(54) УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО АДРЕСОВАНИЯ ТРАНСПОРТНОГО СРЕДСТВА
остей и зависимости с заданным, то ограничивает применение устройтва и усложняет работу блока управления исполнительными механиз 1ми, особенно в динамических режимах пуска и торможения и при использовании транспортных средств и приводов с различными динамическими характеристиками.
Целью изобретения является упрощение и повышение гибкости настройки в зависимости от динамических характеристик привода и транспортного средства.
Поставленная цель достигается тем, что в устройство для автоматического ёщресования транспортного средства,, содержащее датчики обратной связи, блок задания адреса, блок записи заданной позиции, блок памяти исходной позиции, блок управления исполнительными механизмами, два элемента И, элемент ИЛИ, блок сравнения, информационные входы которого соединены соответственно с выходами блока памяти исходной позиции и блока записи заданной позиции, входы которых соединены соответственно с выходом первого и второго элементов И, управляющий выход Вперед
блока сравнения подключен к
первым входам первого элемента И и блока упразления исполнительными механизмами, второй вход которого и первый вход второго элемента И соединены с управляющим выходом Назад блока сравнения, управляющие входы блока задания адреса и датчиков обратной связи подключены к управляющему входу устройства, введены две группы элементов И, генератор тактовых импульсов и блок упреждения переключением скоростей, выходы которого соединены соответственно с входами блока управления исполнительными механизмами, вход блока упреждения переключением скоростей подключен к выходу элемента ИЛИ, входы которого соединены с выходами первого и второго элементов И, первые входы элементов И первой
и второй группы соединены с первым выходом генератора тактовых импульсов, вторые входы элементов И первой группы соединены соответственно с выходами датчиков обратной связи, а выходы подключены соответственно к информационным входам блока памяти исходной позиции, вторые входы элементов И второй группы соединены соответственно с выходами блока згщания адреса, а выходы подключены соответственно к информационным входс1м блока записи заданной позиции, управляющий выход Стоп блока сравиения подключен к управляющему входу блока управления исполнительными механизмами, второй выход
генератора тактовых импульсов соединен с вторыми входами первого и второго элементов И, третий выход подключен к входам блока памяти исходной позиции, блока записи заданной позиции, блок управления исполнительными механизмами и блока упреждения переключением скоростей, четвертый выход генератора тактовых импульсов соединен с синхронизирующим входом блока управления исполнительными механизмами. Кроме того, блок упреждения переключением скоростей содержит счетчик скоростей и дешифратор, выходы которого являются выходами блока, входы дешифратора соединены с выходами счетчика скоростей,, счетный вход которого является входом блока, а тактовый вход является тактовым входом блока
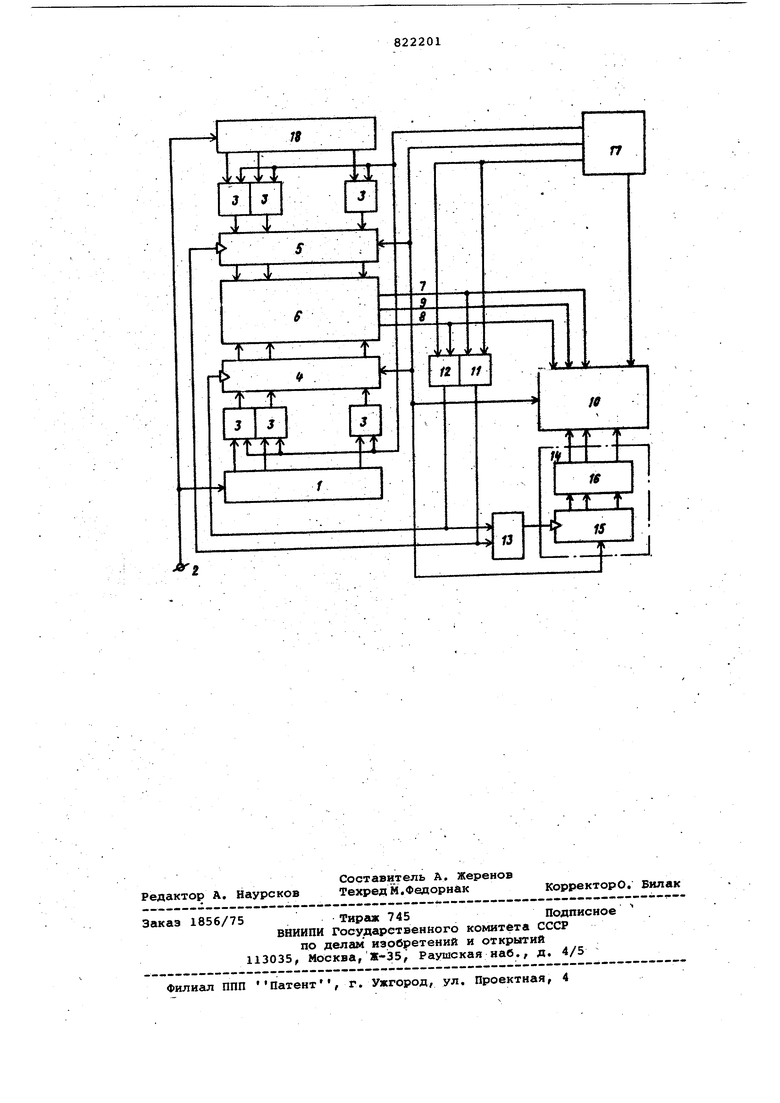
На чертеже представлена схема устройства.
Устройство содержит блок 1 задания адреса, управляющий вход 2 устройства, группы элементов ИЗ, блок 4 записи заданной позиции, блок 5 памяти исходной позиции, бло 6 сравнения, управляющие выходы Вперед , Назад , Стоп 7, 8, и 9 блока б, блок 10 управления исполнительными механизмами, элементы И 11 и 12, элемент ИЛИ 13, блок 14 упреждения переключением скростей со счетчиком 15 скоростей и дешифратором 16, генератор 17 тактовых импульсов, датчики 18 обратной связи.
При кодовом методе определения координат датчики обратной связи могут содержать логическую схему, состоящую из входных шин, подключенных к одноименным разрядам бесконтактных датчиков истинного положения, расположенных в двоичном коде, коде Грея или коде Фибоначчо и К выходных шин или двоично-десятичном подключенных ко входам элементов И.
Датчики Обратной связи при числоимпульсном методе определения координат могут содержать реверсивный счетчик, датчики, элементы. ИЛИ, И и триггер исходного положения.
Устройство работает следующим образом.
При включении питания сигналом Сброс с выхода генератора 17 тактовых импульсов блок 4 записи заданной позиции, блок 5 Пс1мяти исходной позиции и блок 14 упреждения переключением скоростей устанавливаются в начальное состояние.
На выходе 9 блока 6 сравнения формируется команда Стоп. По команде Пуск со входа 2 устройства на выходах датчиков 18 обратной связи формируется двоичный код, постоянно присутствующий на входах элементов И 3, в блоке 1 задания адреса формируется двоичный код гщреса позиции. По сигналу с выхода генератора 17 тактовых импульсов командой Запуск через раздельные входы блока 4 и 5 записывается требуемый и исходный адрес кранаштабелера. Блок 6 сравнения, опр деляет. какой из адресов меньше Допустим, величина заданной адресной позиции по абсолютному значению превышает величину исходной адресной позиции. В этом случае на выходе 7 блока 6 сравнения появляется сигнал Вперед i Он поступает на вход блока .10 управления исполйительными механизмами и по сигналу синхронизации включает привод исполнительного механизма по движению Вперед, о крыва ется элемент И 11, и тактовые импульсы с выхода блока 17 поступаю на вход блока 5 памяти исходной позиции. Это будет происходить до тех пор, пока состояние блока 5 не будет полностью соответствовать состоянию блока 4 записи заданной позиции. Тактовые импульсы блока 17 с выхода элемента И 11 через элемент ИЛИ 13 поступают на вход счетчика 15скоростей. Абсолютное значение в счетчике скоростей будет соответствовать разности заданной и исходной позици В зависимости от состояния счетчика 15. скоростей на выходах дешифр тора 16 формируются команды на переключение скорости за любое числ позиций с любым необходимым упрежде нием. Необходимое упреждение скорости устанавливается в зависимости от динамических характеристик кранаштабелера в режимах пуска и торможения .. С одного из выходов дешифратора 16команда на пер еключение скорости по сигналу Сброс с выхода генератора 17 тактовых импульсов записывается в блок 10 и включает привод исполнительного механизма на движение со скоростью, определяе мой необходимым упреждением. ПослеСбросдующими сигношами навливаются блоки 5, 4 и 15, команда на переключение скорости переписывается в блок 10, сигнсШами с выходов генератора 17 устанавливают ся адреса заданной и исходной пози1ЦИЙ, переписывается в блок 10 управ |ления исполнительными механизмами направление движения. Это будет про исходить до тех пор, пока кран-штабелер не достигнет заданного адреса записанного в блоке 4. При достижении краном-штабелером заданного адреса исчезнет сигнал Впереди на выходе блока б срав нения появится сигнал Кран-штабелер остановится у заданного адреса. В случае,если величина адресной позиции меньше величины исходной, на выходе 8 блока 6 сравнения появляется сигнал Назад. Этот сигнал открывает элемент И 12 и включает привод исполнительного механизма на движение назад. В блоке 14 упрежд ния переключением скоростей форми- С руется сигнал переключения скорости. При прохождении крана-штабелера мимо адресных позиций, с датчиков обратной связи в блок 5 памяти исходной позиции записываются текущие адреса транспортного средства. Каждое новое состояние блока 5 сравнивается с блоком 4 записи заданной позиции. При достижении краном-штабелером заданного адресачисло, записанное в блок 4, станет равным числу, записанному в блок 5, Сигнал Назад на выходе 8 блока 6 сравнения снимается , счетчик 15 скоростей устанавливается в нулевое состояние, привод Назад выключается, снимается скорость, кранштабелер останавливается у заданного адреса. ., Таким образом, предлагаемое устройство позволяет автоматически адресовать кран-штабелер и автоматически переключать скорости движения исполнительных механизмов крана-штабелера в зависимости от величины упреждения между заданным и требуемым положением крана-штабелера, что значительно упрощает управление краном-штабелером,особенно при пуске и торможении. Кроме того, устройство обладает большей помехозащищенностью к сбоям по сравнению с известными устройствами, так как считывание информации о заданном и истинном положении кранаштабелера происходит в динамике с определенной периодичностью. Формула изобретения 1. Устройство для автоматического адресования транспортного средства, содержащее датчики обратной связи, блок задания адреса, блок записи заданной позиции, блок памяти исходной позиции, блок управления сполнительными механизмами, два элемента И, элемент ИЛИ, блок сравнения, информационные входы которого оединены соответственно с выходами блока памяти исходной позиции и лока записи заданной позиции, входы оторых соединены соответственно выходом первого и второго элеменов И, управляющий выход Вперед . лока сравнения подключен к первым ходам первого элемента И и блока правления исполнительными механизами, второй вход которого и первый ход второго элемента И соединены
с управляющим выходом Назад блока сравнения, управляющие входы блока задания адреса и датчиков обратной связи подключены к управляющему входу устройства, отличающееся тем, что, с целью упрощения и повышения гибкости настройки, в зависимости от динамических характеристик привода и транспотного средства, в него введены две группы элементов И, генератор тактовых импульсов и блок упреждения переключением скоростей, выходы которого соединены соответственно с входами блока управления исполнительными механизмами, вход блока упреждения переключением скоростей подключен к выходу элемента ИЛИ, вхды которого соединены с выходами первого и второго элементов И, первые входы элементов И первой и второй группы соединены с первьйл выходом генератора тактовых импульсов, вторые входы элементов И первой группы соединены соответственно с выходами датчиков обратной связи, а выходы подключены соответственно к информационным входам блока памяти исходной позиции, вторые входы элементов И второй группы соединены соответственно с выходами блока задания адреса, а выходы подключены соответственно к информационным входам блока записи заданной позиции, управляющий выход Стоп блока сравнения подключен к управляющему
входу блока управления исполнительными механизмами, второй выход генератора тактовых импульсов соединен с вторыми входами первого и второго элементов И, третий выход подклю, чен к входам установки блока памяти исходной позиции, блока записи заданной позиции, блока управления исполнительными механизмами и блока упреждения переключением скоростей,
четвертый выход генератора тактовых импульсов соединен с синхронизирующим входом блока управления исполнительными механизмами.
2. Устройство по п. 1, о т л ичающеёся тем, что блок упреждения переключением скоростей содержит счетчик скоростей и дешифратор, которого являются выходами блока, входы дешифратора соединены с выходами счетчика скоростей, счетный
0 вход которого является входом блока, а тактовый вход . является тактовым входом блока. .
Источники информации, 5 принятые so внимание при экспертизе
1.Анисимов Д.В. и др. Принципы построения устройств сравнения и формирования команд управления движением крана-штабелера, - Механизация и автоматизация производства .
0 1978, № 12, с. 23-26.
2.Авторское свидетельство СССР № 468562, Кл. G 06 F 15/50, 1973 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического адресования транспортного средства | 1984 |
|
SU1229778A1 |
| Устройство для автоматического адресования транспортного средства | 1973 |
|
SU468562A1 |
| Устройство для программного управления краном-штабелером | 1982 |
|
SU1070509A1 |
| Устройство для управления приводом кранштабелера | 1984 |
|
SU1193690A1 |
| Устройство для автоматического адресования транспортных средств | 1982 |
|
SU1027737A1 |
| Устройство для программного управления | 1982 |
|
SU1067470A1 |
| Устройство для управления краном-штабелером | 1988 |
|
SU1558822A1 |
| Устройство для автоматического адресования транспортных средств | 1987 |
|
SU1432560A1 |
| Устройство для адресного управления объектом | 1982 |
|
SU1109714A1 |
| Устройство для управления автоматической транспортно-складской системой | 1988 |
|
SU1665338A1 |