1
Изобретение относится к манипуляторостроению и автоматике и может быть использовано при создании систем управления чувствительных манипуляторов.
Известно устройство для управления манипулятором, содержащее последовательно соединенные первый измеритель рас6огласования 1фивод задающего органа датчик положения задающего орган второй измеритель рассогласования, привод исполнительного.органа и датчик положения исполнительного органа, выход которого соединен с вычитающим входом второго измерителя рассогласовакия выход которого связан с суммирующим входом первого измерителя рассогласования, а выход привода задающе го органа подключен к вычитающему входу первого измерителя рассогласования, прти работе исполнительного сагана на жесткую преграду или в зоне упоров имеет запас устойчивости.
Наиболее близким техническим реше- HBetrf к изобретению является ycipofr ство, содержащее последовательно соединенные первый сумматор, привод задающего органа, датчик нагрузки задающего органа, датчик положения задающего органа, второй умматор, привод исполнительного органа и датчик нагрузки исполнительного органа, первый выход которого через датчик положения исполнительного органа связан со вторым входом второго сумматора, а выход - с первым входом первого сумматора, второй вход которого подключен ко второму выходу датчика нагрузки задающего .
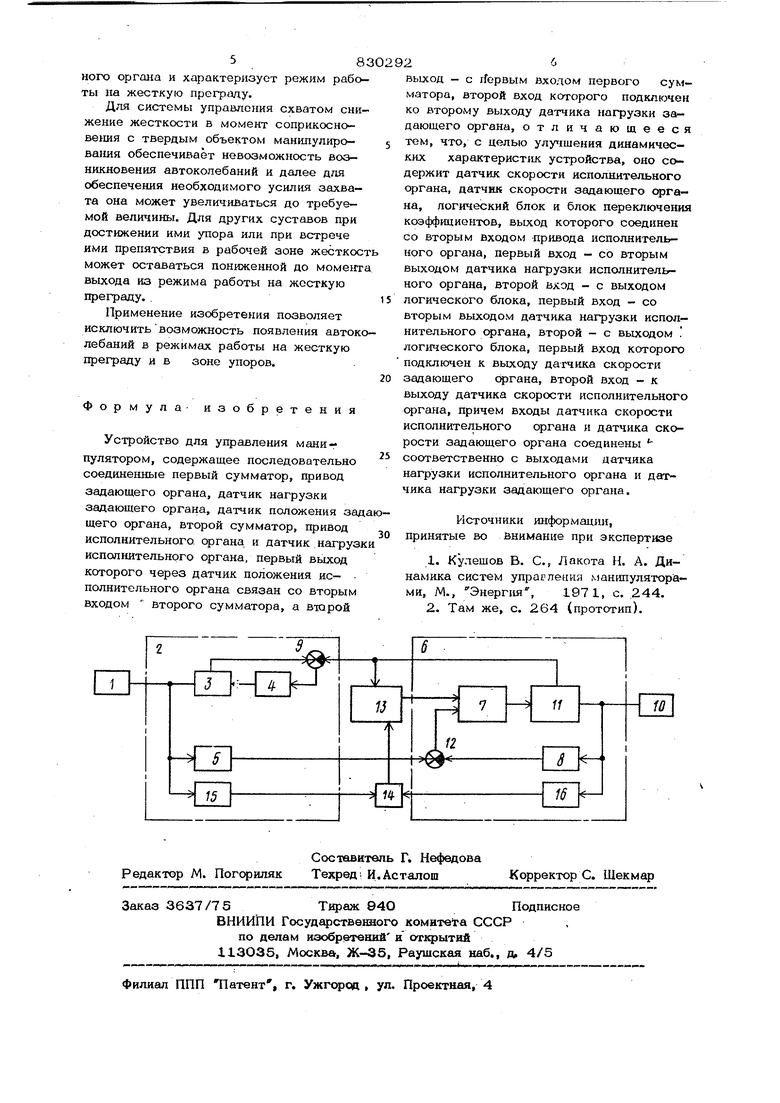
СЬвако это устройство не рещиг задачу по обеспечению устойчивости в режимах работы на жесткую преграду и в зоне упоров. Во избежание потеря устойчивости приходится увеличивать запас устойчивости системы, уменьшая коэффшшент усиления канала операторобъект, что в других режимах ухудшает статические и динамические свойства манипулятора. При увеличении запаса устойчивости .выбирается компромисс между требуемыми показателями качества в режиме работы на жесткую прегра и в других режимах, и как правило, при встрече с препятствием все же возникаю автоколебания, что предъявляет дополнительные требования к оператору, ведет к его утомлению, к ограничению набора выголняемых операций. Цель изобретения - улучшение динами ческих характеристик устройства. Цель достигается тем, что устройство содержит датчик скорости исполнительного органа, датчик скорости задающего органа, логический блок и блок переключения коэффициентов, выход которого соединен со вторым входом привода исполнительного органа, первый-вход - со вторым выходом датчи нагрузки исполнительного органа, второ вход - с выходом логического блока, первый вход которого подключен к выходу датчика скорости задающего органа второй вход - выходом датчика скорости исполнительного органа, причем входы датчика скорости исполнительного -орган и датчика скорости задающего органа соединены соответственно с выходами датчика нагрузки исполнительного орган и датчика нагрузки задающего органа. На чертеже изображена функциональн схема манипулятора. Манипулятор содержит оператор 1, задающий орган 2, датчик 3 нагрузки задающего органа 3, привод 4 задающего органа, датчик 5 положения задающег (фгана, исполнительный орган 6, привод исполнительного органа, датчик 8 полож ния исполнительного органа, первый сум матор 9, объект Ю манипулирования, датчик 11 нагрузки исполнительного органа, второй сумматор 12, блок 13 переключения коэффициентов, логически блок 14, датчик 15 скорости задающего органа и датчик 16 скорости исполнительного органа. Устройство работает следующим . образом. Оператор 1 прикладывает к рукоятке задающего органа 2 момент, который намеряется датчиком 3 нагрузки задающего органа и отрабатывается хфиводом 4 задающего органа. Сигнал с выхода датчика 5 положения задающего органа поступает на исполнительный opraji 6, . который приводится в движение приводом 7 исполнительного органа. Привод 7 исполнительного органа отрабатывает 924 сигнал датчика 5 положения задающего органа до тех пор, пока сигнал с выхода датчика 8 положения исполнительного органа не сравняется с сигналом датчика 5 положения задающего органа на втором сумматоре 12. Если на исполнительный орган 6 действует нагрузка с объекта 10 манипулирования, то между задающим органом 2 к исполнительным органом 6 возникает рассогласование, пропорциональное величине этой нагрузки и обратно пропорциональное жесткости исполнительного органа 6. Сигнал с датчика 11 нагрузки исполнительного органа поступает на задающий орган 2, где он на первом сумматоре 9 сравнивается с сигналом датчика 3 нагрузки задающего органа. Сигнал с выхода первого сумматора 9 отрабатывается приводом 4 задающего органа, который воспроизводит отраженную нагрузку на руку оператора 1. Кроме того, сигнал с выхода датчика 11 нагрузки исполнительного органа через блок 13 переключения коэфф1щиентов поступает на вход привода 7 исполнительного органа. Величина и знак связи по возмущению определяется блоком 13 переключения коэффициентов. Тем самым задается определенная жесткость исполнительного органа 6. Введение отрицательной связи по нагрузке приводит к снижению жесткости , положительной - к увеличению. Как уже отмечалось жесткость исполнительного органа 6 в режиме работы ifa жесткую преграду должна быть меньше, чем при работе в других режимах. Для регулирования жесткости исполнительчого органа 6, т.е. для обеспечения устойчивой и обладающей высокими показателями качества системы управления манипулятора во всех режимах,блок 13 переключения коэффициентов управляется от логического блока 14, который анализирует наличие того или иного режима работы манипулятора по сигналам датчика 15 скорости задающего органа и датчика 16 скорости исполнительного органа, В режиме работы на жесткую преграду сигнал на выходе датчика 16 скорости исполни тельного органа отсутствует, а если оператор 1 перемещает задающий орган 2, то на выходе датчика 15 скорости аадатчика ск:орости задающего органа сигнал присутствует. Такое сочетание сигналов датчика 15 скорости задающего органа и датчика 16 скорости исполнительного органа и характеризует режим рабо ты на жесткую преграду. Для системы управления схватом сни жение жесткости в момент соприкоснове шя с твердым объектом манипулирования обеспечивает невозможность возникновения автоколебаний и далее для обеспечения необходимого усилия захвата она может увеличиваться до требуемой величины. Для других суставов при достижении ими упора или при встрече ими препятствия в рабочей зоне жесткос может оставаться пониженной до момент выхода из режима работы на жесткую преграду. . Применение изобретения позволяет исключить возможность появления авток лебаний в режимах работы на жесткую преграду и в зоне упоров. Формула- изобретения Устройство для управления манипулятором, содержащее последовательно соединенные первый сумматор, привод задающего органа, датчик нагрузки задающего органа, датчик положения за щего органа, второй сумматор, привод исполнительного, органа и датчик нагруз исполнительного органа, первый выход которого через датчик положения ис- полнительного органа связан со вторым входом второго сумматора, а второй выход - с гГервым входом первого сумматора, второй вход которого подключен ко второму выходу датчика нагрузки задающего органа, отличающееся тем, что, с целью улучщения динамических характеристик устройства, оно содержит датчик скорости исполнительного органа, датчик скорости задающего с гана, логический блок и блок переключения коэффициентов, выход которого соединен со Вторым входом -привода исполнительного органа, первый вход - со вторым выходом датчика нагрузки исполнительного органа, второй вход - с выходом логического блока, первый вход - со вторым выходом датчика нагрузки исполнительного qpraHa, второй - с выходом . логического блока, первый вход которого подключен к выходу датчика скорости задающего фгана, второй вход - к выходу датчика скорости исполнительного органа, причем входы датчика скорости исполнительного органа и датчика скорости задающего органа соединены соответственно с выходами датчика нагрузки исполнительного органа и датчика нагрузки задающего органа. Источники информации, принятые во внимание при экспертизе 1.Кулещов В. С., Лакота Н. А. Динамика систем упрасления ман1шулятора- ми, М., Энергия, 1971, с. 244. 2.Там же, с. 264 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1979 |
|
SU824131A1 |
| Устройство для управления очувствленнымМАНипуляТОРОМ | 1979 |
|
SU824130A1 |
| Устройство для управления дистан-циОННыМ КОпиРующиМ МАНипуляТОРОМ | 1979 |
|
SU809048A1 |
| Устройство для управления манипулятором | 1973 |
|
SU552184A1 |
| Устройство для управления манипулятором | 1983 |
|
SU1101786A1 |
| Устройство для управления копирующим манипулятором | 1985 |
|
SU1262447A1 |
| Устройство для управления дистанционным манипулятором | 1988 |
|
SU1650427A2 |
| Устройство для управления схватом манипулятора | 1978 |
|
SU785842A1 |
| Устройство для управления звеном очувствленного манипулятора | 1974 |
|
SU517483A1 |
| Устройство для управления дистанционным манипулятором | 1976 |
|
SU582960A1 |
