(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ГОРНОЙ МАШИНЫ

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматического управления положением разгрузочного конвейера горной машины | 1980 |
|
SU898059A1 |
| Отвалообразователь | 1975 |
|
SU606958A1 |
| Устройство для управления роторным экскаватором при планировке рабочей площадки | 1981 |
|
SU1040051A1 |
| Система автоматического ведения горнопроходческого щита | 1983 |
|
SU1122823A1 |
| Устройство для управления движением сочлененных транспортных тележек | 1991 |
|
SU1823824A3 |
| Устройство для контроля и управления роторным экскаватором | 1984 |
|
SU1208135A1 |
| Способ управления рабочим процессом бульдозера | 1985 |
|
SU1328449A1 |
| УСТРОЙСТВО КОМБИНИРОВАННОГО ОПТИМАЛЬНОГО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ЭКСКАВАТОРА | 1990 |
|
RU2030521C1 |
| Способ разработки месторождений полезных ископаемых подземным способом с использованием тоннелепроходческих механизированных комплексов | 2022 |
|
RU2801989C1 |
| ВСЕСОЮЗНАЯ IПЛТГНИ^ | 1971 |
|
SU310463A1 |
1
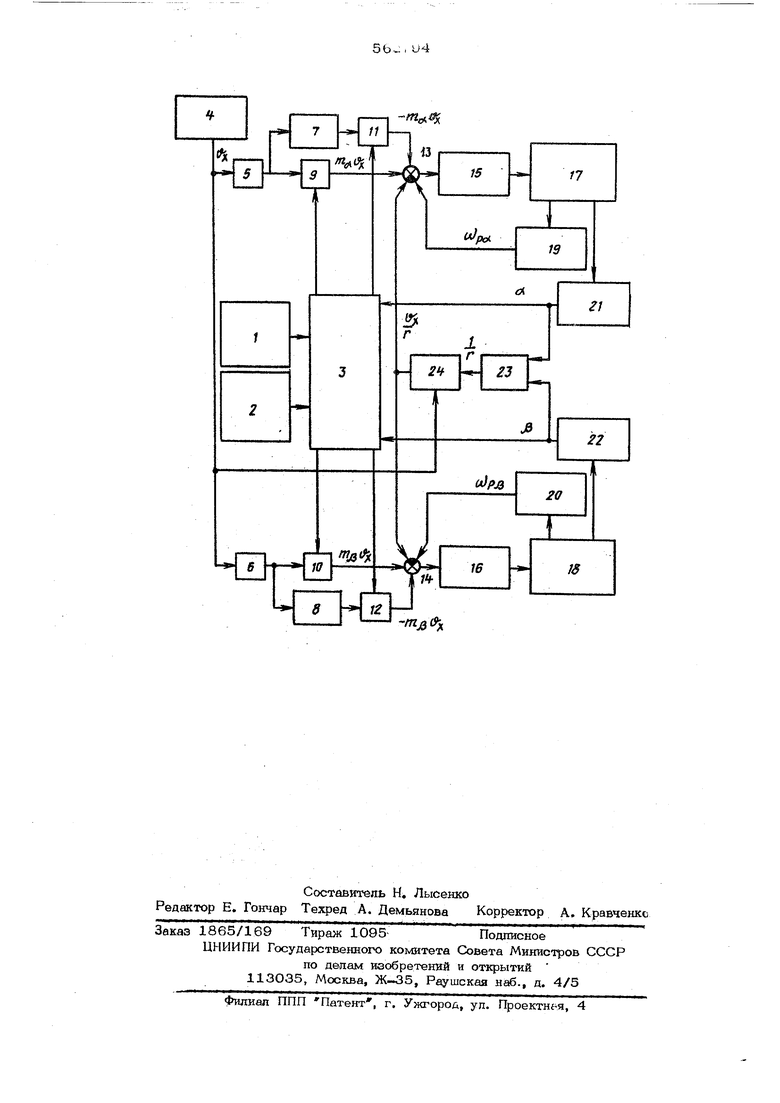
Изобретение относится к технике управления горными машинами и может быть использовано в угольной, горнорудной, строительной и других отраслях промышленноети, преимущественно в системах управления экскаваторами, отвалообразоватепями и другими машинами с гусеничным ходовым оборудованием, имеющим приводы разворота тележек.
При выполнении горных и строительных работ во многих случаях требуется обеспечить движение машины (экскаватора, отвалообразователя и т. п.) строго по заданной трассе, чаще всего прямолинейной, в соответствии. с планом раз- вития экскаваторных или отвальных работ. Отклонения машины от заданной трассы должны эффективно устраняться, в связи с чем применяют устройства дпя автоматт ческого управления движением мащины по заданной трассе. ,
Известен ряд устройств аналогичного назначения, Например, система, включающая устройство для автоматического управления движением роторного экскаватора пд заданной трассе и объект управления (роторный экскаватор). Часть модели, относян щаяся к устройству управления движениеМ| содержит чувствительные элементы для оп-« ределения величин, зависящих от бокового и углового отклонений экскаватора от заданной трассы, а также позиционный регулятор, воздействующий на привод разворота
ходовых тележек l} . Чувствительные элементы форм;1руют стп:налы, первоначально представляющие собой линейные комбинации бокового и углового отклонений экскаватора от заданной трассы. Привод разворота
тележек отрабатывает эти сигналы с цепьЬ устранешш отклонений экскаватора от заданной трассы. Однако неоптимальность процесса ликвидации отклонений, имеющего характер незатухающих колебаний (рыс-
кания), объясняется структурными свойствами устройства и принятым законом управления (по комбинациям бокового и углового отклонений экскаватора от заданной трассы) и не может быть устранена выбсм
ром параметров и настройкой устройства. Кроме того, в этом устройстве не предусмотрело ограничение ннтенс1шности раз- ворота ходовых тележек относительно грунта, что может привести к перегрузкам и 11реждевреме1шому износу механизма и привода разворота тележек, как и самих ходовых тепежек. Другое устройство, предназначенное дпя управления движением экскаватора по задшшой прямолинейной трассе, содержитблок задшпш трассы движенЖ, блок определе 31ИЯ отклонений экскаватора рт задазшой трассы и гидропривод разворота тележек 2. Блок определения отклонений формирует сигнал, зависящий от бокового и углового .отклонений экскаватора от з аданной грассы, i и при первом рассмотрении представляет собой линейную комбинацию бокового и углового отклонений. Гидропривод разворота тележек отрабатывает этот сигнал с целью устранения отклонений экскава тора от заданной трассы. Как и в предыдущем случае, устройству свойственнанеоптимапъностъ процесса ликвидации отклонений имеющего характер незатухающих колебаний и вызвана текги же причинами, что и в первом устройстве. Наиболее близким, к изобретению по тех нической сущности является устройство для управления движением , горной машиной, содержа1цее блок задания параметров трассы движения, блок определения координат и приводы разворота ходовых тележек с концевыми выключателями 2. ОЬобенностью устройства является полная независимость контуров управления передними и задними теле лжами, так что практически управление движением экскаватора с двумя механизмами разворота сведено к автономному управлению отдель но передними и задними тележками. Блоки определения отклонений формируют сигналы зависящие от боковых и угловых отклонений перед гах и тележек от заданной трассы и первоначально представляющие собой линейные комбинации боковых и угловых отклонений. Приводы разворота передних и задних тележек отрабатывают эти сигналы с целью устранения отклонений тележек от заданной трассы. устройству свойствен)Ш1 все те же недостатки, что и двум первым. Цель изобретения - обеспечение минимальной длины пути выхода карьерной мащины на зада1шую трассу, повышение точности управления движением мащины и ограничение интенсивностой разворота ходо-« вых тележек относительно грунта, т. е. по- .вышение эф1|)ективпости управления. Достигается это введе.иием в устройство блока оптимального управпетш, блока умножения, функционального преобразователя и каналов преобразования регулируемых величин, каждый из которых содержит регулятор скорости разворота, датчик углов разворота, сумматор, датчик скорости, ключи и блок масштабирования, выход которого через первый ключ подключен к первому входу сумматора и через последовательно соединенные инвертор и второй ключ подключен к второму входу сумматора, выход последнего через последоэательно соединенные регулятор скорости разворота и привод разворота ходовых тележек с концевыми выключателями соединен соответственно с входами датчика углов разворота и датчика скорости, выход которого подключен к третьему входу сумматора каждого канала преобразования регулируемых величин. Выходы блока задания параметров трассы движения и блока определения координат соединены соответственно с первым и вторым входами блока оптимального управления, первые и вторые выходы которого подключены соответственно к управляющим входам первого и второго ключа каждого канала преобразования регулируемых величи.н, выход датчика углов разворота каждого из которых соединен с соответствующим входом, блока оптимального управпения и функционального преобразователя выход которого подключен к первому входу блока ум.ножения. Выход блока умножения соединен с четвертым входом сумматора каждого канала преобразования регулируемых величин, вход блока масщгабирования каждого из которых и второй вход блока умножения подключены к выходу датчика скорости хода, БЛОК оптимального управления представляет собой специализированное вычислительно-логическое устройство, реализующее алгоритм оптимального быстродействия с ограничениями на управление и на фазовые координаты. Оообенностью использования блока оптимального управления в предлагаемом устройстве является то, что в алгоритме оптимального быстродействия в качестве независимой переменной (аргумента :) выступает не время , а путь горной мащины. Сумматоры, регуляторы скоростей, разч ворота, приводы разворота и датчики скоростей разворота образуют замкнутые контуры автоматического регулирования скоростей разворота, которые обеспечивают требуемые соотнощения скоростей развороте ходовых тележек и скорости хода, завися- щие от максимально допустимых п.нтенсив- ностей разворота ходовых тепежек относительно грунта н от углов разворота топе- жек относительно корпуса машины, На чертеже дана блок-схема предпага- емого устройсЛгва. Устройство для унравления движением горной машины содержит блок 1 задания параметров трассы движения, блок 2 определения координат, блок 3 оптимального управления, датчик 4 скорости хода, блоки 5 и 6 масштабирования, инверторы 7 и 8, первые ключи 9 и 10, вторые ключи 11 и 12, сумматоры 13 и 14, регуляторы 15 и 16 скоростей разворота, приводы 17 и 18 ра ворота ходовых тележек с концевыми выключателйми,датчики 19 и 20 скоростей Рззворота, датчики 21 и 22 углов разворота, функциональный преобразователь 23 и блок 24 умножения, Параметры заданной трассы, вводимые в устройство с помощью блока 1, характе ризуют форму и положение заданной; трасс движения карьерной машины в плоскости возможного ее перемещения, а также зада ный угол разворота машины в этой плоск ти, Например, прямолинейная заданная тра са движения, описываемая уравнением . в плоскости V, , V , характеризуется Параметрами Аи В; третьим пара метром является заданный угол f.g разворота машины, Блок 2 служит для определения фактических координат горной машины в той же плоскости V, , М координат V. , V и угла ( разворота машины, в Блок 3 оптимального управления, получающий информаисию от блока 1 задания параметров трассы-движения (например, параметры А, В и tp при прямолинейной заданной трассе), блока 2 определения ко ординат (координаты V , Vj в ) и датчиков 21 и 22 углов разворота ог и/3 ходовых тележек относительно корпуса ма шины, служит для выработки команд на включение приводов 17 и 18 разворота хо довых тележек в том или ином направлении в соответствии с алгоритмом оптимал ного управления. Датчик 4 скороста хода служит для выработки сигнала, пропорционального скорости Vy движетгя горзюй машины, Блоки 5 и 6 маси1твбирован1ш служат для ук-шожения этого сигнала на постоянные масштабные коэффипненгы Н,, /(0(|ддд, и , представляюшие собой абсолютные значения ктаксггмальло допустимых интенсивностей разворота ходовых тележек относитпл . 1од интенсивностями разворота понимаются производные углов разворота тележек относительно грунта по пройденнок у Ьути X doC . dot1 d Е d е /Ь) ,., i dE (c,/5) где oc и уэ -. углы разворота ходовых тележек относительно грунта, « и /3 - углы разворота ходовых тележек относительно корпуса машины, 2 - путь, , ,- радиус кривизны траектории движения машш1Ы, зависящей от углов of и /Э Инверторы 7 и 8 служат для получения сигналов, противоположных по знакам сиг налам на выходах блоков 5 и 6, Ключ 9 и 10 служат для пропускания сигналов т V ключи 11 и 12 - для пропускания инверсных им сигналов -т У - суммирующие входы сумматоров 13 и 14 по коман1 дам на включение приводов 17 и 18 раз- ворота ходовых тележек, поступающим из блока 3 оптимального управления. Как известно, перегрузки и износ ходового оборудования зависят от интенсивное- тей разворота ходовых тележек относитель но грунта, поэтому при управлении движе нием горной машины необходимо обеспечить ограничение этих интенсивностей их, максимально доп стимыми значениями, С другой стороны, из условия оптимальности управления в смысле кшнимума длины пути выхода машины на заданную трассу вытекает необходимость поддерживать .ально допустимые постоянные значешш янтенсивностей разворота ходовых тележек относительно грунта на каждом интервале управления между моктенташ включения, реверсирования и отключения пр11водов разворота ходовых тележек. Для выполнения этого условию на каждом интервале управлетш необходимо поддерживать определе1шые соотношения скороетей ( ибОрд разворота ходовых теле- хода, равные ек и скорости кК/Ь)(ос,|5) ;--im,x«,p) («,/3)-. илйГ чго тэ же самде; соотношения ,t (o(,/Э)J p/j-x - /i .(c («,/3)Г Для получения сигналов, пропорционалы.иых скоростям I разворота ходовых тележек спужат датчию 19 и 20 скоростей разво рота, а для пипучеяня , пропордао- налыюго величине гГлТй ривизне тра ектории дв51жения машины) г $ункдаюнапьный преобреэоватепь 23, попучвоищй ин формаигао от датчиков 21 и 22 угпов.разворота. Блок 24 умножения слуяа-1т для получе.ния с.игнала, пропорционального вет-гаине : pTjTn, и подаваемого на .вычигающиё входы сумматоров 13 и 14, Для поддержания требуемых соотношений скоростей (л)о( и L)p4« разворота ходовых тепежек и скорости V. хода служат регуляторы 15 и 16 скоростей разворсл.а, которые вместе с приводами 17 и 18 разворота ходовых тележек, датчиками 19. и 2О скоростей разворота и сумматорами 13 и 14 образуют замкнутые контуры автоматического регулирования с отрицательными обратными связями по скорое тям. разворота. Предпагаемое устройство для автомати- ческого управления движением горной маши ны работает спедующим образом, В общем случае в исходном положетш горная машина находится вне заданной трассы движе1шя и задача устройства cf стоит в том, чтобы, воздействуя на машину Ьна вышла на заданную-трассу, причем, длиka пути выхода на заданную трассу должна быть минимальной при условии ограничения интенсивностей разворота ходовых тележек относительно грунта. При включении устройства машинистом горной машины блок 2 определения координат вырабатывает сигналы, пропорционал ные фактическим, координатам V .V, и в плоскости V. 2 возмож ного ее перемещения, датчики 21 и 22 углов разворота ходовых Veлeжeк выраба тывают сигналы, пропорциональные углам Л и ft разворота ходовых тележек относительно корпуса машины , и функциональны преобразователь 23 вырабатывает сигнал, зависящий отуглов « и уЗипропорциональн величине ргуПа) включения устройства машинист с помощью блока 1 зада- ния параметров трассы движения вводит эти параметры (например, при прямолиней ной заданной трассе - параметры А, В, Ф , ) в блок 3 оптим.апьного управления, который в зависимости от координат Vj V., if машины, углов ос и разворота ходовых тележек и параметров задан -ной трассыВырабатывает команды иавклю чение приводов 17 и 18 разворота ходовых тележек в том или ином, направлении, - в соответствии с алгоритмом Ъптимапь- Ужг/теп;;-.:з: 763-77 г„ т; 00. лого yiipaBrieHvra. Эти комалды поступают iia разрешающие входы ключей 9 (ипиИ) и 10 (ипи 12) и тем самым подготавливают их к npoirycKainno сигналов от дат- чика 4 скорости хода. После этого машинист включает привод хода, перемещающий горную Mamis5-ryj и датчик 4 скорости хода вырабатывает сигнал, пропорциональный этой скорости. Сигнал, пропорциональный скорости .у хода, масштабируется в блоках 5 и 6 масштабирования и инвертируется в инверторах 7 и 8. В зависимости от того, какие из ключей открыты ( 9 или 11,10 или 12), масштабирова.шш1е сигна ПЫ в прямой ( , ) версией (-ttt V, sHirt x ) форме поступакиг на суммируЮБше входы сумматоров 13 и 14. Кроме того сигнал, пропорщюнальный скорости V хода, укгаожается в блоке 24 умножения на величину, пропорциональную ) , и результируюидий сигнал, про- порциональный произведегшю тупают на вычитающие входы сумматоров 13 и 14. На выходах сумматоров 13 и 4 появвяются сигналы, воздействующие на входы регуляторов 15 и 16 скоростей.раап ворота и Вызывающие в конечном счете включение приводов 17 и 18 разворота ходовых тележек в направлениях, определяемых тблоком 3 оптимального управления. Датчики 19.и 2О скоростей разворота вырабатывают сигналы, пропорциональные фактическим скоростям и бОр разворота ходовых тележек относительно корпуса машины. Эти сигналы поступают на вычитающие входы сумматоров 13 и 14. Замкнутые контуры автоматического регулирования, образованные сумматорами 13 и 14, регуляторами ,15 и 16 скоростей разворота, приводами 17 и 18 разворота ходовых, те лежек и датчиками 19 и 20 скоростей разворота обеспечивают поддержание требуемых cdoTirotiie- НИИ скоростей 00.,, .А разворота тележек и; скорости V хода и тем самым, поддержание максимально допустимьГз постоянных значений интенсивностей разво- рота ходовых тележек относительно грунта. По мере перемещения машины в плоскости V , V. изменяются ее фактические координаты V , V и (f j одновременно изменяются углы сх и уЗ разворота ходовых тележек относительно корпуса машины. Углы PC и уЭ могут достигнуть свои предельные значения о( Ри этом пр1шоды разворота отключаются концевыми выключателями. Изменение координат V., У„ и f машины и углов «г и уЗ разворота ходовых тележек в процессе движения машцньг при- водит к изменению ком.а1-щ на выходах бло ка 3 оптнма.чыюго управления и в конечно счете к реверсяровани;о гтривода разворота ошюй из ходорых тележек в соответствии с алгоритк-гом оптимального управлегаш, после чего замкзгутый контур автоматичеа кого регулирования скорости разворота это тележки обеспечивает поддержание требуе м.ого соотношения скорости разворота теле ки и скорости хода до следующего реверсирования нривода разворота, , Дальнейшее-изменение углов сх: н /Э разворота ходовых тележек и координат V . , Y Pn маигины в процессе ее движения приводит к соотвеахзтвуюшим изменениям, комянд на выходах блс д 3 оптимального управлентш, вызывающи;,. реверсирова1Ше приводов разворота ходовых тележек. Описанный процесс управления заканчивается после нескольких переключйшй при водов разворота в момент выхода машины на зада.нную трассу, когда ее координаты V V , ф.д и углы а п ft разворота ходовых тележек отвечают уравнению заданной трассь, причем действительный угол i{3.g разворота машины равен зaдaннo Iy уг- У Если нри дальнейшем движении машины возникают отклонения ее от заданной трассы, то предлагаемое устройство вновь вступает в действие и работает, как описа но выше. Использование устройства для автоматического управления движением горной машины позволяет обеспечить минимальную длину пути выхода машины на заданную трассу, повысить точность движения машины по заданной трассе и тем самым повысить качество ведения горных работ, что особенно важно- при формировании площадок экскаваторных выступов, при селек тивной выемке ископаемых, при проведении подготовительных горных выработок, при строительстве земляных сооружений. Кроме того, применение устройства обе печивает ограничение интенсивноетей разворота ходовых тележек относительно грун та и тем самым уменьшен иена грузок на xoдовые тележки, механизмы и прдаоды разворота, уменьшение их износа и увеличение долговечности. Формула изобретения Устройство для управления движением горной машины, содержащее блок задашш napaNfeTpoB грассЕл движения, блок опредг ления координат и приводы разворота ходовых тележек с кo.нцeпы лI выключателями, отличающееся тем, что, с цельк. пшзьпцелия э4 фсктивности управлеliUH.D устройство введены блок оптимального улравлепкя, блок умзюжения, функци- оналЬ1Ый преобразователь и каналы преобразования регулируемых величин, каждый из которых содержит регулятор скорости разворота, датчик углов разворота, сумматор, датчик скорости, ключи и блок масштабирова1{ня, выход которого через первый ключ под1слючен к первом входу суммато- ра и через псспа.цоп.ательно соединенные i:;mepTop н второй ключ подключен к вто- po, Exo,ii;;- сул,агора, которого через последовательно соединенные регулятор скорости разворота я привод разворота хо- довых тележек с концевыми выключателями соединен соотвттственно с входами датчика углов разворота и датчика скорости, выход которого подключен к третьеьту входу сумматора калщого 7санала преобразования регулируемых величин, выходы блока задания параметров трассы движешш и блока определения координат соедннены соответственно с первым н вторьм входами блока оптимальгного управления , первые и вторые выходы которого подключены соответственно к управляющим входам первого и второго ча каждого канала преобразован1Ш регулируемых величин, выход датчика угпов разворота каждого из которых соедннен с соответствующим входом блока оптимального управлезпш и функционального преобразователя, выход которого подключен к пер вому входу блока умножения, выход блока умножения соедтшенс четвертым входом сумматора каждого канала преобразования регулируемых величин, вход блока масштабирования каяадого из которых и второй вход блока у.множения подключены к выходу датчика скорости хода, , Источники информации, принятые во внимание при экспертизе . 1,Автоматизация производственных процессов на открытых горных разработках, Киев, Техника , 197О,, стр. 48-54. 2,Авторское свидетельство СССР № 191671, М. кл G 05 D 1/02, от 20.О5.65. 3. Автоматизашш производственн1г1Х процессов на открытых горных разработках, Киев, Техника, 19G5r. стр. 45 - 52,
