 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДНА | 2012 |
|
RU2501708C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КУРСОМ СУДНА | 1991 |
|
RU2012919C1 |
| Авторулевой | 1981 |
|
SU1095803A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СУДНОМ | 2004 |
|
RU2248914C1 |
