(54) АВТООПЕРАТОР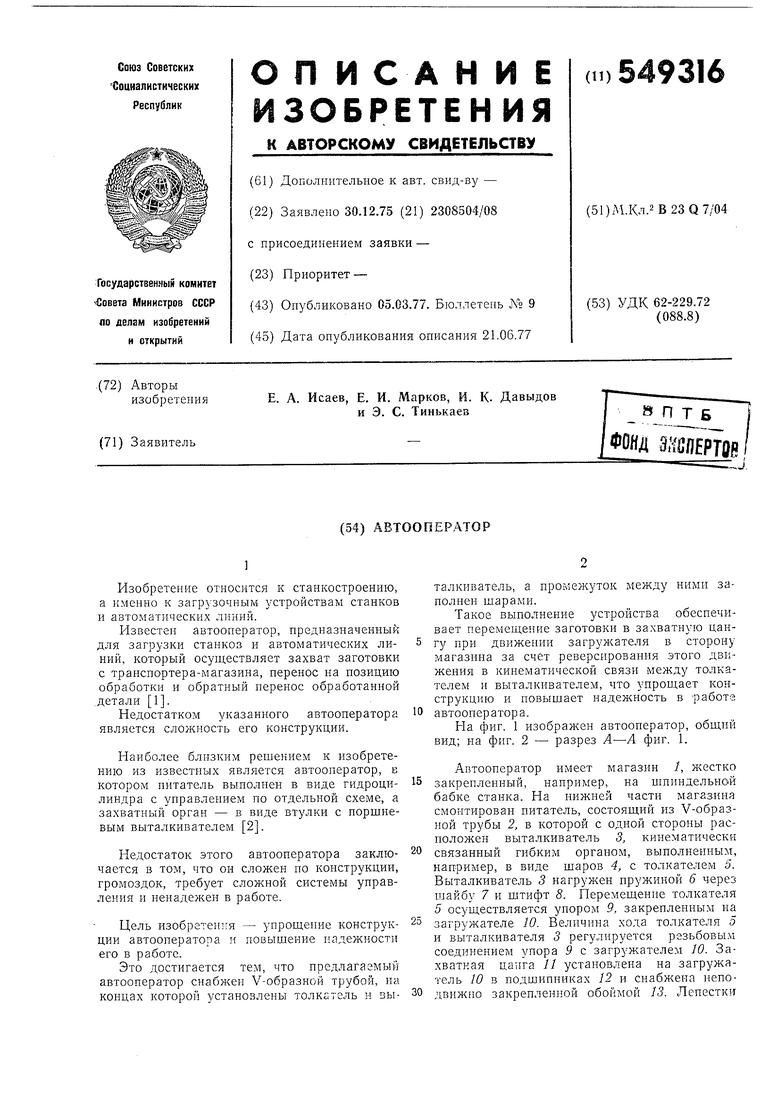
| название | год | авторы | номер документа |
|---|---|---|---|
| Автооператор | 1975 |
|
SU550270A1 |
| АВТООПЕРАТОР ДЛЯ ЗАГРУЗКИ И РАЗГРУЗКИ ДЕТАЛЕЙ12 | 1969 |
|
SU258003A1 |
| Технологический комплекс для обработки цилиндрических деталей | 1989 |
|
SU1761436A2 |
| Загрузочное устройство к токарному многошпиндельному станку | 1991 |
|
SU1816637A1 |
| Автооператор для металлорежущих станков | 1983 |
|
SU1144844A2 |
| Загрузочное устройство | 1972 |
|
SU443740A1 |
| Токарный патрон | 1987 |
|
SU1569090A1 |
| Роторный автомат | 1989 |
|
SU1691065A1 |
| Загрузочно-разгрузочное устройство к резьбофрезерному станку | 1984 |
|
SU1164012A1 |
| Токарный автомат | 1978 |
|
SU768570A1 |
Изобретение относится к станкостроению, а именно к загрузочным устройствам станков и автоматических линий.
Известен автоонератор, предназначенный для загрузки станков и автоматических линий, который осуществляет захват заготовки с транспортера-магазина, перенос на позицию обработки и обратный перенос обработанной .детали 1.
Недостатком указанного автооператора является сложность его конструкции.
Наиболее близким решением к изобретению из известных является автооператор, в котором питатель выполнен в виде гидроцилиндра с управлеппем по отдельной схеме, а захватный орган - в виде втулки с норшневым выталкивателем 2.
Недостаток этого автооператора заключается в том, что он сложен по конструкции, громоздок, требует сложной системы управления и ненадежен в работе.
Цель изобретения - упрощение конструкции автооператора и повышение надежности его в работе.
Это достигается тем, что предлагаемый автооператор снабжен V-образной трубой, на концах которой установлены толкатель н выталкиватель, а промежуток между ними заполнен шарами.
Такое выполнение устройства обеспечивает перемещение заготовки в захватную цангу нри движении загружателя в сторону магазина за счет реверсирования этого движения в кинематической связи между толкателем и выталкивателем, что упрощает конструкцию и повышает надежность в работе автооператора.
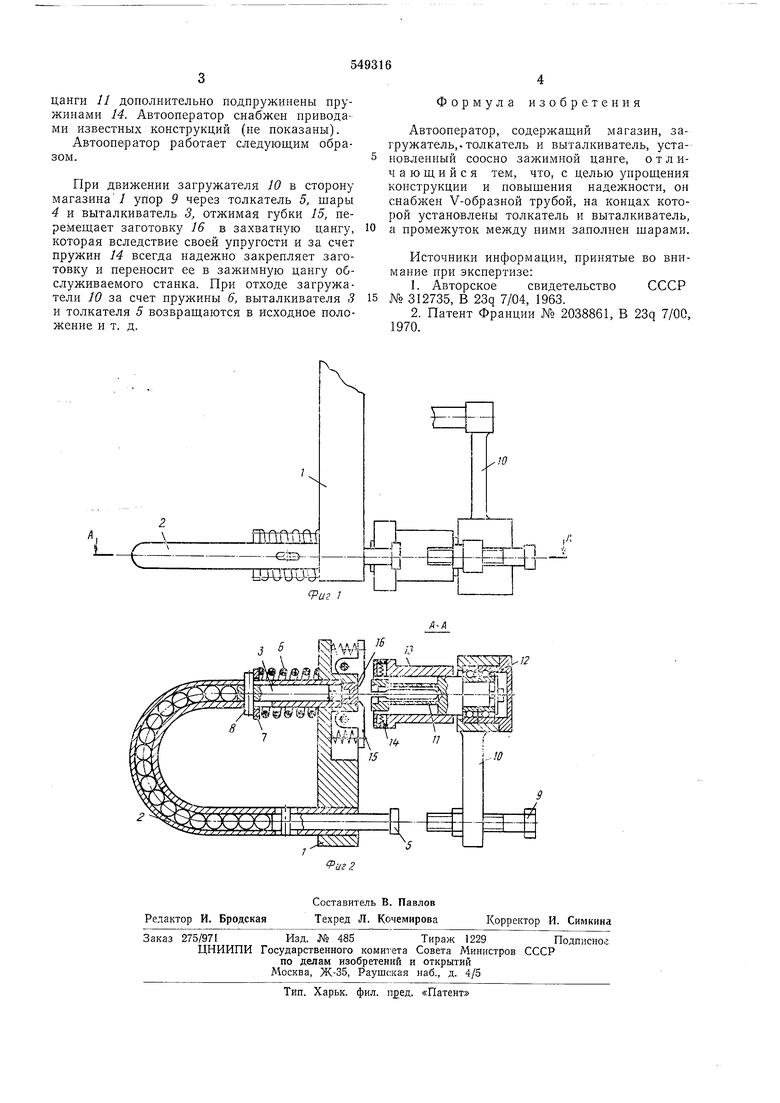
На фиг. 1 изображен автооператор, общий вид; на фиг. 2 - разрез Л-А фиг. 1.
Автоонератор имеет магазин /, жестко закрепленный, например, на шпиндельной бабке станка. На нижней части магазина смонтирован питатель, состоящий из V-образной трубы 2, в которой с одной стороны расположен выталкиватель 3, кинематически связанный гибким органом, выполненным, например, в виде шаров 4, с толкателем 5. Выталкиватель 3 нагружен пружиной 6 через шайбу 7 и штифт 8. Перемещение толкателя 5 осуществляется унором 9, закрепленным на загружателе 10. Величина хода толкателя 5 и выталкивателя 3 регулируется резьбовы.м соединением упора 9 с загружателем 10. Захватная цанга // установлена на загружатель 10 в подшипниках 12 и снабжена неподвижно закрепленной обоймой 13. Лепестки
цанги // дополнительно подпружинены пружинами 14. Автооператор снабжен приводами известных конструкций (не показаны).
Автоопе-ратор работает следующим образом.
При движении загружателя 10 в сторону магазина/ упор 9 через толкатель 5, шары 4 и выталкиватель 3, отжимая губки 15, иеремещает заготовку 16 в захватную цангу, которая вследствие своей упругости и за счет пружин 14 всегда надежно закрепляет заготовку и переносит ее в зажимную цангу обслуживаемого станка. При отходе загружатели 10 за счет пружины 6, выталкивателя 3 и толкателя 5 возвращаются в исходное положение и т. д.
Формула изобретения
Автооператор, содержащий магазин, загружатель,-толкатель и выталкиватель, установленный соосно зажимной цапге, отличающийся тем, что, с целью упрощения конструкции и повышения надежности, он снабжен V-образной трубой, на концах которой установлены толкатель и выталкиватель, а промежуток между пими заполнен шарами.
Источники информации, принятые во внимание при экспертизе:
