(54) УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ШТАБЕЛЕРОМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического управления штабелером | 1975 |
|
SU557375A1 |
| Устройство программного управления подвижным объектом | 1977 |
|
SU653189A1 |
| Устройство для автоматического адресования транспортного средства | 1984 |
|
SU1229778A1 |
| Устройство для автоматического определения состояния ячеек склада | 1987 |
|
SU1505846A2 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯШТАБЕЛЕРОМ | 1969 |
|
SU257577A1 |
| Устройство для управления движением транспортного средства | 1986 |
|
SU1317401A1 |
| Устройство программного адресования транспортного средства | 1983 |
|
SU1113337A1 |
| Устройство для автоматического адресо-ВАНия ТРАНСпОРТНОгО СРЕдСТВА | 1979 |
|
SU822201A1 |
| Устройство для автоматического адресования объекта | 1975 |
|
SU640915A1 |
| Устройство для автоматического адресования транспортного средства | 1986 |
|
SU1388904A1 |
Изобретение относится к автоматике и вычислительной технике и может быть применено для автоматизации подъемно-транспортных работ, в частности для автоматического транспортирования, установки и съема грузов в различного рода складах.
Известно устройство для автоматического управления штабелером 1, содержащее блок управления скоростью движения, последовательно соединенные блок задания ад.реса и схему сравнения, один ив входов которой соединен с первым выходом блока определения текущего адреса, последовательно соединенные блок формирования сигналов положения механизмов штабелера и блок программного задания адресов ячеек и погрузочно-разгрузочных операций, входы которого соединены соответственно с выходами блока задания адреса, схемы сравнения и вторым выходом блока определения текущего адреса, а управляющие выходы соединены соответственно с управляющими входами схемы сравнения и блоком задания адреса, определен.чя текущего адреса и управления приводами. Блок управления скорости движения содержит элементы И, ИЛИ, памяти и задержки. Первые входы двух элементов И соединены с соответствующими выходами блока формирования сигналов положения механизмов щтабелера, вторые входы - с выходом схемы сравнения, а выходы через соответствующие элементы задержки - со входами элемента ИЛИ, выходы которого соединены с первым входом элемента памяти. Второй вход элемента памяти соединен с выходом третьего элемента И. Выходы третьего элемента И подключены к соответствующему выходу блока программного задания адреса и погрузочно-разгрузочных операций и к третьему выходу блока определения текущего адреса, а выходы элемента памяти соединены со входами блока управления приводами.
Недостатком устройства являются низкие технико-экономические показатели при применении в складах с неравномерным щагом адресования грузов. При этом минимальное время движения щтабелера на малой скорости выбирается по наименьщему
щагу адресования груза.
При адресовании на позиции с другим по длине щагом щтабелер проходит на малой скорости еще и то расстояние, которое равно разности длин адресуемого и наименьшего шага. Так как малая скбрость штабелера в десятки раз меньше большей скорости, то процент непроизводительных затрат времени велик.
Целью изобретения является повышение быстродействия устройства.
Поставленная цель достигается тем, что в предложенное устройство введены блок управления скоростью движения, дешифратор, коммутатор и узел задержки. Вход дешифратора соединен с выхМом блока программного задания адресов погрузочно-разгрузочных операций. Выход дешифратора соединен с первым входом коммутатора, второй вход которого подключен к выходу схемы сравнения. Выход коммутатора узел задержки соединен с первыми входами первого и второго элементов И, вторыН входы которых соединены соответственно ;( выходами блока формирования cигнaлqв положения механизмов штабелера. Выход первого элемента И соединен с первым входом элемента ИЛИ, а выход второго элемента И через элемент задержки - со вторым входом элемента ИЛИ.
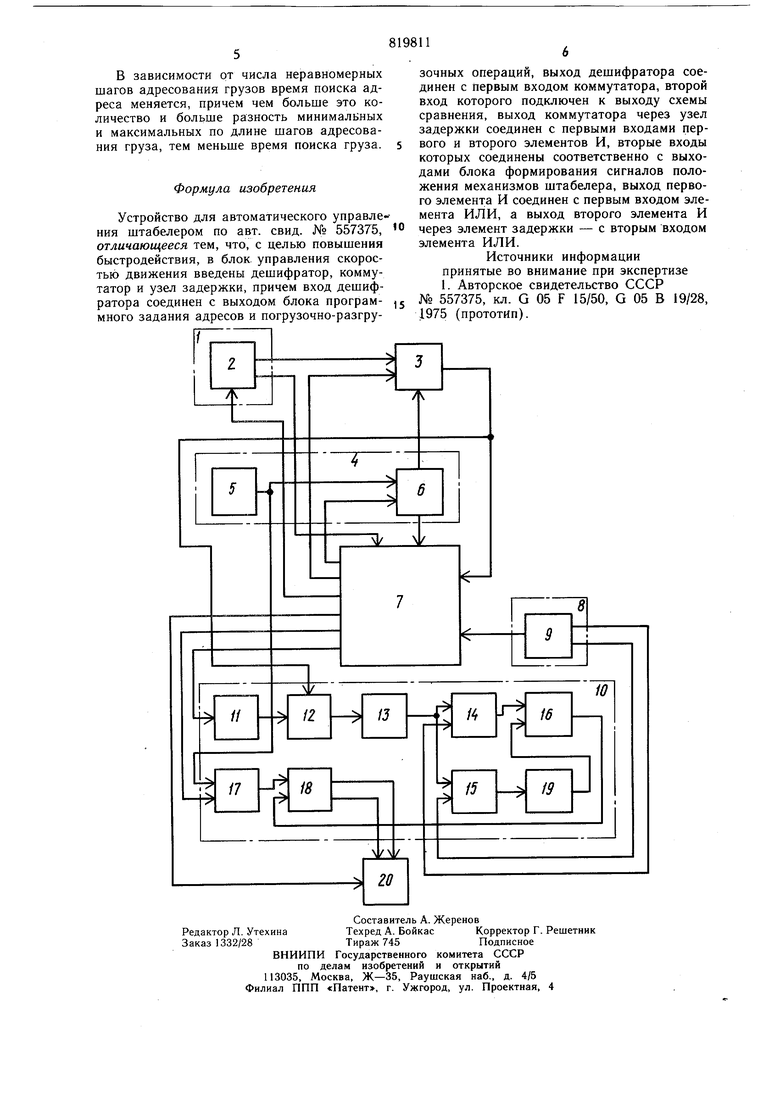
Схема устройства представлена на чертеже.
Оно содержит блок 1 задания адреса с регистром 2, схема 3 сравнения, блок 4 определения текущего адреса, состоящий из датчика 5 счета адреса и регистра 6 текущего адреса, блок 7 программного задания адресов и погрузочно-разгрузочных операций, блок 8 формирования сигналов положения механизмов штабелера, включающий датчик 9 определения «загрузка-разгрузка, блок 10 управления скоростью движения, содержащий дешифратор 11, коммутатор 12, узел 13 задержки, элементы И 14, 15, элемент ИЛИ 16, элемент И 17, элемент 18 памяти и элемент 19 задержки, а также блок 20 управления приводами.
Устройство работает следующим образом.
В блок 1 задания адреса заносится адрес груза в двоично-десятичном коде, который хранится в регистре 2. Схема 3 сравнения опрашивает и определяет, совпадает ли занесенный адрес с адресом груза, у которого находится штабелер, с записанным в регистре 6. При несовпадении в регистр 6 заносится дополнительная единица (или другое число в зависимости от того, какой выбег штабелера при торможении, т. е. за сколько шагов адресования до заданного необходимо начинать торможение) из блока 7.
Штабелер движется с болшой скоростью, и с помощью датчика 5 определяется текущая координата положения штабелера. За один адрес до заданного схема 3 сравнения выдает импульс совпадения, который поступает в блок 7 и в блок 10 управления скоростью движения.
Из блока 7 на вход дешифратора 11, 10 подается под адрес груза, на позиции которого необходимо произвести останов. По разрешающему сигналу из схемы 3 сравнения и в соответствии с адресом груза (т. е. с длиной последнего шага адресования) на позиции которого необходимо произвести останов, коммутатор 12 подключает ту задержку из узла 13 задержки, которая при данном шаге адресования груза обеспечивает наименьший пробег загруженного штабелера на малой скорости до наезда на счетный индикатор заданного адреса. Сигнал на узле 13 поступает на входы элементов И 14 и 15. Сигнал проходит через тот элемент, на втором входе которого находится разрешающий сигнал от датчика 9 определения «загрузка-разгрузка.
При наличии сигнала «Загрузка с датчика 9 сигнал на первый вход элемента 18 памяти подается через элемент ИЛИ 1б с элемента И 14, а при наличии сигнала «Разгрузка сигнал на первый вход элемента 18 памяти подается через элемент ИЛИ 16 с элемента И 15 с задержкой на элементе 19 задержки. Сигнал запоминается, а на; элементе 18 памяти появляется сигнал перехода на малую скорость, который поступает в блок 20 управления приводами.
Сигнал перехода на малую скорость по времени появляется позже, чем импульс равенства кодов. В зависимости от адреса груза - длины последнего шага адресования 0 груза, определяемого состоянием дешифратора 11 и состоянием датчика 8, выбирается время задержки.
Если длина шага адресования груза, на позиции которого необходимо произвести останов, наименьшая, то тор-можение по времени должно начаться раньше, а если длина шага адресования больше наименьшей, то торможение по времени должно быть начато позднее. Время торможения зависит и от загрузки штабелера. У загруженного штабелера торможение должно быть начато раньше.
Штабелер затормаживается и переходит на малую скорость, а на малой скорости (при коротой возможен точный останов) наезжает на счетный индикатор заданного адреса. При этом сигнал с датчика 5 поступает на вход элемента И 17, на другой вход которого при совпадении кодов блок 7 попадает разрешающий потенциал.
Импульс проходит элемент И 17 и фиксируется в элементе 18 памяти, с первого выхода которого снимается сигнал малой скорости, а на втором выходе появляется сигнал останова.
Таким образом, предложенное устройство позволяет улучшить время поиска адреJ са груза, т. е. улучшить технико-экономические показатели склада с неравномерным шагом адресования груза.
