556769
3
двигателем рабочего органа положено вычисление на основании уравнения регрессии требуемого параметра по косвенному показателю, а именно по олине обрабатываемой рыбы.
Целью изобретения является повышение точности обработки рыбы в процессе ее разделки.
Указанная цель достигается тем, что
устройство для автоматической настройки рабочих органов рыборазделочной машины, включающее блок для измерения параметра рыбы и систему управления исполнительным механизмом, содержащую генератор импуль сов и и1аговый двигатель, связанный посреством усилителя с выходом коммутатора, вход которого через коньюнктор и концевой Выключатель соединен с элементом задержк снабжено преобразователем кода, выход
которого соединен с входом вперед комм -татора, а блок для измерения параметра рыбы включает реверсивный счетчик импульсов и преобразователь непрерывной величины во временной интервал, при этом ко входу преобразователя кода подключены выходы реверсивного счетчика импульсов и через дополнительный конъюнкгор - выход генератора импульса, а преобразовател непрерывной величины во временной интервал соединен с дополнитель зым коньюнк- тором.
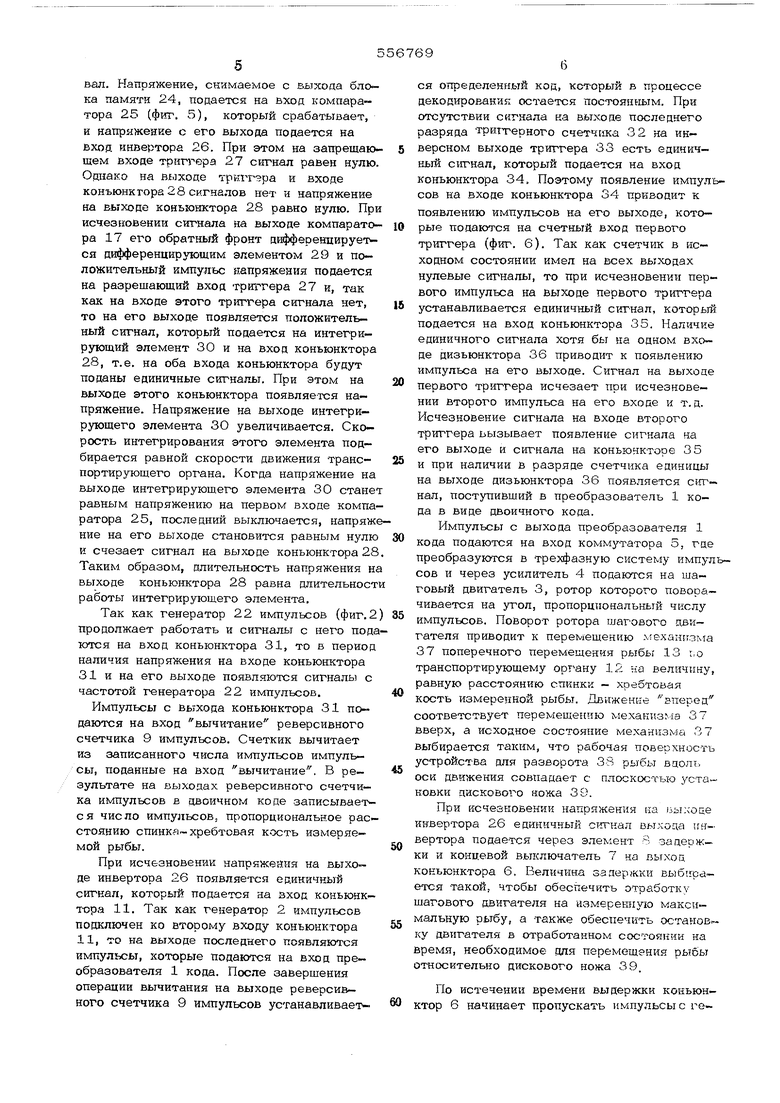
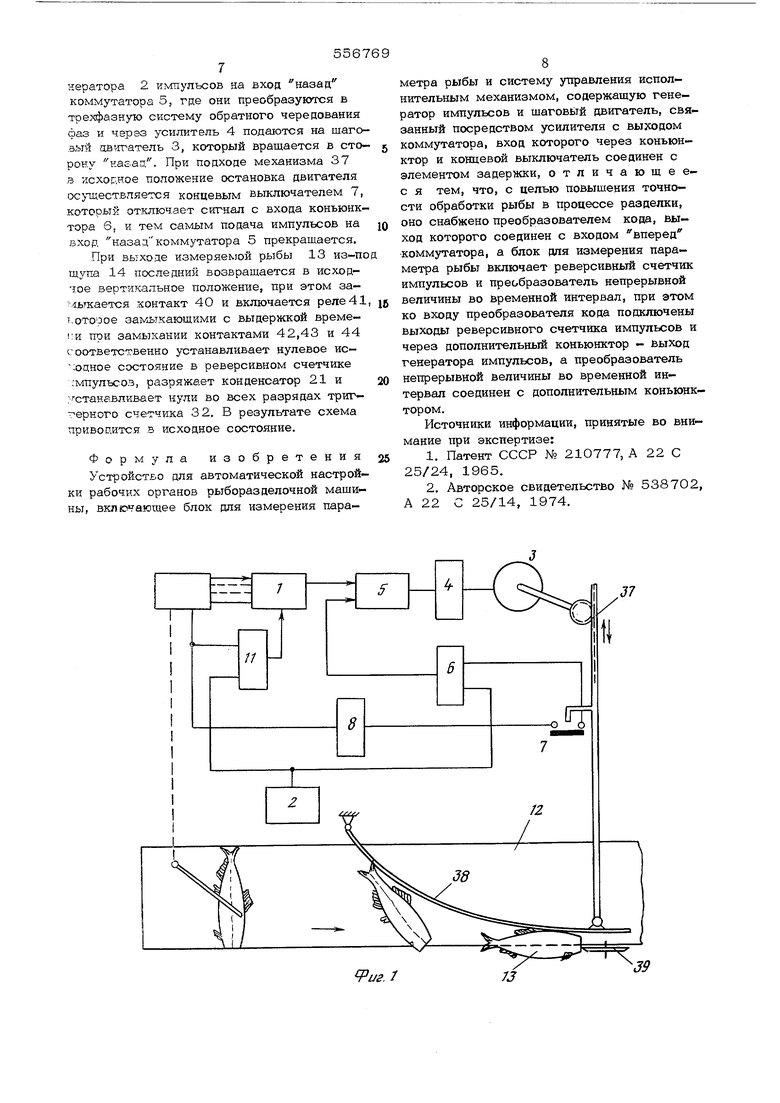
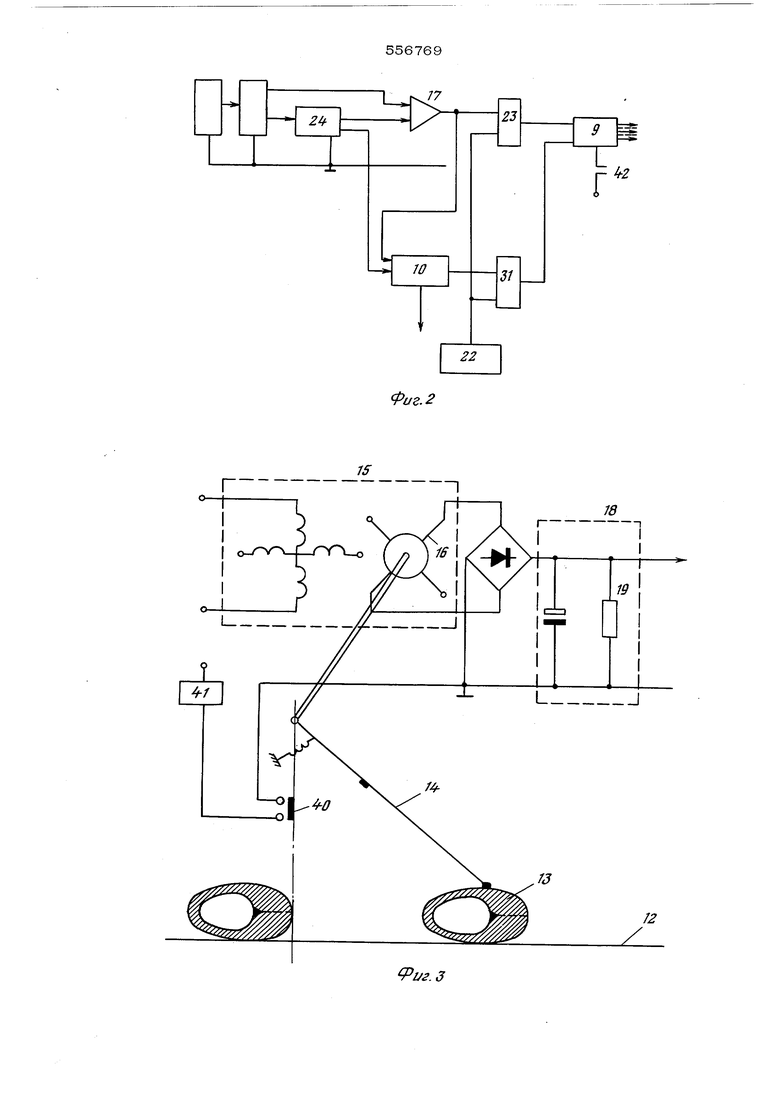
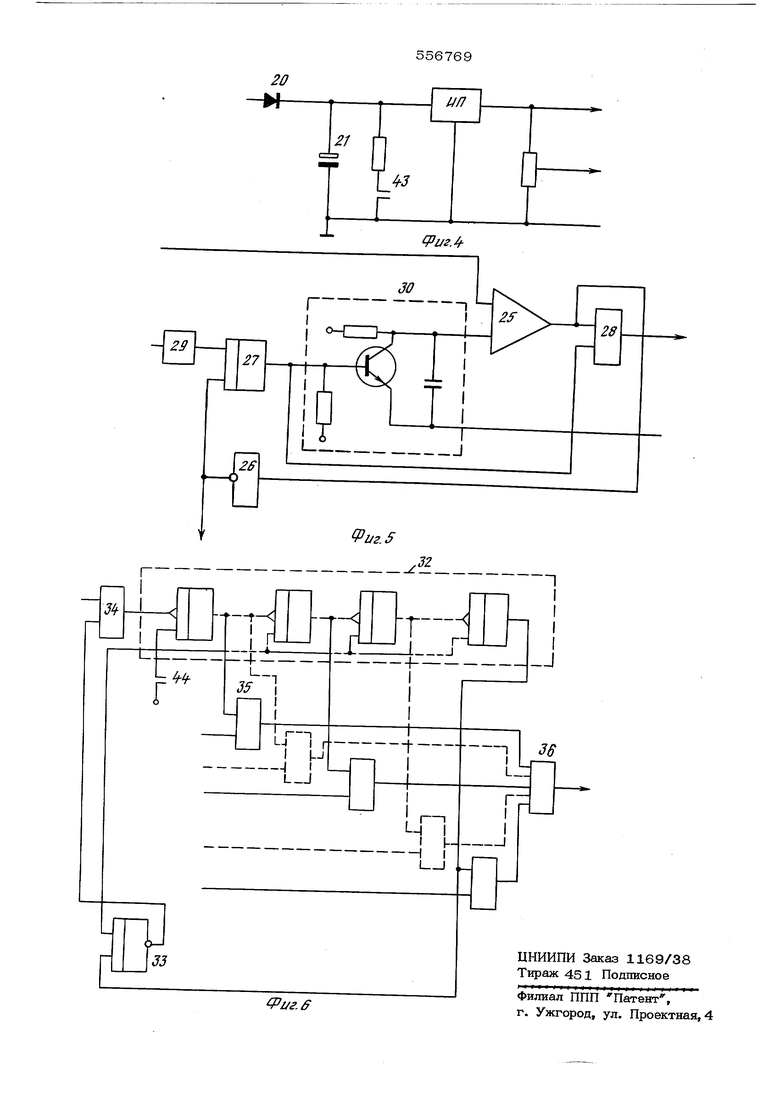
На фиг. 1 изображена структурно-принципиальная схема описываемого устройства на фиг. 2 - структурная схема блока для измерения параметра рыбы; на фиг. 3 - принципиальная схема преобразователя угла в электрический сигнал с фильтром (вращающийся трансформатор); на фиг. 4 - принципиальная схема блока памяти; на
фиг. 5 - структурно-принципиальная схема преобразователя непрерывной величины во временной интервал; на фиг. 6 - принципиальная схема преобразователя кода.
Устройство для автоматической настрой- ки рабочих органов рыборазделочной машины включает преобразователь 1 кода, систему управления исполнительным механизмом, содержащую генератор 2 и myльcoв и шаговый двигатель 3, связанный посредством усилителя 4 с выходом коммутатора 5 вход которого через коньюнктор 6 и концевой выключатель соединен с элементом 8 задержки, и блок для измерения параметра рыбы, включающий реверсивный чик 9 импульсов и преобразователь 10 непрерывной величины во временной интервал , при этом к входу преобразователя 1 ко- ца подключены выходы реверсивного счетчика 9 импульсов и через дополнитель-
4
ный коньюнктор 11 - выход генератора 2 импульсов, а преобразователь 10 непрерывной величины во временной интервал соединен с дополнительным коньюнктором 11. Устройство работает следующим образом
При движении транспортирующего органа 12 со строго постоянной скоростью рыба 13 спинкой касается шутта 14 в его исходном вертикальном положении. По мере движения рыбы щуп 14 отклоняется на некоторый угол и в наивысшей точке, соот ветствующей залеганию хребтовой кости рыбы, щуп отклоняется на максимальный угол.
В исходном положении, до начала измерения, щуп находится в вертикальном положении,, напряжение на выходе вращающегос трансформатора 15 равно нулю. При отклонении щупа напряжение на выходе синусной обмотки 16 увеличивается по закону синус Так как первый вход компаратора 17 (фиг. 2) соединен с выходом фильтра 18, то компаратор срабатывает при незначительном угле поворота щупа. На выходе компаратора устанавливается постоянное по величине напряжение. Напряжение, снимаемое с потенциометра 19 фильтра 18 подается через диод 20 на конденсатор 21, причем из-за наличия постоянной времени заряда конденсатора напряжение на нем несколько отстает от напряжения, снимаемого с потенциометра 19, На выходе истокового повторителя ИП (фиг.4) появляется напряжение, пропорциональное напряжению по конденсатору 21, которое подается на второй вход компаратора 17. При равенств ве напряжений на входах компаратора последний отключается и напряжение на его выходе становится равным нулю, т.е. время включенного состояния компаратора 17 соответствует времени от начала измерения до достижения щупом максималького угла в точке наибольшей толщины рыбы. Так как генератор импульсов 22 работает с постоянной частотой, то при наличии напряжения на входе коньюнктора 23 на ег выходе появляется импульсный сигнал с числом импульсов, пропорциональным времени от начала измерения до достижения щупом максимального угла.
Полученные на выходе коньюнктора 23 импульсы подаются на вход сложение реверсивного счетчика 9 импульсов, где в двоичном коде записывается число поданных на счетчик импульсов. Преобразование величины, пропорциональной синусу максимального угла, во временной интервал производится с помощью преобразователя 10 непрерывной величины во временной интервал. Напряжение, снимаемое с выхода блока памяти 24, подается на вход компаратора 25 (фиг. 5), который срабатывает, и напряженке с его выхода подается на вход инвертора 26. При этом на запрещаю щем входе тригг ера 27 сигнал равен нулю Однако на Bf.ixoae триггера и входе конъюнкгора 28 сигналов нет и напряжение на выходе коньюнктора 28 равно нулю. Пр исчезновении сигнала на выходе компарато ра 17 его обратный фронт дифференцируется дифференцирующим элементом 29 и положительный импульс напряжения подается на разрешающий вход триггера 27 и, так как на входе этого триггера сигнала нет, то на его выходе появляется положительный сигнал, который подается на интегрирующий элемент 30 и на вход коньюнктора 28, т.е. на оба входа коньюнктора будут поданы единичные сигналы. При этом на выходе этого коньюнктора появляе-гся напряжение. Напряжение на выходе интегрирующего элемента ЗО увеличивается. Скорость интегрирования этого элемента подбирается равной скорости движения транспортирующего органа. Когда напряжение на выходе интегрирующего элемента 30 стане равным напряжению на первом входе компа ратора 25, последний выключается, напряж ние на его выходе становится равным нулю и счезает сигнал на выходе коньюнктора 28 Таким образом, длительность напряжения н выходе коньюнктора 28 равна длительност работы интегрирующего элемента. Так как генератор 22 импульсов (фиг. 2 продолжает работать и сигналы с него под ются на вход коньюнктора 31, то в период наличия напряжения на входе коньюнктора 31 и на его выходе появляются сигналы с частотой генератора 22 импульсов, Импульсы с выхода коньюнктора 31 подаются на вход вычитание реверсивного счетчика 9 импульсов, Счеткик вычитает из записанного числа импульсов импульсы, поданные на вход вычитание. В ре- зультате на выходах реверсивного счетчика импульсов в двоичном коде записывается число импульсов, пропорциональное рас стоянию спинка-хребтовая кость измеряемой рыбы. При исчезновении напряжения на выходе инвертора 26 появляется единичный сигнал, который подается на вход коньюнк7-ора 11. Так как генератор 2 импульсов подключен ко второму входу коньюнктора 11, то на выходе последнего появляются импульсы, которые подаются на вход преобразователя 1 кода. После завершения операции вычитания на выходе реверсивного счетчика 9 импульсов устанавливается огфеделенный код, который в процессе декодирования остается постоянным. При отсутствии сигнала ка выходе последнего разряда тритт ерного счетчика 32 на инверсном выходе триггера 33 есть единичный сигнал, который подается на вход коньюнктора 34, Поэтому появление импульсов на входе коньюнктора 34 приводит к появлению импульсов на его выходе, которые подаются на счетный вход первого триггера (фиг. 6). Так как счетчик в исходном состоянии имел на всех выходах нулевые сигналы, то при исчезновении первого импульса на выходе первого триггера устанавливается единичный сиг-нал, который подается на вход коньюнктора 35, Наличие единичного сигнала хотя бы на одном входе дизьюнктора 36 приводит к появлению импульса на его выходе. Сигнал на выходе первого триггера исчезает при исчезновении второго импульса на его входе и т.д. Исчезновение сигнала на входе второго триггера вызывает появление сигнала на его выходе и сигнала на коньюнкторе 35 и при наличии в разряде счетчика единицы на выходе дизьюнктора 36 появляется сигнал, поступивший в преобразователь 1 кода в виде двоичного кода. Импульсы с выхода преобразователя 1 кода подаются на вход коммутатора 5, где преобразуются в трехфазную систему импульсов и через усилитель 4- подаются на шаговый двигатель 3, ротор которого поворачивается на угол, пропорциональный числу импульсов. Поворот ротора шагового двигателя приводит к перемещению механгтзма 37 поперечного перемещения рыбы 13 t,o транспортирующему органу 12 на величину, равную расстоянию спинки - хребтовая кость измеренной рыбы. Движение вперед соответствует перемещению Iexaниз lЭ 37 вверх, а исходное состояние механизма 37 выбирается таким, что рабочая ттоверхность устройства для разворота 38 рыбы вцот, оси движения совпадает с алоскостью Зстановки дискового йожа 39. При исчезновении напряжения ка libixoee инвертора 26 единичный сигнал выхоца инвертора подается через элемент 8 задержки и концевой выключатель 7 на выход коньюнктора 6. Величина задержки выбирается такой, чтобы обеспечить отработку шагового двигателя на измеренную максимальную рыбу, а также обеспечить остановку двигателя в отработанном состоянии на время, необходимое для перемещения рыбы относительно дискового ножа 39. По истечении времени выдержки коньюнктор 6 начинает пропускать импульсы с генератора 2 импульсов на вход назад коммутатора 5, где они преобразуются в трехфазную систему обратного чередования фаз и через усилитель 4 подаются на шаговый цвиггатель 3, который вращается в сто- рон.у нагац. При подходе механизма 37 3 исхор.ное положение остановка двигателя 1х; тцествляется концевым выключателем 7, который отключает сигнал с входа коньюнктора 6, и тем самым подача импульсов на вход назад коммутатора 5 прекращается.
При выходе измеряемой рыбы 13 из-по щупа 14 последний возвращается в исходчое вертикальное положение, при этом за- тыкается контакт 40 и включается реле 41 (.отоэое замыкающими с выдержкой време ;и при замыкании контактами 42,43 и 44 соответственно устанавливает нулевое ис- ;оаное состояние в реверсивном счетчике :мпулъсоз, разряжает конденсатор 2.1. vi устанавливает нули во всех разрядах тригт ерного счетчика 32. В результате схема приводится в исходное состояние.
Формула изобретения Устройство для автоматической настройки рабочих органов рыборазделочной мащины, включ ающее блок для измерения параметра рыбы и систему управления исполнительным механизмом, содержащую генератор импульсов и щаговый двигатель, связанный посредством усилителя с выходом коммутатора, вход которого через коньюнктор и концевой выключатель соединен с элементом задержки, отличающеес я тем, что, с целью повыщения точности обработки рыбы в процессе разделки, оно снабжено преобразователем кода, выход которого соединен с входом вперед коммутатора, а блок для измерения параметра рыбы включает реверсивный счетчик импульсов и преобразователь непрерывной величины во временной интервал, при этом ко входу преобразователя кода подключены выходы реверсивного счетчика импульсов и через дополнительный коньюнктор - выход генератора импульсов, а преобразователь непрерывной величины во временной интервал соединен с дополнительным коньюнктором.
Источники информации, принятые во внимание при экспертизе:
1.Патент СССР № 210777, А 22 С 25/24, 1965.
2.Авторское свидетельство № 538702 А 22 С 25/14, 1974.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматической настройки рабочих органов рыборазделочной машины | 1975 |
|
SU659125A1 |
| Устройство для настройки рабочих органов рыборазделочной машины | 1976 |
|
SU682207A1 |
| Рыборазделочная машина | 1973 |
|
SU506368A1 |
| Устройство для настройки рабочих органов рыборазделочной машины | 1978 |
|
SU740213A1 |
| Устройство для управления рабо-чиМи ОРгАНАМи РыбООбРАбАТыВАющЕйМАшиНы | 1979 |
|
SU835401A1 |
| Устройство для управления рабочими органами рыборазделочной машины | 1978 |
|
SU736932A1 |
| Устройство для настройки рабочих органов однооперационной рыборазделочной машины | 1974 |
|
SU538702A1 |
| Устройство для настройки рабочих органов рыборазделочной машины | 1976 |
|
SU721060A2 |
| Цифровой регулятор частоты вращения | 1988 |
|
SU1552148A1 |
| Устройство для настройки рабочего органа однооперационной рыборазделочной машины | 1974 |
|
SU613748A1 |
//г /
Фиг. 2
ш.З
20 Ж
