(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ . РАБОЧЕГО ОРГАНА МНОГОКОВ1ЮВОГО ЭКСКАВАТОРА
Известное устройство для управления / положением рабочего органа многоковшового экскаватора, включающее датчик положения рабочего органа, взаимодействующий с копирным тросом, и исполнительный ханизм с электромагнитами, из-за вибрации рабочего органа подает большое количество сигналов, непрерывно приводящих в, Ьэиже- . кие детали исполнительной системы устрОйстьа, сокращая их долговечность и надежность, в результате чего не всегда выдерживается заданная глубина копания.
В описываемом устройстве, с целью автоматического поддержания заданной глубины копания, к датчику положения рабочего органа подключены параллельные электрические цепи, в каждую из которых включены конденсаторы, соединенные с несимметричными триггерами, выходы которых, в свою очередь, например, через усилители соеди- иены с электромагнитами исполнительного механизма.
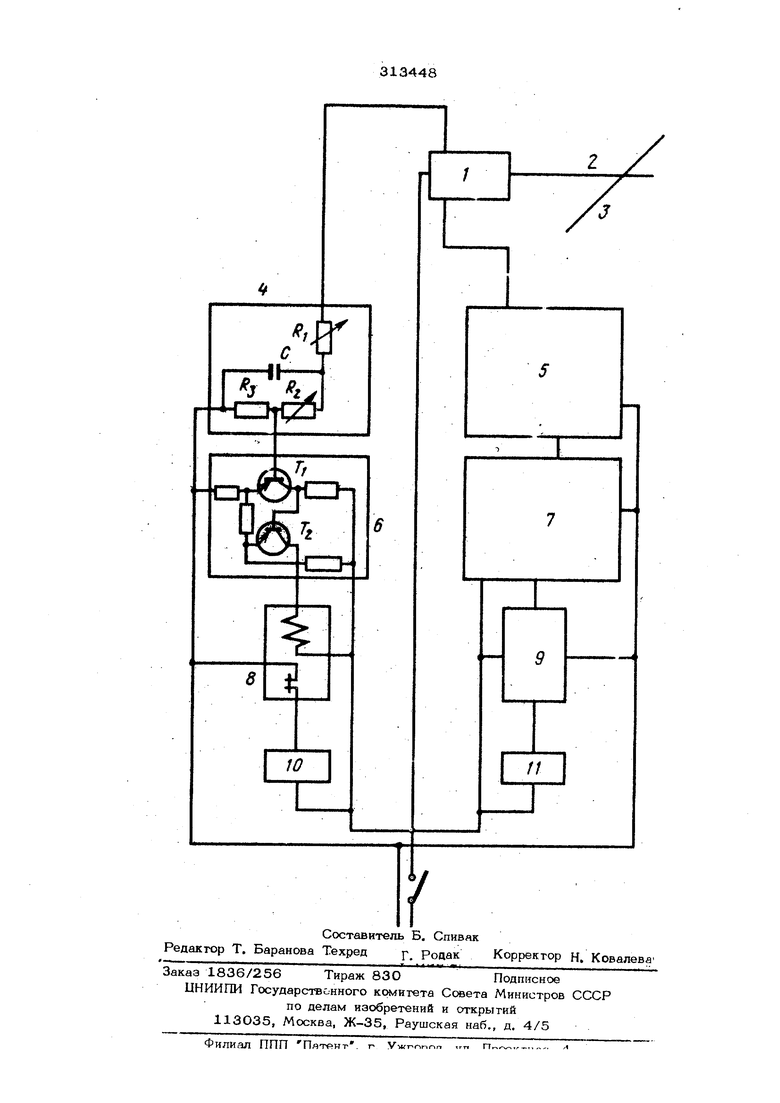
Оно содержит закрепленный на рабочем органе экскаватора датчик 1, взйимодействующий через щуп 2 .с копирным тросом 3 и подающий сигн.лы на входные блоки /4 и 5, которые через несимметричные триггеры 6 и 7 и усилители 8 и 9 управ электромагнитами 10 и 11 гидрозолотник исполнительной системы. Каждый входной имеет сопротивления R , R, Ri и конденсатор С. При заданной глубине копания от датчика 1 поступает электрический сигнал на входные блоки 4 и б, и кон денсаторы С заряжаются. Элементъг электрической цепи R , 1 , R и С подобраны так, I что на выходах триггеров 6 и 7, а также i на выходах усилителей 8 и 9 сигналы отI сутствуют и электромагниты 10 и 11 обесточены. При отклонении рабочего органа экскаватора от заданной глубины копания электрический сигнал от датчика 1 поступает только на один входной блок, напр-;мер на блок 5. В блоке 4 начинается разряд конденсатора С, в результате чего напр$ жение на входе триггера 6 уменьшается, Н при определенном уровне напряжения он переключается. Сигнал усиливается усилителем 8, и влектромагнит Ю включаегся, В реау.штаге исполнительная гидросистема возвращает рабочий орган экскаватора на оаданную глубину копания, восстанавливается сигнал датчика 1 на блоке 4 и система выключается. При этом, когда датчик 1 находится выше копирного трос:а 3 прерывается сигнал датчика, поступающий на входной блок, управляющий опусканием рабочего органа мсскаватс а, когда же дат ик 1 находится ниже троса 3, прерывается сигнал на входной блок, управляющий подъемом рабочего органа..
Включение системы происходит с аадерж ками, величина регулирую тся сопротивлениями R, и 1 .
При работе экскаватора в ретультате / вибрации рабочего , а вместе с ним и датчика 1 относительно троса 3 от датчика 1 на блоки 4 и 5 поступаю-: прерывистые сигналы. При .заданной глубине копания перерывы между этими сигналами спинаковы и продолжительность перерыва меньше, чем отрегулированная задержка включения системы.
При отклонении рабочего органа экскаватора от эадаНноЛ глубины копания переэывы между сигналами, п хпупаюшими на эдин из блоков 4 и 5, увеличиваются, а
поступаюодимЕ1 на другой блсяс соответственно уменьшается, и при определенной продолжительности перерыва система срабатывеет, соответственно поднимая или опус g ;.кая рабочий орган экскаватора. Б результат© перерывы между соответствующими сиг| налами будут уменьшаться до тэх пор, по ка их продолжительность станет меньше
отрегулированной задержки включения сисlg темы.
После чего исполнительная система выключается, и рабочий орган экскаватора усстанавливается на заданной глубинч.
Формула изобретения
Устройство для управления положением рабочего органа многоковшового экскаватора, включающее датчик положения рабочего органа, взаимодействующий с копирным
тросом, и исполнительный механизм с электромагнитами, отличающееся тем, что, с целью автоматического поддержания заданной глубины копания, к датчику положения рабочего органа подключены параш.ельные электрические цепи, в
каждую из которых включены конденсаторы, сс диненные с несимметричными триггерами, выходы которых, в свою очередь, например, через усилители соединены с элек тромагнитами исполнительного механизма.
| название | год | авторы | номер документа |
|---|---|---|---|
| ХЗНЧГСКАЯ БИБЛИОТЕКАХ.-Э. Э. Виирокi ч | 1966 |
|
SU185279A1 |
| Многоковшовый траншейный экскаватор | 1961 |
|
SU144441A1 |
| Датчик глубины копания рабочего органа дреноукладчика (его варианты) | 1981 |
|
SU1068580A1 |
| ДАТЧИК ГЛУБИНЫ КОПАНИЯ РАБОЧЕГО ОРГАНА ТРАНШЕЙНОГО ЭКСКАВАТОРА | 1970 |
|
SU269800A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ГЛУБИНЫ КОПАНИЯ К МНОГОКОВШОВОМУ ЭКСКАВАТОРУ | 1965 |
|
SU168192A1 |
| ЭКСКАВАТОР ДЛЯ ВСКРЫТИЯ ТРУБОПРОВОДОВ | 2019 |
|
RU2729632C1 |
| МНОГОКОВШОВЫЙ ТРАНШЕЙНЫЙ ЭКСКАВАТОР | 1967 |
|
SU204255A1 |
| Способ управления рабочим оборудованием экскаватора | 1978 |
|
SU885458A1 |
| Датчик глубины копания | 1974 |
|
SU560031A1 |
| Многоковшовый цепной экскаватор | 1987 |
|
SU1613542A1 |
/Г
.
-ОгвЙ 1
ft
