(54) УСТРОЙСТВО ДЛЯ ДЕМОНТАЖА ИЗДЕЛИЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для демонтажа прессовых соединений | 1985 |
|
SU1315210A1 |
| Устройство для монтажа и демонтажа прессовых соединений | 1982 |
|
SU1057226A1 |
| Устройство для выпрессовки деталей типа вал-втулка | 1979 |
|
SU776844A1 |
| Способ демонтажа соединений и устройство для его осуществления | 1988 |
|
SU1620259A1 |
| Устройство для монтажа и демонтажа деталей типа втулок | 1984 |
|
SU1225750A1 |
| Устройство для монтажа и демонтажа крупногабаритных шин | 1990 |
|
SU1749060A1 |
| Сборочная резьбозавертывающая головка | 1980 |
|
SU921756A1 |
| Устройство для выпрессовки подшипников | 1980 |
|
SU941153A1 |
| СЪЕМНИК | 2004 |
|
RU2374042C2 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1989 |
|
RU2044620C1 |


1
Изобретение относится к машиностроению, в частности к устройствам для раэборки соединений с натягом .и может быть применено при разборке изделий значительной длины и малой жесткости, например, при ремонте электродвигателей.
Известны устройства для перемещения и демонтажа изделий, содержащие рычажны захват, шарнирно закрепленный на штоке силового цилиндра l . Известное устройство нельзя использовать для демонтажа изделий значительной длины и малой жесткости.
Наиболее близок к изобретению по технической сущности съемник для захвата и удаления деталей, содержащий установленную с возможностью вертикального перемещения головку, силовой ци.-андр и захват, выполненный в виде корпуса с зажимными губками и снабженный приводом, например силовым цилиндром 2 .
Недостатком известных устройств является трудность соосной установки захвата относительно извлекаемой детали, что не об
ходим о для предупреждения деформации, поломки или заклинивания последней.
Цель изобретения - обеспечение установки захвата соосно извлекаемой детали, и, следовательно, повышение эффективности демонтажа.
Для этого в корпусе захвата предлагаемого устройства размещены промежуточная штанга, установленная с возможностью поступательного перемещения и взаимодействующая со штоком привода захвата, и нажимная тяга, снабженная профилированными контактирующими с зажимными губками захвата поверхностями и шарнирно сочлеченная с промежуточной тягой,
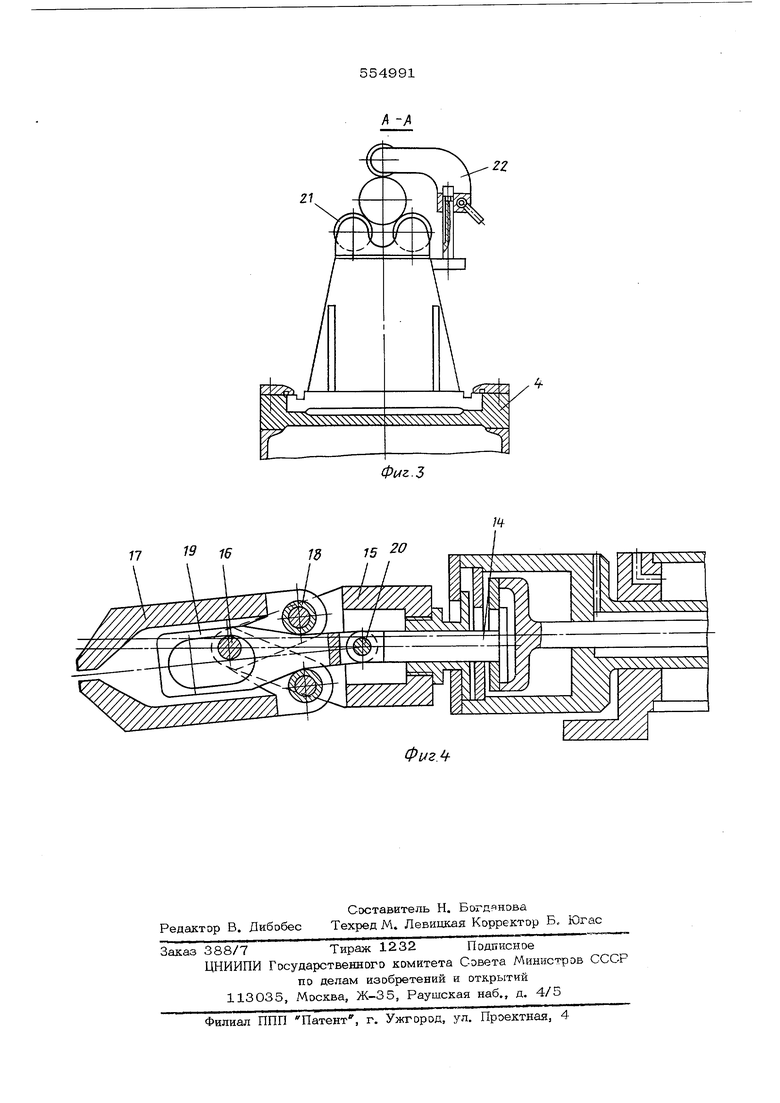
На фиг. 1 изображено описываемое устройство, общий вид; на фиг. 2 - захват, продольный разрез; на фиг. 3 - разрез А-А на фиг. 1; на фиг. 4 - схема расположения элементов захвата при компенсации несоосности.
На раме 1 устройства установлены неподвижная 2 и подвижная 3 стойки. Стойка 3 может поступательно перемещаться в направляющих 4, закрепленных на раме 1
и связана с силовым цилиндром, например гидроцилиндром 5. На раме установлена также головка 6, имеющая возможность вертикального перемещения, снабженная захватом 7 и винтовым упором 8 и связанная с силовым цилиндром, например гидроцилиндром 9. .На головке установлен силовой цилиндр 10с полым штоком 11. В полом штке 11 размещен привод захвата, вьгаолненный в виде подпружиненного поршня 12 со штоком 13, конец которого взаимодействуе с промежуточной штангой 14. На конце полого штока 11 закреплен корпус 15 захвата, в котором на оси 16 установлены зажимные губки 17, снабженные роликами 18. В корпусе 15 расположена нажимная тяга 19 с профилированными поверхностями, сочлененная с промежуточной штангой 14 шарниром 20 и взаимодействующая своими профилированными поверхностями с роликами 18 зажимных губок. На стойках 2 л 3 установлены роликоопоры 21, а на стойке 3 - прихват 22, предназначенные для установки и фиксации демонтируемого изделия 23, содержащего извлекаемые детали (на чертежах не показаны).
Устройство работает следующим образом Подвижная стойка 3 перемещается гид- родилиндром 5 в положение, определяемое длиной установочной базы изделия 23. Го- ловка 6 гидроцилиндром 9 перемещается в вертикальном направлении до уровня оси извлекаемой детали. Винтовой упор 8 выводят до соприкосновения с поверхностью демонтируемого изделия 23. При подаче
рабочей жидкости в правую полость цилиндра 10 поршень с полым штоком 11 перемещается влево, передвигая захват 7 к демонтируемому изделию.
Если оси извлекаемой детали к захвата 7 не совпадают, закват 7 с промежуточной штангой 14 устанавливают соос-но извлекаемой детали за счет зазоров в концах штоков 11, 13.
Если в данном случае не достигается требуемая соосность, тогда губки 17 поворачивают относительно оси 16, а нажимную тягу 19 - относительно шарнира 20. При подаче рабочей жидкости во внутреннюю полость полого штока 11, аток 13 с поршнем 12 отходит вправо. При этом нажимная тяга 19, перемещаясь относительно корпуса 15, взаимодействует с роликами 18 губок 17, и последние зажимают извлекаемую деталь. При подаче рабочей жидкости в левую полость цилиндра 10 полый шток 11 вместе с захватом 7 смещается вправо и извлекает деталь из демонтируемого издедия 23.
Формула изобретения
Устройство для демонтажа изделий, содержащее головку, закрепленный на ней силовой цилиндр с полым штоком, на конце которого смонтирован захват, вьгаолненный в виде корпуса с шарнирно закрепленными в нем зажимными губками, и установленный внутри полого штока привод захвата, вьшолненный в виде подпружиненного поршня со штоком, кинематически связанным с зажимньпии губками, отличающееся тем, что, с целью повышения эффективности демонтажа, в корпусе захвата размещены промежуточная штанга, связанная со штоком привода захвата, и шарнирно сочлененная с ней нажимная тяга, снабженная профилированными контактирующими с зажимными губками захвата поверхностями.
Источники информации, принятые во внимание при экспертизе:
№ 300294, М.Кл. В 23 Q 7/04, 1969.
№ 373127. М.Кл. В 23 Q 7/04, 1971. 12 23
21 19
22
Фиг.З
Фиг. 16
