1
Изобретение относится к машиностроению, а именно к манипуляторам для автоматиэашш вспомогательных операций на машиностроительных предприятиях лри обслу жнванин, например, процессов пластической. двформа аии деталей, механической обработ кн, литья под давлением и сборки.
Известен манипулятор для автоматизации вспомогательных операций, в котором схват имеет число степеней свободы, равное чис- лу механизмов линейного перемещения в приводе ХЧ.
РазоьЛснутая кинематическая цепь извест ного манипулятора снижает его эксплуатационные качества.
Наиболее близок к изобретению манип лятор, в котором схват перемещается приводом с механизмами линейного перемещения, число которых равно числу степеней свободы 2.
Этот манипулятор сложен по конструкции и имеет длинную разомкнутую ринематичес- кую цепь, что снижает его динамические /качества, точность позиционнровя ия, увел чивает массу н габариты механической руки.
Цель изобретения - повышение эксплуатационных качеств и упрощение конструкшш.
Для этого в предлагаемом манипулятор механическая рука выполнена в виде крестовины, на одном плече которой смонтирован схват, а каждое из остальных трех плеч этой крестовины шарнирно соедино}Ш с двумя одноименными звеньями механизмов Л1шейного перемещения, например со штоками, другие звенья которых, например цилиндры, попарно соединены между собой и шарнирно установлены на корпусе в точках, являющихся вершинами равносторо него треугольника, при этом центры шарниров на крестовине расположены в вершинах подобного треугольника, повернутого относительно треугольника основания на 60°.
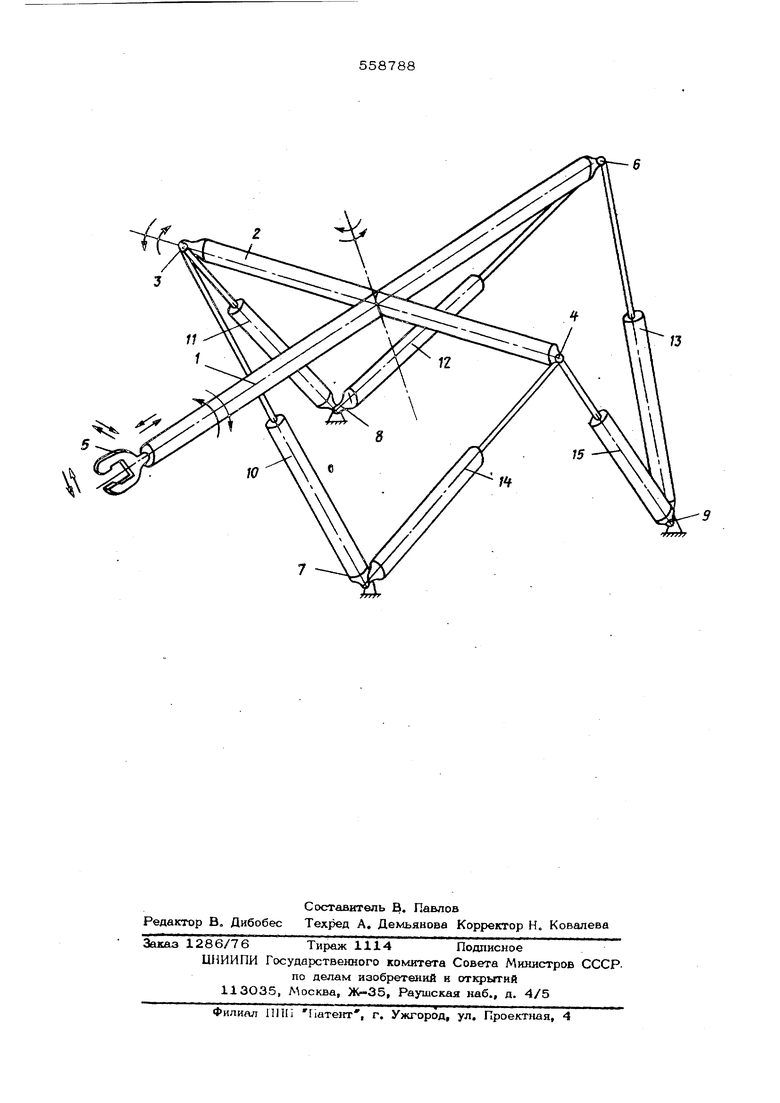
На чертеже дана принципиальная схема манипулятора.
Манипулятор имеет механическую руку с шестые степенями свободы, выполиол}1ую
в виде крестовины с продольными 1 в поперечными 2 ппечами. На концах поперечных плеч 2 смонтированы шарнирные опоры 3 и 4. На одном продольном плече 1 установлен охват 5, а на другомша ширная опора 6. Манипулятор имеет привод в виде механизмов линейного переMemeBHHt например силовых цилиндров.
На основании также установлены три опоры 7, 8 и 9. Опоры расположены в вер шинах подобного треугольника, повернуто- го в своей плоскости относительно первого на 60°. С опорой 3 шарнирно связаны што ки цилиндров 10 и 11, с опорой 6 - штоKB шишндров 12 и 13, с опорой 4 - штокн цилиндров 14 и 15. С нижней опорой 7 шарыирно связаны цилиндры 1О и 14, с опорой 8 - цшп1ндры 11 и 12, с опорой 0 - цилиндры 13 и 15. Эсе шесть цилиин дров одинаковые.
Манипулятор сработает следующим образом.
: ПриДвижении штоков силовых цилиндров 12 и 13 рука поворачивается вокруг поперечной оси. При движении штоков силовых цилиндров|14 и 13 вверх (либо вниз), а штоков цилиндров 10 и 11 - вниз (либо вверх) рука поворачивается вокруг продольной оси. При штоков силовых цилиндров 10, 12 и 15 в одну сторону, на пример вверх, а штоков силовых шшиндроэ
11,13 и 14 - в другую, рука поворач вается вокруг вертикальной оси. При движении штоков всех цилиндров в одном на- 1фаалешш рука перемещается вертикально, При движении штоков цилиндров 11 и 15 в одну сторону, а штоков цилшадров Ю,
12,13 и 14 в другую, рука начинает перюмешаться в продольном направлении. При движении штоков цилиндров 10 и 13 в одну сторону, а штоков цили1адров 12 и 14- в другую начинается поперечное перемещение руки.
Формула изобретения
Манипулятор, содержащий корпус, механическую руку, схват которой имеет шесть степеней свободы, и привод с числом механизмов линейного перемещения, например силовыми цилиндрами, равным числу степеней свободы схвата, отличающий с я тем, что, с целью повышения эксплу атационных качеств и упрощения конструкции, механическая рука выполнена в виде крестовины, на одном плене которой смонтирован схват, а каждое из остальных трех плеч этой крестовины шарнирно соединено с двумя одноименными звеньями механизмов линейного перемещения,, на1фимер со шток&. ми, . другие зве.нья , например цилйддры; попарно средйневы между собой и шарнирко устаковлед на корпусе в , являющихся вершинами равностороннего треугЬльника, при этом центры шарниров на крестоВине расположены в вершинах 0 подобного треугольника, повернутого 9тн С1ггельно треугольника основания на 60®.
Источники информации, принятые во внк мание при экспертизе:
1.Патент США N 3160290, кл. 214-1, 6 1964.
2.Авторское свидетельство СССР № 2453О7, кл. 35в 3/11, 1968.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР | 1971 |
|
SU313653A1 |
| Механическая рука | 1978 |
|
SU738863A1 |
| Манипулятор | 1986 |
|
SU1321581A1 |
| ПРОСТРАНСТВЕННЫЙ ПЛАТФОРМЕННЫЙ VIP-МАНИПУЛЯТОР | 2019 |
|
RU2722165C1 |
| Механическая рука манипулятора | 1985 |
|
SU1283076A1 |
| КОНТРОЛЛЕР ОПЕРАТОРА ДЛЯ УПРАВЛЕНИЯ РОБОТОХИРУРГИЧЕСКИМ КОМПЛЕКСОМ | 2019 |
|
RU2718595C1 |
| СТРЕЛА ГРУЗОПОДЪЕМНОГО СРЕДСТВА | 2003 |
|
RU2231494C1 |
| ПЛАТФОРМЕННЫЙ СТЫКОВОЧНЫЙ МАНИПУЛЯТОР | 2020 |
|
RU2751781C1 |
| Рука манипулятора | 1979 |
|
SU841963A1 |
| Манипулятор | 1988 |
|
SU1569222A1 |