Изобретение относится к устройствам управления выправкой железнодорожного пути.
По основному авт.св. № 667622 известна путевая машина, содержащая раму, связанные с ней измерительные тележки, шкворни которых соединены балкой, и механизм выправки пути с устройством его управления, состоящим из подвижной каретки, копира с рычагом, гироскопа направления, установленного на шкворне задней измерительной тележки, и сельсинной следящей системы, сельсин-датчик которой механически связан с гироскопом, а сельсин-приемник - с рычагом устройства управления механизмом выправки 1. ,
Однако на точность работы машины/ в процессе выправки пути в плане сильное влияние оказывает так называемый уход гироскопа, который является независимым датчиком направления. УходV появляется вследствие невозможности точной регулировки системы широтной коррекции гироскопа, которая удерживает ось его вращения неподвижной относительно местных предметов. На работу системы коррекции также влияют внешни е
факторы: изменение температуры внешней среды, нагрев элементов системы коррекции протекающим по ним током, изменение напряжения и частоты питающего гироскоп тока, износ вращающихся частей.
Гироскоп направления обладает большой чувствительностью и выдает .сигнал при отклонении его от заданного направления на величину порядка нескольких угловых минут. В процессе выправки гироскоп работает в области отклонений, соизмеримой с его предельной jчувствительностью, р
15 связи с тем, что балка, измеряющая отклонение пути относительно гироскопа, имеет малую длину.
УХОД гироскопа направления даже при тщательной регулировке
20 системы коррекции соизмерим с величиной полезного сигнала и при некоторых .неблагоприятных условиях может превышать полезный сигнал в несколько раз. Это обстоятельство
25 и служит причиной увода выправляемого пути в сторону от заданного направления.
Для исключения ухода гироскопа его ось вращения должна сохра30нять направление, которое она полу чила в исходной точке. Это же направление должна, занимать и балка, соединяющая шкворни измеритеях-ных тележек. При этом гироскоп как бы повторяет положение той точки пути, на которой находится измерительная тележка. Это положение должно сохI раниться в процессе, выправки, так как машина выправляет искривленный путь/ а тележка движется по прямому пути, поставленному в заданное положение. При .этом угол поворота балки вокруг шкворн-- относительно тележки должен быть равен углу поворота корпуса гироскопа относительно Эго гиросистемы, поскольку корпуЬ гироскопа связан с балкой.
Цель изобретения - . повьпиение точности управления выправкой железнодорожного пути.
.Эта цель достигается тем, что машина снабжена дв5мя потенциометрс1ми, движок первого из которых соединен с гироскопом направления,, а движок второго - с балкой, и двухобмоточным реле, обмотки которого включены встречно, причем одна из них включена, между средней точкой и движком потенциометра, а другая - между движками первого и второго потенциометров . .
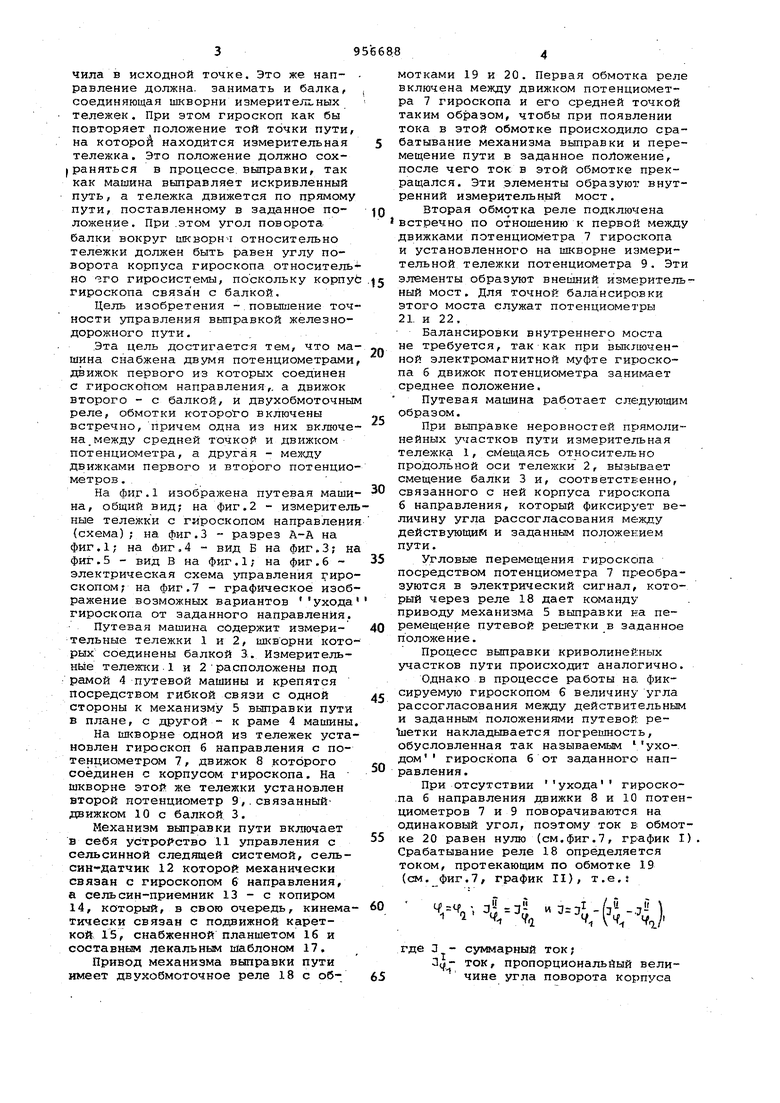
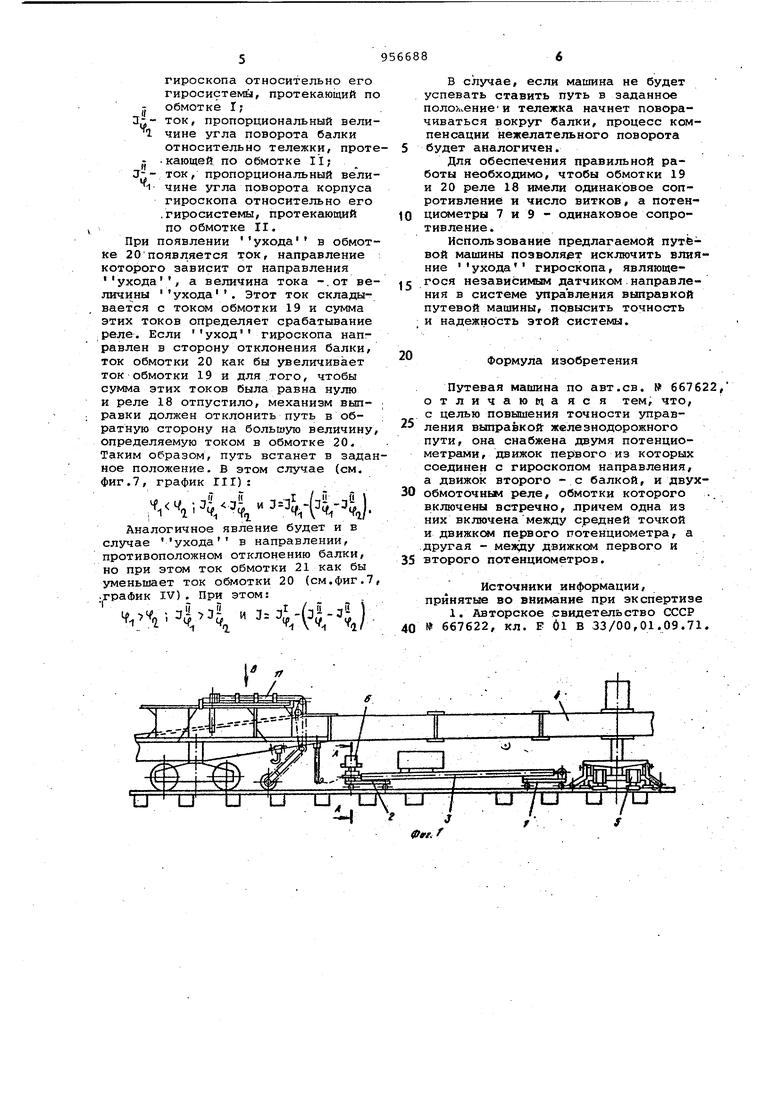
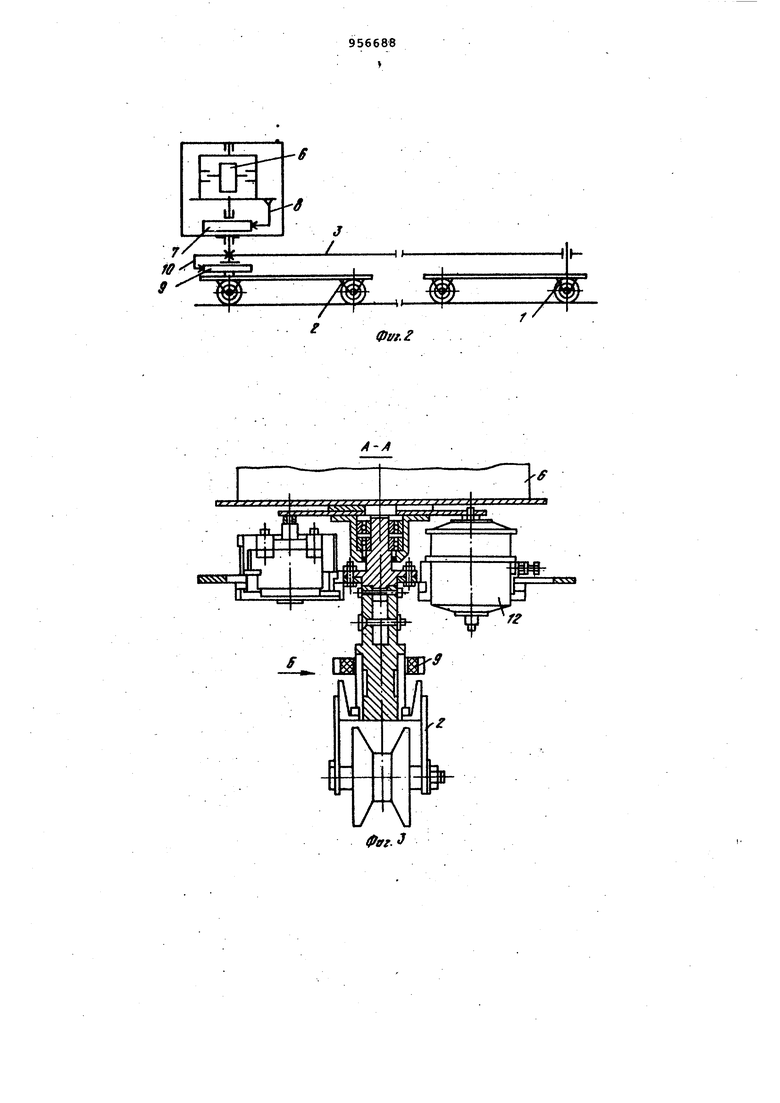
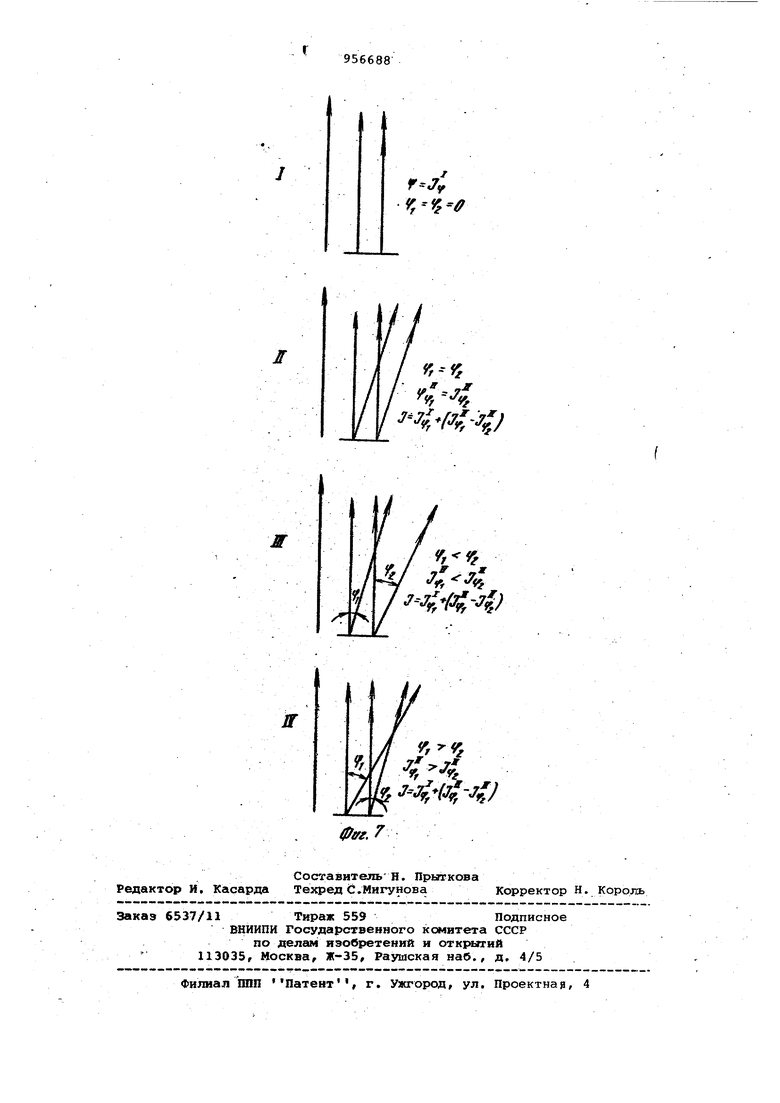
На фи.г. 1 изображена путевая машина, общий вид; на фиг.2 - измеритель ные тележки с гироскопом направления (схема); на фиг.З - разрез А-А на фиг,1; на фиг,4 - вид Б на фиг.3; на фиг.5 - вид В на фиг.1; на фиг.6 электрическая схема управления гироскопом; на фиг,7 - графическое изображение возможных вариантов ухода гироскопа от заданного направления.
Путевая машина содержит измерительные тележки 1 и 2, шкворни которых соединены балкой 3.. ИзмерительнУе тележки.1 и 2расположены под рамой 4 путевой машины и крепятся посредством гибкой связи с одной стороны к механизму 5 выправки пути в плане, с другой к раме 4 машины.
На шкворне одной из тележек установлен гироскоп б направления с потенциометром 7, движок 8 которого соединен с корпусом гироскопа. На шкворне этой же тележки установлен второй потенциометр 9,.связанныйдвижком 10 с балкой 3.
Механизм выправки пути включает в себя устройство 11 управления с сельсинной следящей системой, сельсин-датчик 12 которой механически связан с гироскопом 6 направления, а сельсин-приемник 13 - с копирсял 14, который, в свою очередь, кинематически связан с подвижной кареткой 15, снабженной планшетом 16 и составнЕдм лекальным шаблоном 17.
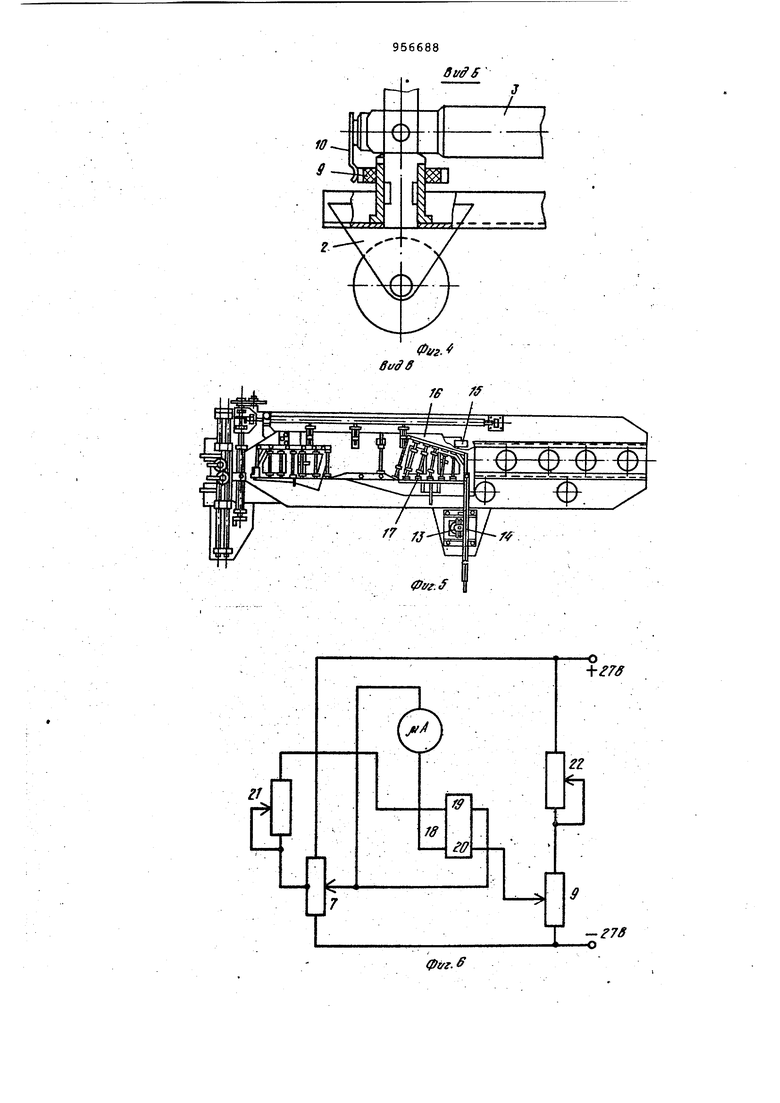
Привод механизма выправки пути имеет двухобмоточное реле 18 с обмотками 19 и 20. Первая обмотка реле включена между движком потенциометра 7 гироскопа и его средней точкой таким образом, чтобы при появлении тока в этой обмотке происходило срабатывание механизма выправки и перемещение пути в заданное положение, после чего ток в этой обмотке прекращался. Эти элементы образуют внутр.енний измерите ль н.ый мост.
Вторая обмотка реле подключена встречно по отношению к первой между движками потенциометра 7 гироскопа и установленного на шкворне измерительной тележки потенциометра 9. Эти элементы образуют внешний измерительный мост. Для точной балансировки этого моста служат потенциометры 21. и 22.
Балансировки внутреннего моста не требуется, так как при выключенной электромагнитной муфте гироскопа б движок потенциометра занимает среднее положение.
Путевая машина работает следующим образом.
При выправке неровностей прямолинейных y iacTKOB пути измерительная тележка 1, смещаясь относительно продольной оси тележки 2, вызывает смещение балки 3 и, соответстЕ:енно, связанного с ней корпуса гироскопа б направления, который фиксирует величину угла рассогласования между действующим и заданным положением пути.
угловые перемещения гироскопа посредством потенциометра 7 преобразуются в электрический сигнал, который через реле 18 дает команду приводу механизма 5 выправки на перемещение путевой решетки в за.цанное положение.
Процесс выправки криволинейных участков пути происходит аналогично.
Однако в процессе работы на фиксируемую гироскопом 6 величину угла рассогласования между действительным и заданным положениями путевой ре Ыетки накладывается погрешность, обусловленная так называемым уходом гироскопа б от заданного направления.
При отсутствии ухода гироскопа б направления движки 8 и 10 потенциометров 7 и 9 поворачиваются на одинаковый угол, поэтому ток в обмотке 20 равен нулю (см,фиг.7, график I), Срабатывание реле 18 определяется током, протекающим по обмотке 19 (см, фиг.7, график II), т.е.г
о -з
.-fai-.7. Ч-
Ч. -,
где Л - суммарный ток;
3(|1- ток, пропорциональйый вели чине угла поворота корпуса
гироскопа относительно его гиросистемы, протекающий по обмотке I;
nL
ток, пропорциональный величине угла поворота балки относительно тележки, протекающей по обмотке 11;
-f . ток, пропорциона.льный величине угла поворота корпуса гироскопа относительно его .гиросистемы, протекающий по обмотке II.
При появлении ухода в обмотке 20 появляется ток, направление которого зависит от направления
ухода
а величина тока -.от величины ухода. Этот ток складывается с током обмотки 19 и сумма этих токов определяет срабатывание реле. Если уход гироскопа направлен в сторону отклонения балки, ток обмотки 20 как бы увеличивает ток обмотки 19 и для .того, чтобы сумма этих токов была равна нулю и реле 18 отпустило, механизм выправки должен отклонить путь в обратную сторону на большую величину, определяемую током в обмотке 20. Таким образом, путь встанет в заданное положение, в этом случае (см. фиг.7, график ГЦ):
Аналогичное явление будет и в
ухода
в направлении.
случае
противоположном отклонению балки, но при этом ток обмотки 21 как бы уменьшает ток обмоткк 20 (см.фиг.7, -график IV). При этом;
.44 iX4-U
В случае, если машина не будет успевать ставить путь в заданное поло.ениеи тележка начнет поворачиваться вокруг балки, процесс компенсации нежелательного поворота будет аналогичен.
Для обеспечения правильной работы необходимо, чтобы обмотки 19 и 20 реле 18 имели одинаковое сопротивление и число витков, а потенцис 1етры 7 и 9 - одинаковое сопротивление.
Использование предлагаемой путёвой машины позволяет исключить влияние ухода гироскопа, являющегося независимым датчиком направле5ния в системе управления выправкой путевой машины, повысить точность и надежность этой системы.
20
Формула изобретения
Путевая машина по авт.св. № 66762 отличающаяся тем, что, с целью повышения точности управления выправкой железнодорожного пути, она снабжена двумя потенциометрами, движок первого из которых соединен с гироскопом направления, а движок второго - с балкой, и двух30 обмоточные реле, обмотки которого .
включены встречно, причем одна из
них включенамежду средней точкой
и движксял первого потенциометра, а
.другая - меаду движксм первого и
35 второго потенциометров.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР 40 № 667622, кл. Е б1 В 33/00,01.09.71.
Ж
У
/
| название | год | авторы | номер документа |
|---|---|---|---|
| Путевая машина | 1971 |
|
SU667622A1 |
| ИМПУЛЬСНЫЙ РЕГУЛЯТОР | 1967 |
|
SU199225A1 |
| Устройство для автоматического управления механизмами машин-орудий | 1937 |
|
SU55814A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ МАГИСТРАЛЬНЫМ ЭЛЕКТРОВОЗОМ | 1966 |
|
SU187079A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ДИАМЕТРА ПРОВОДА В ПРОЦЕССЕ ЕГО ИЗОЛИРОВАНИЯ | 1973 |
|
SU388304A1 |
| Устройство управления рабочим органом для выправки положения пути | 1980 |
|
SU966130A1 |
| Устройство управления исполнительным органом машины для выправки пути | 1979 |
|
SU863744A1 |
| Измерительное устройство машины для выправки железнодорожного пути | 1990 |
|
SU1693156A1 |
| Устройство для выправки железнодорожного пути | 1980 |
|
SU927883A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ПРОИЗВОДСТВА ПРИБЛИЖЕННЫХ ВЫЧИСЛЕНИЙ | 1932 |
|
SU36063A1 |
х:
BtfffS
:::j
Zf
гг
fff
7ff
го
Т
i.ri
0Cff.ff
y,y,ff
