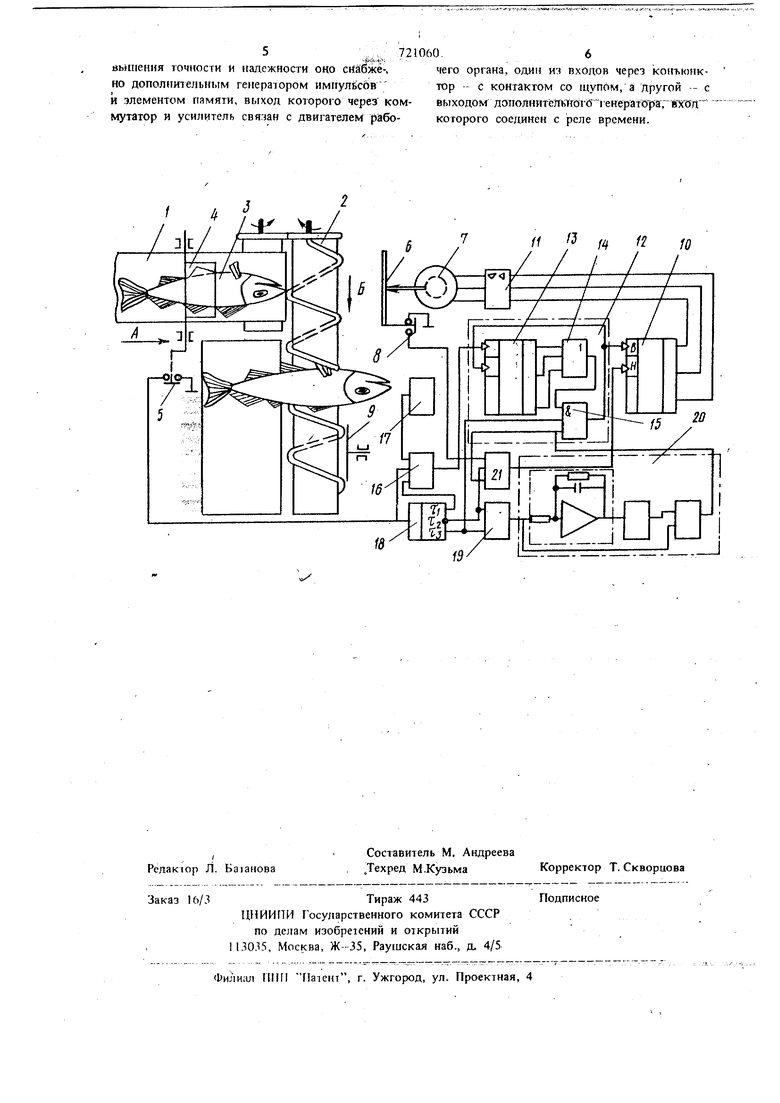
(54) УСТРОЙСТВО ДЛЯ НАСТРОЙКИ РАБОЧИХ ОРГАНОВ РЫБОРАЗДЕЛОЧНОЙ МАШИНЫ ro органов. Над конвейером 1 расположен , В1.1полнеинын в виде шторки 4, снабженной контактом-микровьгключагелем 5. Перемещение рыбы по стрелке А ограничивает упорная апапка 6, связанная с двигателем 7 рабочего органа, концевым выключателем 8, входящим в решающую схему. Последняя рассчигывае величину необходимого переме1це шя упорной планки 6 перед контактом с ней рыбы при движении последней по стрелке А. В устройство входят также нож 9, комм татор 10 с усилителем 11, к выходу которого подключен шаговый двигагель 7. Вход вперед (В) коммутатора 10 подключен к выходу элемен1а ) 2 памяти, который состоит из реверсивного двоичного счетчика 13, дизъюнкчора 14 и конъюнктора 15. Вход за1ШСИ элемента 12 памяти (вход сложение счетчика 13) через конъюктор 1б подключен к генераюру 17 импульсов стабильной частоты к микровыключателю 5. Путем настройки час тоты следования импульсов от генератора 17 можно задавать различные значения коэффициентов, связывающих длину рыбы с длиной ее головы. В результате устранена узкая специализация устройства по породам рыбы. Эле мент 18 задержки выполняет роль командного устройства, запускающего в работу преобразователь 12, через дизъюнктор 19 - до полнительный генератор 20 импульсов и через конъюнктор 21 - коммутатор 10, который обеспешвает обратное движение упорной план ки 6. Дополнительньш генератор 20 содержит последовательно включенные интегратор 22, управляемый генератор 23 и конъюнктор 24 и обеспечивает подачу на входы конъюнкторов 15 и 21 импульсов, частота которых меняется по экспоненциальному закону. Тем самым дополнительный .генератор20 позволяет осуществить плавный пуск щагового двигателя без потери шага, что повыщает надежность системы автоматической настройки и позволяет лучше использовать динамические характеристики щагового Двигателя,. Устройство работает следующим образом. Рыба 3, уложенная на конвейер 1, движется по стрелке А, подходит под шторку 4 и Пр11поднимает ее. При этом контакт 5 размь кается. При размыкании контакта 5 запускается в работу элемент 18 задержки и через дизъюнктор 19 - генератор 20. В результате выход генератора 20 подключается на время через конъюрктор 21 к входу назад коммутатора 10 двигателя 7. Двигатель возвра11цает упорную планку 6 в исходное состо two, которое соответствует длиЯе головы B0; ;-чj;to; cHO наименьшего экземпляра рыбы. В исходном состоянии контакт 8 заШТкаётся 4 и подача импульсов на коммугатор И) прекрашаегся. Через время х сигналом с элемента 18 задержки импульсы с генератора 17 через конъюнктор 16 начинают поступать на вход сложение счетчика 3, заполняя его. Время -х задержки, соответствует длине головы возможно наименьшего экземпляра рыбь, поступающей на обработку, поэтому в слу обработки такого экземпляра счетчик 13 останетс в нулевом состоянии. Через время t подается единичный сигнал с элемента 18 на Конъюнктор 15 и через дизъюнктор 19 - на дополнитель(ый генератор 20. Время t соответствует времени возвращения рабочего органа (упорной планки 6) из положения, которое он занимал при обработке самого крупного экземпляра рыбы, в исходное положение. Импульсы с дополнительного генератора 20 через конъюнктор 15 поступают на вход вычитание реверсивного счетчика 13и на вход вперед коммутатора 10. Двигатель 7 перемещает упорную планку 6. Движение планки 6 происходит до тех пор, пока все .количество, импульсов, записанное в счетчике 13, не будет передано на коммутатор 10, т.е. пока счетчик 13 не возвратится в исходное нулевое состояние. Действительно, в этом случае на выхоПах счётчика 13 и на дизъюнкторе 14 будут нулевые сигналы, и конъюнктор 15 не пропустит импульсы с генератора 20 на коммутатор 10. В дальнейшем рыба поступает на конвейер 2, упирается в настроенную упорную планку 6 и, двигаясь по стрелке Б, попадает под нож 9. С приходом следующей рыбы цикл обработки повторяется. Таким образом, в описываемом устройстве оптимизируется режим работы двигателя, а именно, становится более надежной (без пропуска шага) его работа и в то же время полнее используются его скоростные возможности.Эти ми же самыми средствами удалось совместить процесс возврата упорной планки в исходное состояние, т.е. холостой ход исполнительного органа, с процессом измерения длины рыбы, чем фактически устранены затраты рабочего времени на холостой ход. Все это позволяет существенно повысить такие технико-экономические характеристики, как производительность устройства (на 20- 30%), а также точность и надежность его работы, т.е. качество получаемой продукции. Формула изобретения Устройство для настройки рабочих органов рыборазделочной маШиНы по авт.св. N 659123, отличающееся тем, чю, с црлью по5,, 721060.6
вышення гочиости и .садсжности оно .чего органа, один т входов через конъюнкно дополнительным генераюром имггулБсов-тор - с контактом со щупом, а другой - с
и элементом памяти, выход которого через ком- выходом ло1юлнИте7П,тгого---гетера1ора-ГхШ-мутатор и усилитель связан с двигателем рабо-которого соединен с реле времени
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматической настройки рабочих органов рыборазделочной машины | 1975 |
|
SU659125A1 |
| Устройство для настройки рабочих органов однооперационной рыборазделочной машины | 1974 |
|
SU538702A1 |
| Устройство для настройки рабочего органа однооперационной рыборазделочной машины | 1974 |
|
SU613748A1 |
| Устройство для настройки рабочих органов рыборазделочной машины | 1976 |
|
SU682207A1 |
| Рыборазделочная машина | 1973 |
|
SU506368A1 |
| Устройство для настройки рабочего органа рыборазделочной машины | 1974 |
|
SU611600A1 |
| Устройство для автоматической настройки рабочего органа рыборазделочной машины | 1980 |
|
SU921493A1 |
| Устройство для управления рабо-чиМи ОРгАНАМи РыбООбРАбАТыВАющЕйМАшиНы | 1979 |
|
SU835401A1 |
| Устройство для отрезания головы рыбы | 1975 |
|
SU599785A1 |
| Устройство для настройки рабочих органов рыборазделочной машины | 1978 |
|
SU740213A1 |
, /jJfVVtV /Г / IH 12 fo //III
