1
Йаобретение относится к подъемно-транспортным устройствам, в частности к шагакм щим конвейерам для перемещетшя штучных грузов с одной paf чей позиции на другую.
Известны шаговые конвейеры для переч .мешения штучных грузов, включакшие верхнюю неподвижную раму, подвижнуто раму, ходовую часть, привод горизонтального воэ. вратно-поступательного перемещения подвижной рамы, привод вертикального перемешения подвижной рамы, вьшолненный в виде домкратов с роликами tl.
Наличие привода вертикального переме шения подвижной рамы усложняет конструк цию и надежность конвейера, особенно в цехах с тяжелыми условиями работы.
Известен также шаговый конвейер, включающий неподвижную раму с опорной чплат формой, подвижный стол, шарннрно установ ленный на стержн51х и снабженный упорами, н приводг 2.
Однако такой конвейер i имеет сложную конструкцию из-за наличия приводов вертикального перемещения, вьшолненных в виде
домкратов, и привода горизонтального nei) мешения.
Целью изобретения является упрощение конструкции.
Это достигается тем, что стержни уста новлены подвижно на опорной платформе,& которой выполнены углубления для пернодн ческого взаимодействия со стержнями, а упоры установлены на боковых сторонах о стержней.
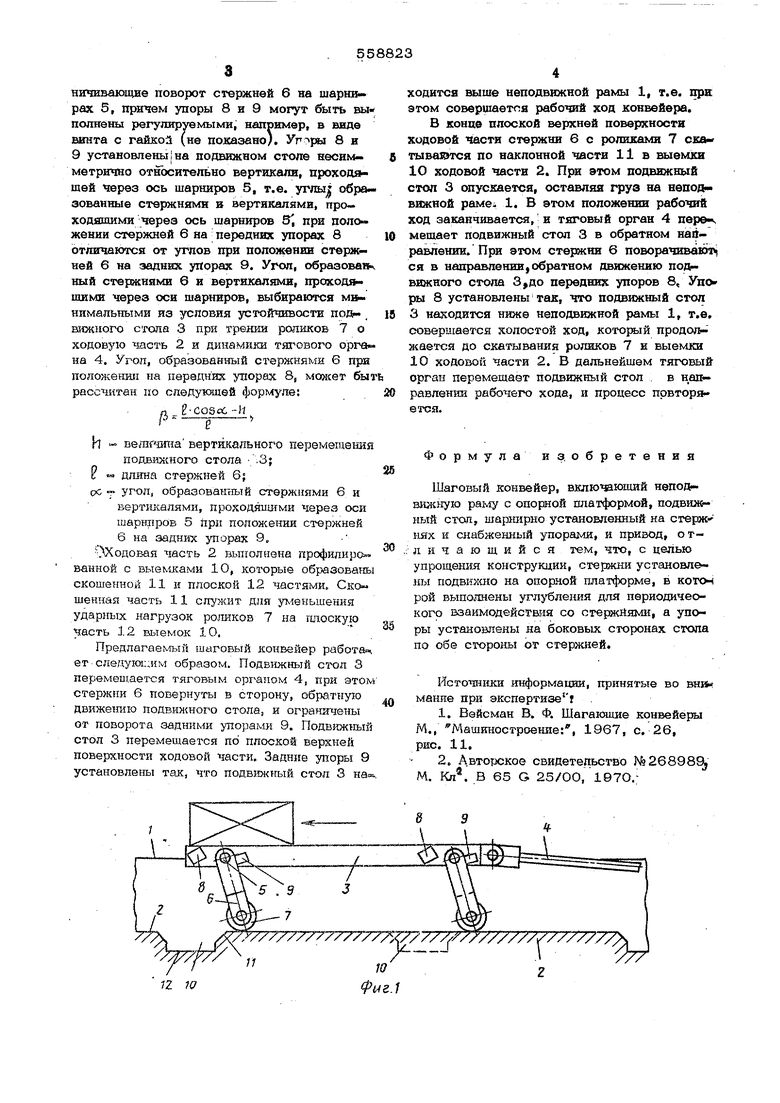
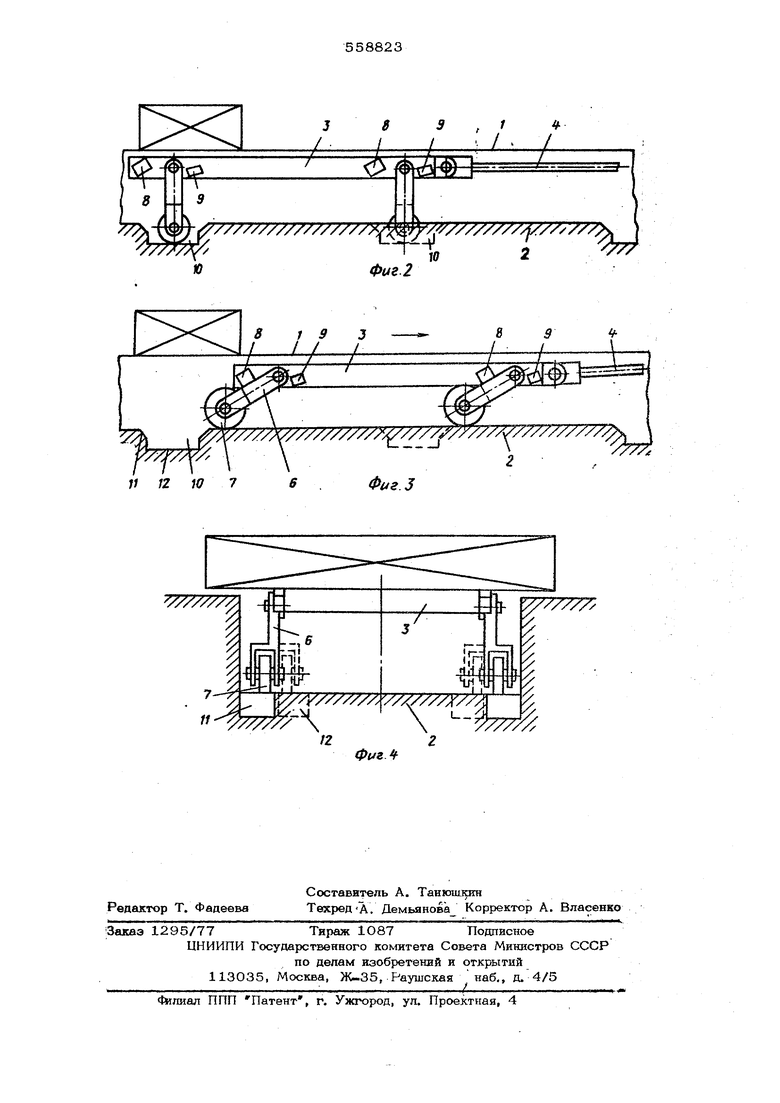
На фиг. 1 показан подвижный стол при рабочем движении; на фиг. 2 - то же, в крайней точке; на фиг. 3 - то же, при холостом ходе; на фиг. 4 - то же, вид ди.
Предлагаемый шаговый конвейер состой из неподвижной рамы 1, ходовой профилированной части 2 и подвижного стола 3, cBSi зашюго тяговым органом 4 с приводом горизонтального возвратно-поступательного движения. Подвижный стол 3 имеет шарниры 5, на которых смонтированы стержни 6 с роликами 7. На подвижном столо 3 в ппос кости врашения стержней 6 установлены передние упорл 8 и задние упоры 9, огрв нюшвающие поворот стержней 6 не шарни pax 5, причем упоры 8 и 9 могут быть вы полнены регугафуемыми; например, в виде ышта с гайкой (не показано). 8 и 9 установлены I на подвижном стопе несимметрично относительно вертикали, проходящей через ось шарниров 5, т.е. углы| обрвм зованные стержнями в вертикалями, про ходящими через ось шарниров 3, при положении стержней 6 на передних упорах 8 отличаются от углов при положении стержней 6 на задних упорах 9. Угол, образоваик ный стержнями 6 и вертикал51ми, проходящими через оси шарниров, выбираются MBSнимальными из условия устой:чивости вижного стопа 3 при грении роликов 7 о ходовую часть 2 и динамики тягового орга на 4. Угол, образованный стержнями 6 при положенш на передних упорах 8, может бы рассчитан по следующей формуле: д g-COS jv t И - GQHif-uma вертакального перемещения подБЮхсного стола .3; 2 « длина стержней 6j сл угол, образованггый стержнями 6 и вертшшдями, проходяишми через оси шарн1 ров 5 при положении стержней 6 на задних упорах 9. Ходовая часгь 2 выполнена профилиро. ванной с выемками 10, которые образованы скошенной 11 и плоской 12 частями, Ско шейная часть 11 служит для уг,геньшения ударных нагрузок pojraKOB 7 на плоскую часть 12 выемок 10. Предлагаемый шаговый конвейер работает следующим образом. Подвижный стол 3 перемещается тяговым органом 4, при этом стержни 6 повернуты в сторону, обр8.тную движе1шю ПОДВИН4НОГО стола, и ограничены от поворота задними улорами 9. Подвиж шй стол 3 перемещается по плоской верхней поверхности ходовой части. Задние упоры 9 установлены так, что подвгоктахй стол 3 на« ходится выше неподвижной рамы 1, т.е. црк этом совершаетпя рабочий ход конвейера. В конце плоской верхней поверхности ходовой части стержни 6 с роликами 7 скатываются по наклонной части 11 в выемки 10 ходовой части 2. При этом подвижный стоп 3 опускается, оставляя груз на непод вижной раме 1. В этом попожении рабочий ход заканчивается, и тяговый орган 4 пере мешает подвижный стол 3 в обратном иайравпении. При этом стержни 6 поворачивают ся в направлении, обратном движению по, вижного стола 3,до передних упоров 8, Упоры 8 установлены так, что подвижный стоп 3 находится ниже неподвижной рамы 1, т.е. сювершается холостой ход, который продол- жается до скатывания роликов 7 и выемки 10 ходовой части 2. В дальнейщем тяговый орган перемещает подвижный стол . в н,ап- равленйн рабочего хода, и процесс повторяется. Формула из. обретения Шаговый конвейер, включающий неподвижную раму с опорной платформой, подвиз ный стол, mapjmpHo установленный на стерк шх и снабженный упорами, и привод, отл и ч а ю щ и и с я тем, что, с целью упрощения конструкции, стержни установлены подвикшо на опорной платформе, в котон рой выполнены угл бления для периодичеокогр взаимодействия со стержйями, а упоры устаноззлены на боковых сторонах стояа по обе стороны от стержней. Источники информации, принятые во внимание при экспертизе 1.ВеЙсман В. Ф. Шагающие конвейеры М.,Машиностроение:, 1967, с. 26, рис. 11, 2.Авторское свидетельство №26898 М. Кл. В 65 G 25/00,1970.;
3g9,1
/.//. / /
J/// /////////////, / //////// /Y/
Фиг2 %.p Y/ jf/ /11 12 10 I i/.5V y////)/////////// ////f/ // 7 Фиг 5
| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый конвейер | 1978 |
|
SU734092A1 |
| Шаговый конвейер | 1977 |
|
SU648477A1 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| Пластинчатый конвейер | 1982 |
|
SU1093641A1 |
| Шаговый конвейер | 1989 |
|
SU1657453A2 |
| Шаговый конвейер | 1978 |
|
SU727529A1 |
| Устройство для сортирования сухого лущеного шпона | 1988 |
|
SU1579781A1 |
| Устройство для вырубки плоских заготовок | 1983 |
|
SU1139548A1 |
| Устройство для укладки длинномерных изделий в пакет | 1989 |
|
SU1756248A1 |
| Устройство Кривовязюка для отделения листа от стопы и подачи его в зону обработки | 1983 |
|
SU1133006A1 |
7-
///Y/// ///
/22
У//////Х//.
W
t
ф«/г
