(54) КОМБИНИРОВАННЫЙ САМОНАСТРАИВАЮЩИЙСЯ РЕГУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1975 |
|
SU550617A1 |
| Самонастраивающийся регулятор | 1979 |
|
SU847273A1 |
| Самонастраивающаяся система автоматического управления для объектов с запаздыванием | 1981 |
|
SU1173390A1 |
| Самонастраивающаяся система управления | 1979 |
|
SU845143A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 2010 |
|
RU2460110C1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
| Самонастраивающийся привод | 1979 |
|
SU851338A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА | 1996 |
|
RU2111521C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2397529C2 |
| Самонастраивающаяся система управления | 1980 |
|
SU962852A2 |
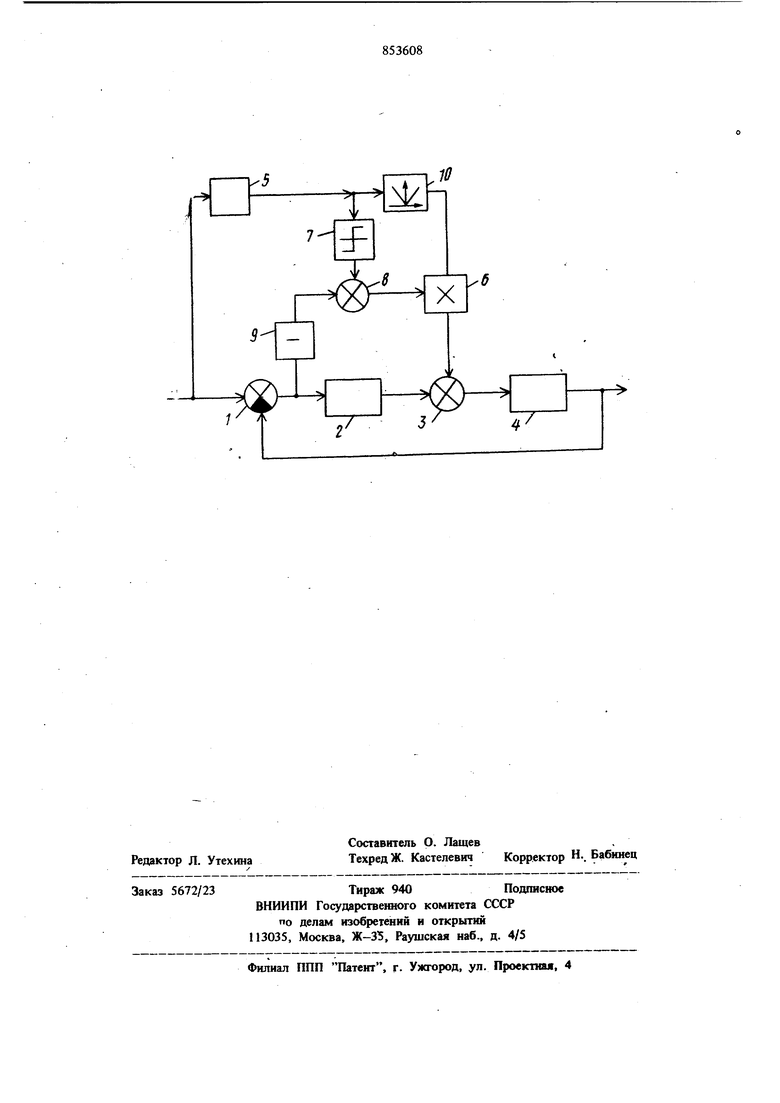
Изобретение относится к следящим системам, а именно к самонастраивающимся следящим системам с комбинированным управлением и может быть использовано для повыикиия их точности и быстродействия. Известны комбинироваиные регуляторы, содержащие компаундирующие связи, реализующие сигналы, пропорциональные производным от ВХОД1ЮГО угла, которые суммируются с сжгналом рассогласования 1. Недостаток этих систем состоит в их низкой точности при измена1ии параметров комп ундарующих связей или основного контура. Наиболее близким техническим рещенжм к яэо етеиию является комбинированный сам настраивающийся регулятор, содержащий комбинировашшй самонастраивающийся регулятор, сод нкшций последовательно соединенные тахо генфатор, выпрямитель, блок умножения, пер вый суммат и исполнительный элемент, выход которого соедниеи со входом второго мматора, второй вход которого соединен со входом тахогенератора, а выход - со вхо дом интегратора 2. Недостаток его состоит в его низком быстродействии и точности, обусловленных низким быстродействием цепи самонастройки компаундирующей связи. Целью изобретения является повышение быстродействия и точности работы регулятора. Поставлениая цель достигается тем, что регулятор содержит последовательно соединенные релейный элемент и второй сумматор, второй вход которого соединен с выходом интегратора, выход - со вторым входом блока умножения, а вькод тахогенератора соединен со входом релейного элемента. На чертеже изображена структурная схема комбинированного самонастранвающегося регулятора. Регулятор содержит измеритель рассогласования 1, предварительный усилитель 2, первый сумматор 3, исполнительный элемент 4, тахогенератор 5, блок умножения 6, релейный элемент 7, второй сумматор 8, интегратор 9 и выпрямитель Ш. При подаче скачкообразного сигнала регулятор работает следующим образом. Появивщееся в результате скачка рассогласование усиливается предварительным усилителем 2 и через первый сумматор 3 приводит в действие исполнительный элемент 4. Исполнительное устройство действует в необходимом направлении и отрабатывает сигнал рассогласования. Компаундирующая связь не оказывает действия на регулятор, поскольку сигнал на выходе тахогенератора 5 равен нулю. При обработке линейно-нарастающего сигнала возмохсны два режима работы регулятора в зависимости от степени компенсации сигнала ошибки компаундирующей свзяью. Если условие полной компенсации ошибки соблюдается, т.е. произведение коэффициентов перед чи тахогенератора и исполнительного устройства равно единице, то после окончания переходного процесса напряжение на выходе интегратора равно кулю. Заметим, что в регу.яторе- прототипе в указанном режиме интегратор должен накопить на выходе определенны сигнал для самонастройки, компаундирующей связи на полную компенсацию сигнала ошибки. Поэтому быстродействие регулятора-прототипа ниже, чем в предлагаемом регуляторе. Если условие полной компенсации не -соблюдается, то указанное преимущество предлагаемого регулятора сохраняется, так как сигнал интегратора лишь подстраивает цепь компаундирующей связи, парируя лишь вариации параметров регулятора, тогда как в регуляторе-прототипе интегратор полностью, настраивает компаундирующую связь. При отработке гармонического сигнала пред лагаемый регулятор имеет более высокие точностные показатели, чем регулятор-прототип. Действительно, в регуляторе-прототипе при гар моническом сигнале ошибка имеет также периодический характер и частотные свойства интегратора определяют скорость самонастройки компаундирующей цепи, т.е. на ошибку регулятора оказывает влияние инерционность интегратора, причем иапряжение последнего полностью определяет коэффициент передачи компаундирующей иепи. В предлагаемом регуляторе имеет место до полнительная связь через релейный элемент 7 сумматор 8 и блок умножения 6, так что коэффициент передачи компаундирующей связи от выхода тахогенератора 5 до сумматора 3 равен единице и его вариации вокруг этого значения определяются напряжением интегратора. Таким образом, общий коэффициент передачи компаундирующей цепи в предлагаемой системе лишь частично определяется интегратором, он значительно выше чем в регуляторепрототипе и поэтому предлагаемый регулятор имеет более высокую точность. Экономическая эффективность изобретения определяется тем, что предложенный регулятор имеет большие быстродействие и точность, чем известный, а его реализация ие вызьшает сколько-нибудь заметных технических трудностей. В регуляторе в максимальной степени использованы элементы уже имеющиеся в регуляторе-прототипе, а вновь введенные элементы могут быть выполнены на простых интеграль;ibix схемах. Формула изобретения Комбинированный самонастраивающийся регулятор, содержащий последовательно соединенные тахогенератор,. выпрямитель, блок ул ножения, первый сумматор и исполнительиый элемент, выход которого соединен с входом измерителя рассогласования, второй вход которого соединен с входомтахогенератора, а выход - с входом интегратора, отличающийся тем, что, с целью повышения быстродействия и точности работы регулятора, он содержит последовательно соединенные релейный элемент и второй сумматор, второй вход которого соединен с выходом интегратора, выход - с вторым входом блока умножения, а выход тахогенератора соединен с входом релейного элемента. ИсточниИ информации, принятые во внимание при экспертизе . 1. Коспок В. И. Самонастраивающиеся следяКиев. Техника, 1966, с. 74 щие системы, (прототип).
