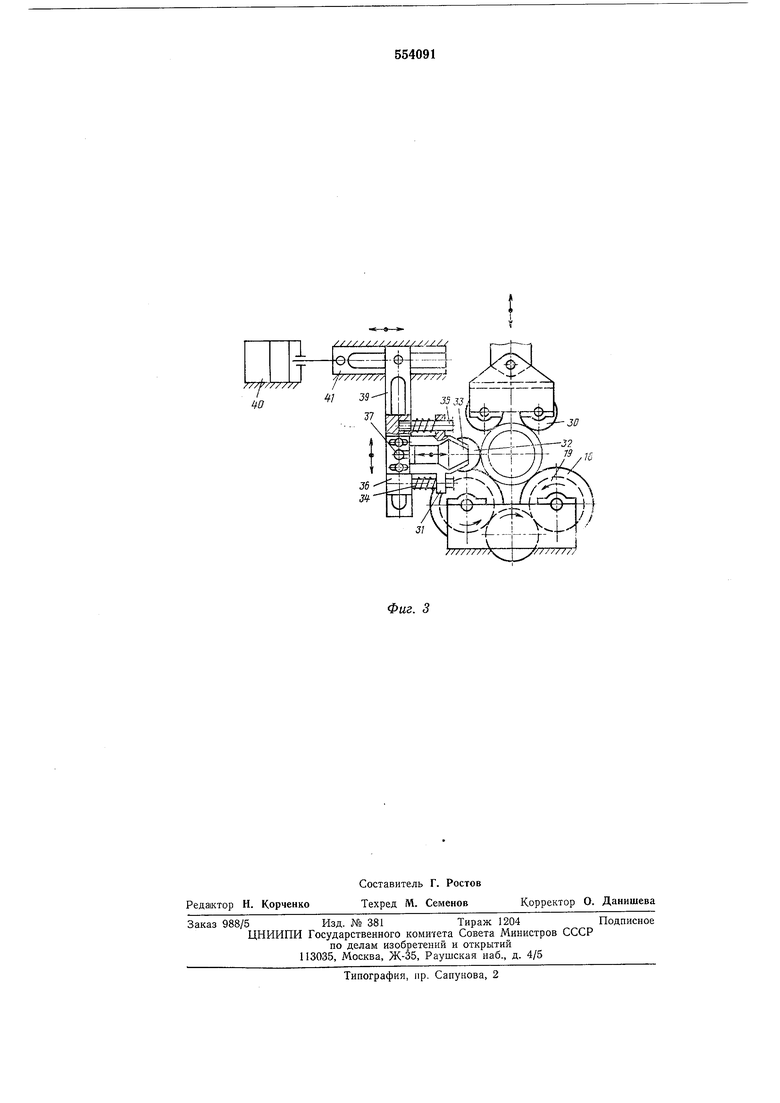
ми 34 на скалках 35, завернутых в корнускулачок 36, прижимаемый виитом 37 через кулачок 38 к направляющей 39, которая может перемещаться иод действием гидроцилиндра 40 в направляющей 41.
В передней части автомата расположен самоотводящийся упор, включающий гидроцилиндр 42, имеющий возможность перемещения в горизонтальном направлении на длину отрезаемой заготовки, который через штокрейку 43, шестерню 44, вал 45 и кронштейн 46 может отводить упор-толкатель 47, подпружиненный пружиной 48 и действующий на конечный выключатель 49, в верхнее положение.
Автомат содержит также станину-гидростанцию, электрощкаф, пульт управления, аппарат для воздушно-плазменной резки, стеллаж для загрузки труб.
Автомат работает следующим образом.
Нажатием на кнопку «Механизм подачи на пульте управления включается мотор-редуктор 1, который через цепную передачу 2 приводит в движение приводные ролики 3. Кнопкой «Гидропривод на пульте управления включается гидростанция, кнопкой «Плазмотрон - аппарат для воздушно-плазменной резки.
Труба с рядом стоящего стеллажа накатывается на неподвижные люнеты 8 механизма подачи. При нажатии на кнопку «Работа на пульте управления срабатывают гидроцилиндры 5, которые поднимают подвижную раму 4 с вращающимися приводными роликами 3, снимающими трубу с неподвижных люнетов 8.
Одновременно срабатывает гидроцилиндр 9 с подвижным роликом 10, настроенным на заданную высоту винтом 11, вследствие чего труба поджимается, движется вперед, нажимает на своем пути на упор-толкатель 47, подпружиненный пружиной 48, который через конечный выключатель 49 дает команду на возврат гидроцилиндров 5 и 9 в исходное положение, в результате чего подвижная рама 4 с вращающимися приводными роликами 3 и поджимной ролик 10 возвращаются в исходное положение, труба ложится на неподвижные люнеты 8, поддерживающие валки 12 и приводные ролики 19.
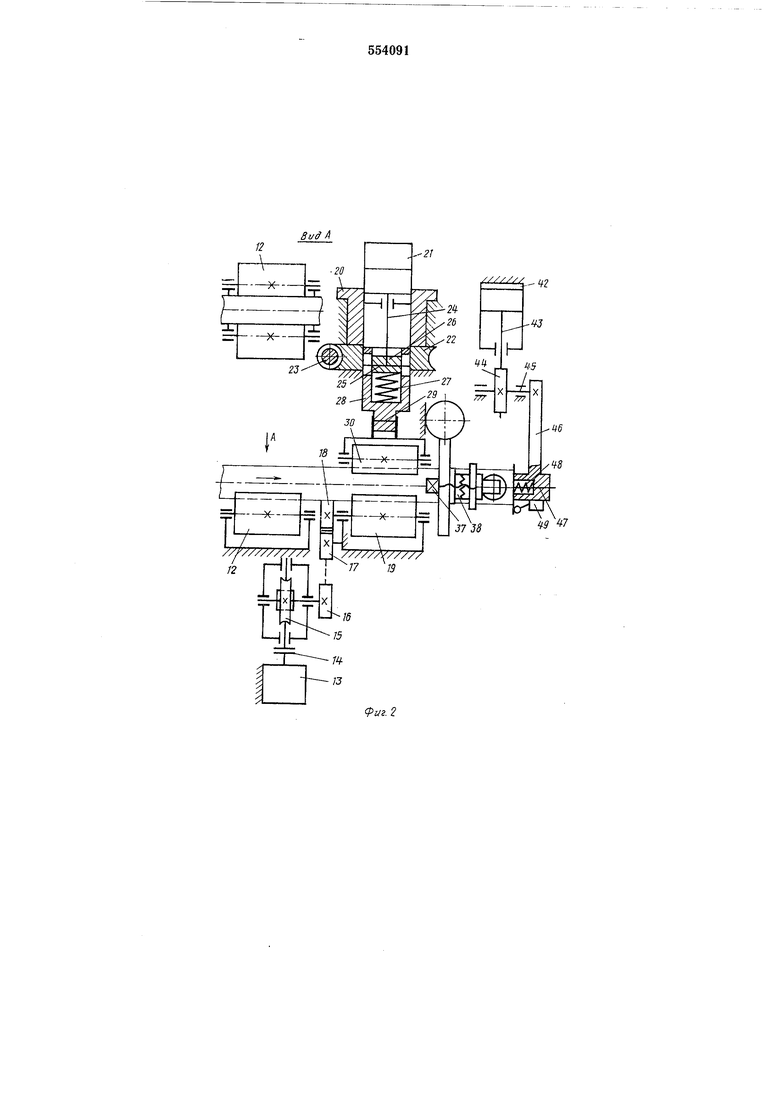
В то же время от конечного выключателя 49 поступает команда на гидроцилиндр 21, предварительно отрегулированный по высоте на заданный диаметр разрезаемой трубы червячным колесом-гайкой 22 и червяком наладки 23, который через шток 24, шарнир 25, подушку 26, пружину 27, полый шток 28 и шарнир 29 передает движение на ролики 30, прижимающие трубу к приводным роликам 19.
При опускании подвижной рамы 4 упор 6 нажимает на конечный выключатель 7, включающий гидродвигатель 13, который через муфту 14, червячную пару 15, шестерню 16, паразитную шестерню 17 и шестерню 18 приводит во вращение приводные ролики 19.
Одновременно поступает команда на гидроцилиндр 42, который через шток-рейку 43, шестерню 44, вал 45 и кронштейн 46 отводит унор-толкатель 47 в верхнее положение. В то же время от конечного выключателя 7
идет команда на гидродилиндр 40, который через направляющие 41 и 39, кулачки 38 и 36, скрепленные винтом 37, подает платформу 31 с закрепленным на ней резаком-плазмотроном 33, перемещающуюся на скалках 35
под воздействием пружин 34 до упора следящим роликом 32 в разрезаемую трубу, а так как плазмотрон включен, происходит резание. После этого через.программное реле времени подается команда «Выдержка на резание.
После окончания резания поступают команды; на гидроцилиндр 40-отвести резак-плазмотрон 33; на гидроцилиндр 21-отвести прижимные ролики 30; на гидроцилиндр 42- подвести упор-толкатель 47, а после небольшой паузы подается команда на гидроцилиндры 5 и 9 нодающего механизма. Далее цикл повторяется.
Применение платформы для механизма управления режущим инструментом со следящим роликом и с возможностью перемещения в горизонтальном и вертикальном направлениях в плоскости, перпендикулярной к оси трубы, а также обеспечение бесступенчатого регулирования скорости вращения трубы позволяют повысить качество реза.
Формула изобретения
Автомат для порезки толстостенных труб, содержащий станину, смонтированные на ней механизмы подачи, зажима и вращения разрезаемой трубы и режущий инструмент с механизмом его управления, отличающийся тем, что, с целью повышения качества резки, механизм управления режущим инструментом выполнен в виде платформы с возможностью перемещения в вертикальном и горизонтальном направлениях в плоскости, перпендикулярной к оси трубы, снабженной следящим роликом и гидроцилиндром, при этом механизм вращения трубы выполнен с возможностью бесступенчатого регулирования.
Вид А
12

| название | год | авторы | номер документа |
|---|---|---|---|
| Станок для резки длинномерного материала | 1987 |
|
SU1696177A1 |
| Станок для резки труб | 1987 |
|
SU1473909A1 |
| ПРЕСС СРАЩИВАНИЯ ДЛЯ ИЗГОТОВЛЕНИЯ КЛЕЕНОГО БРУСА | 2001 |
|
RU2180883C1 |
| Труборезный автомат | 1982 |
|
SU1055593A1 |
| Установка для зачистки проката | 1985 |
|
SU1424989A1 |
| Машина для термической резки с программным управлением | 1976 |
|
SU695774A1 |
| Линия для расфасовки жидкостей в бочки | 1974 |
|
SU520326A1 |
| Линия для оребрения труб методом спиральной навивки ленты | 1989 |
|
SU1690885A1 |
| Линия для спирального оребрения труб лентой | 1978 |
|
SU733760A1 |
| ФРЕЗЕРНЮ-ОТРЕЗНОЙ СТАНОК ДЛЯ ИЗМЕРЕНИЯ И ДЕЛЕНИЯ ЗАГОТОВКИ БЕЗ ОСТАТКА | 1973 |
|
SU382480A1 |

12
раг.2
W
////////
Фиг. 3
