(54) ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ ШТУЧНЫХ ГРУЗОВ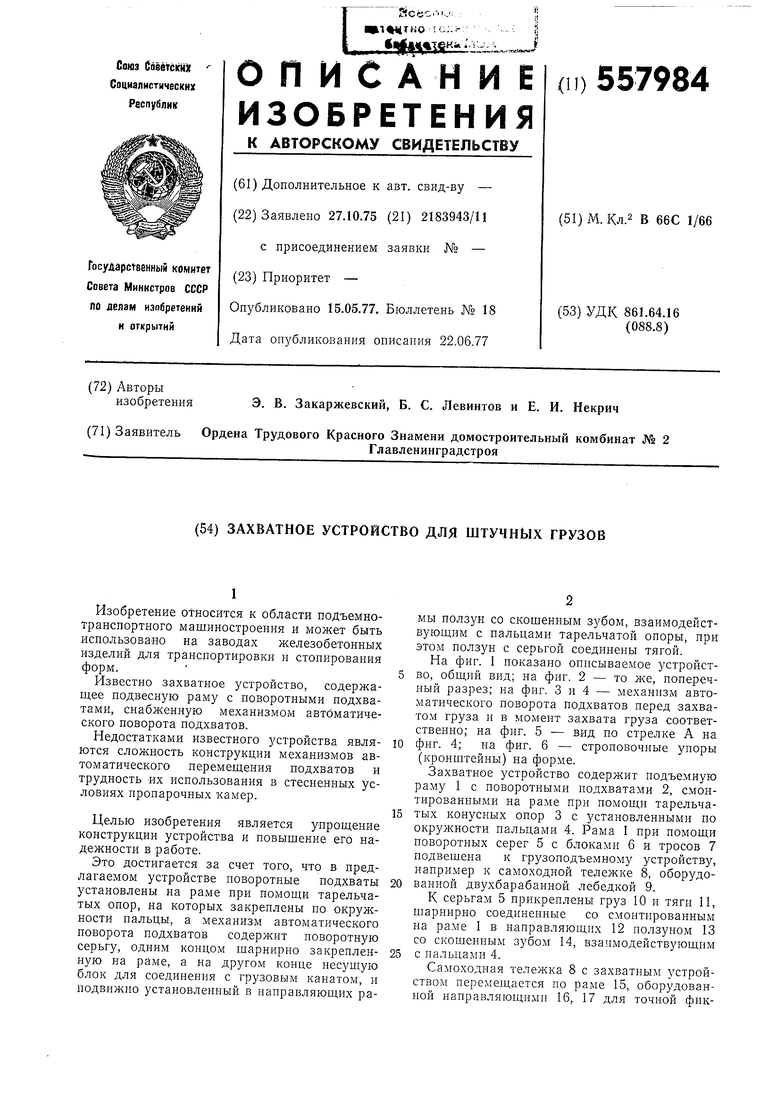
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКИЙ ЗАХВАТ РОДОВИКОВА | 2009 |
|
RU2394747C1 |
| Крановый захват-кантователь | 1976 |
|
SU640957A1 |
| АВТОЗАХВАТ ДЛЯ ТРАНСПОРТИРОВКИ МЕЛКОШТУЧНЫХ БЕТОННЫХ ИЗДЕЛИЙ | 2007 |
|
RU2337052C1 |
| Захватное устройство для облицовочных плит | 1976 |
|
SU600068A1 |
| Захват-раскладчик | 1980 |
|
SU948835A1 |
| Грузозахватное устройство | 1990 |
|
SU1736904A1 |
| Грузозахватное устройство | 1990 |
|
SU1773255A3 |
| Захват-раскладчик для штучных грузов | 1977 |
|
SU789369A1 |
| Грузозахватное устройство | 1990 |
|
SU1744036A1 |
| Грузозахватное устройство | 1984 |
|
SU1196329A1 |
1
Изобретение относится к области подъемнотранспортного машиностроения и может быть использовано на заводах железобетонных изделий для транспортировки и стопирования форм.
Известно захватное устройство, содержащее подвесную раму с поворотными подхватами, снабженную механизмом автоматического поворота подхватов.
Недостатками известного устройства являются сложность конструкции механизмов автоматического перемещения подхватов и трудность их использования в стесненных условиях пропарочных камер.
Целью изобретения является упрощение конструкции устройства и повыщение его надежности в работе.
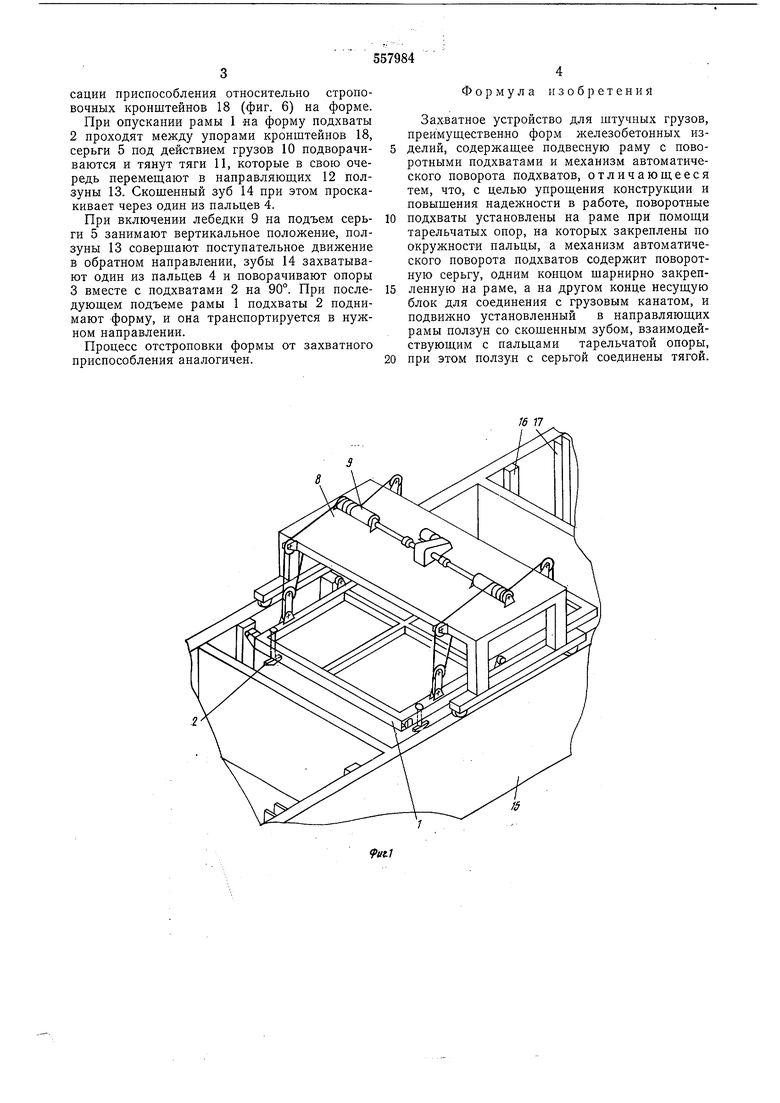
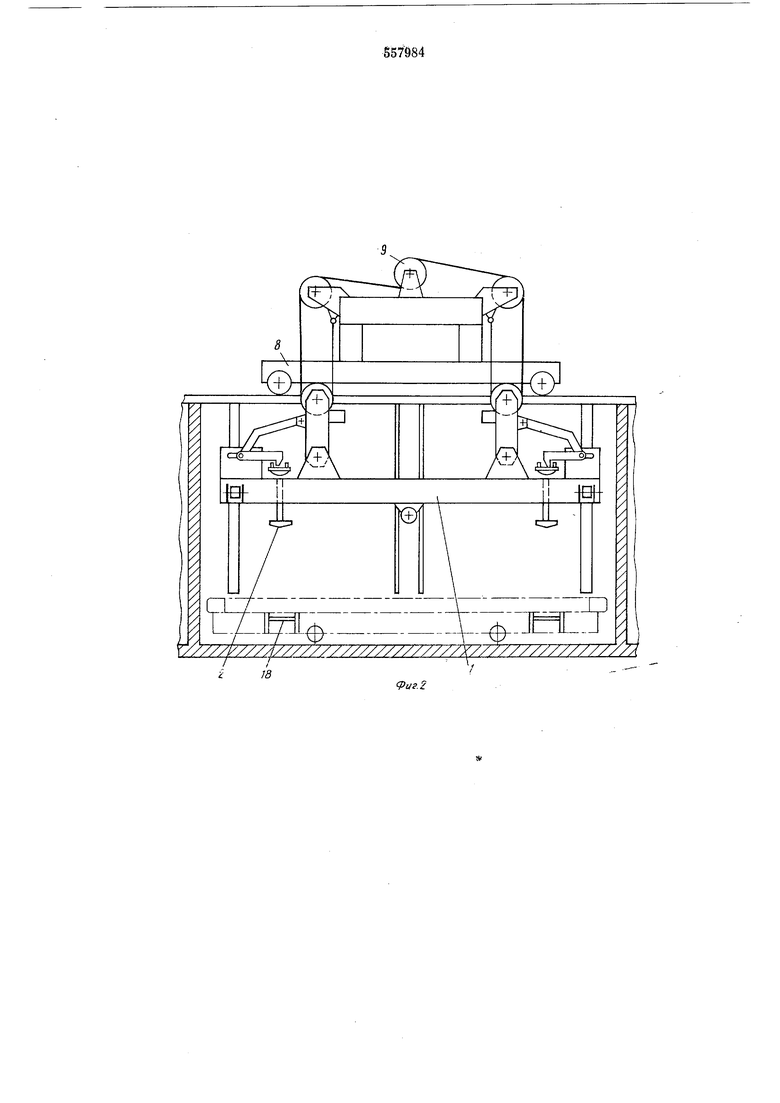
Это достигается за счет того, что в предлагаемом устройстве поворотные подхваты установлены на раме при помощи тарельчатых опор, на которых закреплены по окружности пальцы, а механизм автоматического поворота подхватов содержит поворотную серьгу, одним концом шарнирно закрепленную на раме, а на другом конце несущую блок для соединения с грузовым канатом, и подвижно установленный в направляющих рамы ползун со скощенным зубом, взаимодействующим с пальцами тарельчатой опоры, при этом ползун с серьгой соединены тягой. На фиг. 1 показано описываемое Зстройство, общий вид; на фиг. 2 - то же, поперечный разрез; на фиг. 3 и 4 - механизм автоматического поворота подхватов перед захватом груза и в момент захвата груза соответственно; на фиг. 5 - вид по стрелке А на
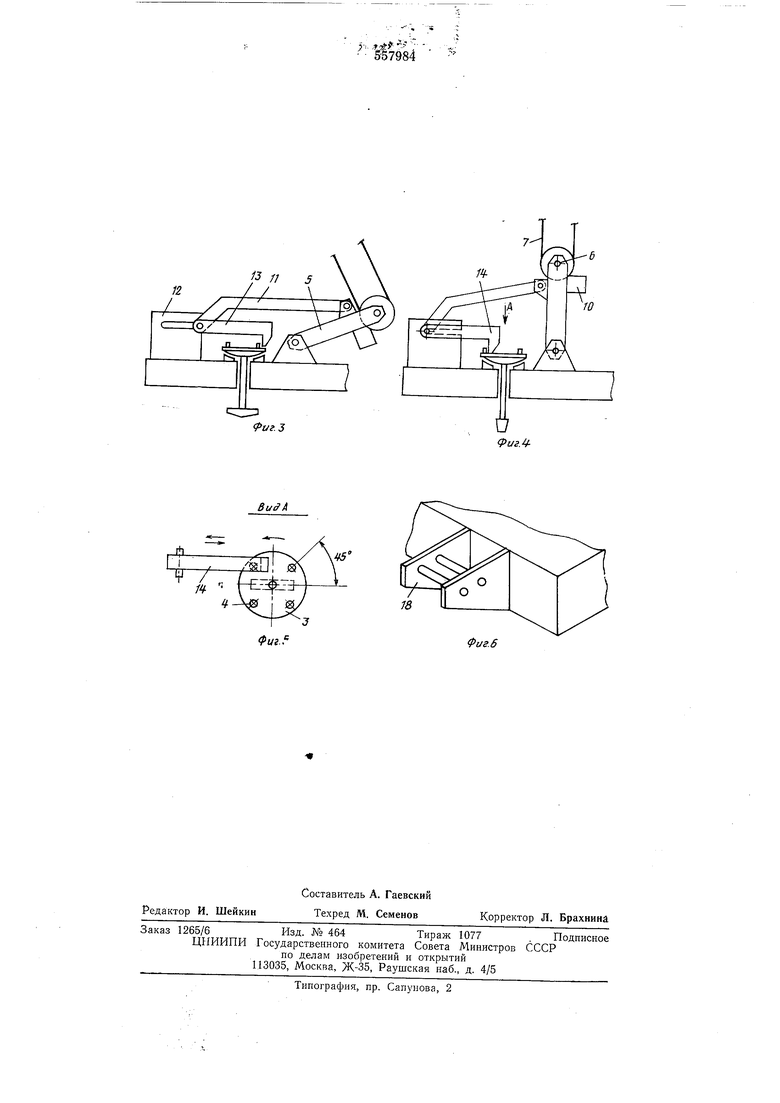
фиг. 4; на фиг. 6 - строповочные упоры (кронщтейны) на форме.
Захватное устройство содерл ит подъемную раму 1 с поворотными подхватами 2, смонтированными на раме при помощн тарельчатых конусных опор 3 с установленными по окружности пальцами 4. Рама 1 при помощи поворотных серег 5 с блоками 6 и тросов 7 подвешена к грузоподъемному устройству, например к самоходной тележке 8, оборудованной двухбарабанной лебедкой 9.
К серьгам 5 прикреплены груз 10 и тяги И, шарннрно соединенные со смонтированным на раме 1 в направляющих 12 ползуно.м 13 со скошенным зубом 14, взаимодействующим
с пальцами 4.
Самоходная тележка 8 с захватным устройством перемещается по раме 15, оборудованной направляющими 16, 17 для точной фиксации приспособления относительно строповочных кронштейнов 18 (фиг. 6) на форме.
При опускании рамы 1 «а форму подхваты
2проходят между упорами кронштейнов 18, серьги 5 под действием грузов 10 подворачиваются и тянут тяги И, которые в свою очередь перемещают в направляюш,их 12 ползуны 13. Скошенный зуб 14 при этом проскакивает через один из пальцев 4.
При включении лебедки 9 на подъем серьги 5 занимают вертикальное положение, ползуны 13 совершают поступательное движение в обратном направлении, зубы 14 захватывают один из пальцев 4 и поворачивают опоры
3вместе с подхватами 2 на 90°. При последуюп1,ем подъеме рамы 1 подхваты 2 поднимают форму, и она транспортируется в нужном направлении.
Процесс отстроповки формы от захватного приспособления аналогичен.
Формула изобретений
Захватное устройство для штучных грузов, преимуш;ественяо форм железобетонных изделий, содержащее подвесную раму с поворотными подхватами и механизм автоматического поворота подхватов, отличающееся тем, что, с целью упрощения конструкции и повышения надежности в работе, поворотные
подхваты установлены на раме при помощи тарельчатых опор, на которых закреплены по окружности пальцы, а механизм автоматического поворота подхватов содержит поворотную серьгу, одним концом шарнирно закрепленную на раме, а на другом конце несущую блок для соединения с грузовым канатом, и подвижно установленный в направляющих рамы ползун со скошенным зубом, взаимодействующим с пальцами тарельчатой опоры,
при этом ползун с серьгой соединены тягой.
П
15
12
иг.З
П
ГО
|А
О
Фиг.
В и if А
-Д
