Изобретение относится к конвейерам с циклически движущимися грузоно- сителями, в частности к конвейерам с возвратно-поступательным движением гру- зомосителей, разъединяемых с грузом при обратном ходе, и является усовершенс ии- ванием конвейера по авт. св. № 1159844.
Целью изобретения является расширение технологических возможностей конвейера путем обеспечения вертикального перемещения груза в конце шага перемещения подвижной рамы.
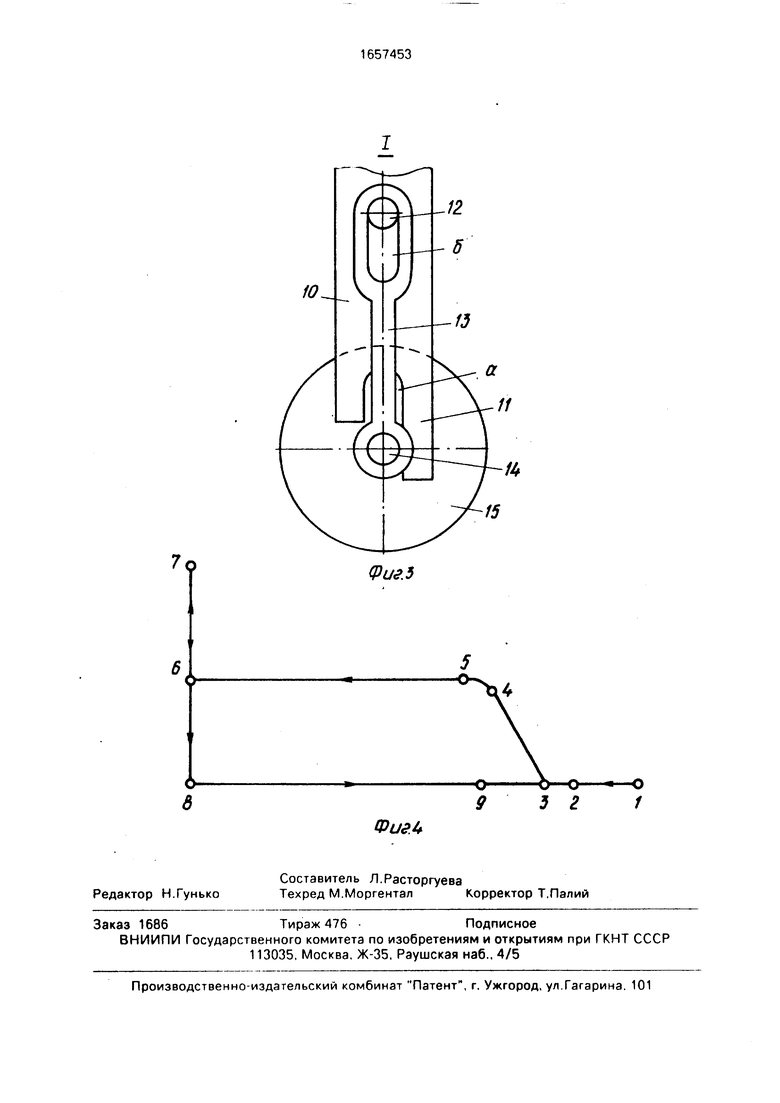
На фиг.1 изображен шаговый конвейер, вид сбоку; на фиг.2 -- вид А на фиг.1; на фиг.З - узел I на фиг.1; на фиг.4 - траектория дви- жения платформы.
Шаговый конвейер содержит неподвижную раму 1 с жестко установленными на ней вертикальной неподвижной направляющей 2, задней вертикальной неподвижной направляющей 3. горизонтальными направ- пяющими4 и копирами 5. На направляющих 4 посредством опорных роликов 6 установлена подвижная рама 7, связанная с приводом горизонтального перемещения (не показан). В верхней части подвижной рамы 7 с возможностью возвратно-поступательного перемещения (скольжения) по ней установлена платформа 8 с упорным роликом 9 на ее переднем по ходу перемещения кон- це, т.е. обращенном в сторону вертикальной направляющей 2. Платформа 8 расположена между вертикальными неподвижными направляющими 2 и 3 с возможностью поочередного взаимодействия с ними. В ниж- ней части подвижной рамы 7 укреплены кронштейны 10, выполненные с выступом 11 и выемкой а. На кронштейнах Юустанов- лены пальцы 12, на которые навешаны посредством пазов б планки 13. На концах планок 13 закреплены оси 14 грузовых роликов 15. Копиры 5 выполнены с выступами на концах, обращенных в сторону вертикальной направляющей 2. Грузовые ролики 15 установлены с возможностью взаимо- действия с выступами 16 копиров 5 в конце шага перемещения подвижной рамы 7 при взаимодействии платформы 8 с вертикальной направляющей 2.
Шаговый конвейер работает следую- щим образом.
В исходном положении (фиг.1) подвижная рама 7 находится в крайнем правом положении и лежит опорными роликами 6 нэ горизонтальных направляющих 4. Плат- форма 8 также находится в крайнем правом положении с упором в заднюю вертикальную направляющую 3 (этому положению платформы 8 соответствует точка 1 траектории движения платформы, фиг.4) Грузовые
ролики 15 при этом под действием собственного веса опущены в крайнее нижнее положение, их оси 14 находятся под выемками а, но не ниже односторонних выступов 11. С помощью грузоподъемного устройства на загрузочный участок конвейера загружаются в необходимом количестве изделия 16. Рабочий ход подвижной рамы 7 с лежащей на ней платформой 8 начинается с ее перемещения посредством привода влево на опорных роликах 6 по направляющим 4. (Участок траектории между точками 1 и 2, фиг.4).
Грузовые ролики 15, перемещаясь вместе с подвижной рамой 7, достигают копиров 5 и, касаясь их, начинают подниматься Это происходит за счет того, что оси 14, скользя по односторонним выступам 11, поднимаются в выемки а и там фиксируются. Одновременно поднимаются планки 13 за счет взаимодействия их пазов б с пальцами 12 (участок траектории между точками 2 и 3). При дальнейшем перемещении грузовых роликов 15 по наклонным участкам копиров 5 подвижная рама 7 вместе с платформой 8 начинает подниматься (участок траектории между точками 3 и 4, фиг.4). Подхватывая изделие 16 на загрузочном участке конвейера неподЁижной рамы 7, подвижная рама 7 с платформой 8 (точка 4 на траектории движения платформы, фиг.4) поднимает их над неподвижной рамой 1 (точка 5 на траектории движения платформы, фиг.4) и перемещает в горизонтальном направлении до момента касания грузовых роликов 15 с выступами копиров 5 (участок траектории между точками 5 и 6). При этом упорный ролик 9 платформы 8 упирается в переднюю вертикальную направляющую 2 После этого опорные ролики 15 вместе с подвижной рамой 7 начинают подниматься по выступам копиров 5, перемещаясь одновременно и в горизонтальном направлении, а платформа 8, упираясь роликами 9 в переднюю вертикальную направляющую 2, начинает, скользя по подвижной раме 7, перемещаться вертикально вверх (участок траектории движения платформы между точками 6 и 7, фиг.4).
После достижения грузовыми роликами 15 вершины выступа копира 15, а платформой 8 верхнего вертикального положения (точка 7 на траектории движения платформы 8, фиг.4) изделие 16 автоматически фиксируется грузозахватным органом 17 перегрузочного устройства например, подвесного конвейера) и перемещается далее согласно технологическому процессу. После этого грузовые ролики 15 вместе с подвижной рамой 7 начинают скатываться по выступам
копиров 5, а платформа 8, скользя по подвижной раме 7, опускается вертикально вниз (участок траектории движения платформы между точками 7 и 8, фиг.4). При этом подвижная рама 7 опирается опорными ро- ликами 6 на горизонтальные направляющие 4, грузовые ролики 15 выходят из взаимодействия с копирами 5 и под действием собственного веса возвращаются в исходное положение, оси 14 выводятся из выемок а.
Подвижная рама 7 занимает крайнее левое положение при котором изделия 16, находящиеся на рабочем участке (транспортном) подвижной рамы 7, переместились на шаг, освободив загрузочный участок.
При обратном (холостом) ходе подвижная рама 7 перемещается на опорных роликах б по направляющим 4 вправо. При этом копиры 5, взаимодействуя с грузовыми роликами 15, отклоняют их влево, не вводя оси 14 в выемки а. Платформа 8 перемещается вместе с подвижной рамой 7 вправо до момента упора ее правого конца в заднюю вертикальную направляющую 3 (точка 9 на траектории .платформы, фиг.4), после чего она начинает скользить по подвижной раме 7, возвращаясь в исходное положение (точка 1 траектории, фиг.4). Грузовые ролики 15 выходят из взаимодействия с копирами 5 и под действием собственного веса также возвращаются в исходное положение.
Предлагаемая конструкция шагового конвейера позволяет перемещать транспортируемые изделия в горизонтальном положении с одной загрузочной позиции на
другую с одновременной передачей изделий на разгрузочном участке вертикально вверх на любое перегрузочное устройство согласно технологическому процессу. Вертикальное перемещение изделий согласно технологических требований может быть осуществлено и вертикально вниз, для чего копиры выполняются без выступа на конечном участке их взаимодействия с роликами.
Формула изобретения
1.Шаговый конвейер по авт. св. N 1159844, отличающийся тем, что, с целью расширения технологических возможностей конвейера путем обеспечения вертикального перемещения груза в конце шага перемещения подвижной рамы, он снабжен двумя закрепленными на неподвижной раме вертикальными неподвижными направляющими и установленной с возможностью возвратно-поступательного перемещения по подвижной раме платформой, расположенной между вертикальными неподвижными направляющими с возможностью поочередного взаимодействия с ними, при этом копиры выполнены с выступами, а грузовые ролики установлены с возможностью взаимодействия с выступами копиров в конце шага перемещения подвижной рамы при взаимодействии платформы с вертикальной направляющей.
2.Конвейер по п.1, отличающий- с я тем. что платформа имеет упорный ролик на ее переднем по ходу перемещения конце.

| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый конвейер | 1985 |
|
SU1240695A2 |
| Загрузочное устройство | 1984 |
|
SU1222604A1 |
| Шаговый конвейер | 1982 |
|
SU1051002A1 |
| УСТАНОВКА ДЛЯ ИЗГОТОВЛЕНИЯ ОБЛИЦОВОЧНЫХ ПЛИТ | 1993 |
|
RU2065806C1 |
| Устройство для перегрузки изделий | 1983 |
|
SU1181968A1 |
| Кран для погрузочно-разгрузочныхОпЕРАций HA пОдВЕСНОМ КОНВЕйЕРЕ | 1979 |
|
SU806587A1 |
| Установка для кирпича-сырца на полочные вагонетки | 1978 |
|
SU772869A1 |
| Шаговый конвейер | 1978 |
|
SU734092A1 |
| Шаговый конвейер | 1983 |
|
SU1159844A1 |
| МНОГОЯРУСНАЯ МЕХАНИЗИРОВАННАЯ АВТОСТОЯНКА | 1997 |
|
RU2120012C1 |
Изобретение относится к конвейерам с циклически движущимися грузоносителя- ми. Цель - расширение технологических возможностей конвейера путем обеспечения вертика/fbHoro перемещения груза в конце шага перемещения подвижной рамы. Для этого конвейер имеет неподвижную ра/б му 1 с жестко установленными на ней вертикальными направляющими (Н) 2. 3. с горизонтальными Н 4 и копирами 5. В Н 4 установлена подвижная рама 7, в верхней части которой с возможностью перемещения по ней установлена платформа 8 с упорным роликом 9. Платформа 8 установлена с возможностью поочередного взаимодействия с вертикальными Н 2, 3. Грузовые ролики установлены с возможностью взаимодействия с выступами копиров 5 в конце шага перемещения подвижной рамы 7 при взаимодействии платформы 8 с Н 2, 3. Это позволяет перемещать транспортируемые изделия 16 в горизонтальном положении с одной загрузочной позиции на другую с одновременной передачей изделий на разгрузочном участке вертикально вверх. 1 з.п ф-лы, 4 ил. (Л С ON СЛ 2 СЛ со го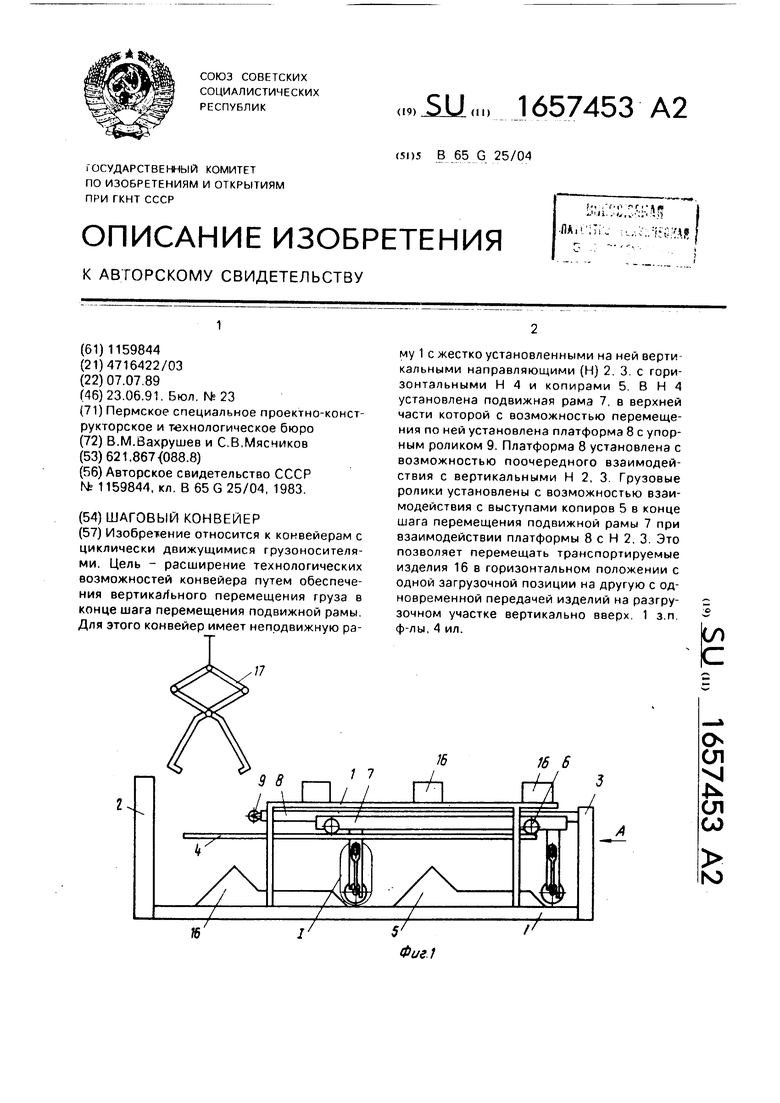
а
фие.1
7о
в
15
Фиг. 5
5 2
| Шаговый конвейер | 1983 |
|
SU1159844A1 |
| кл | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
