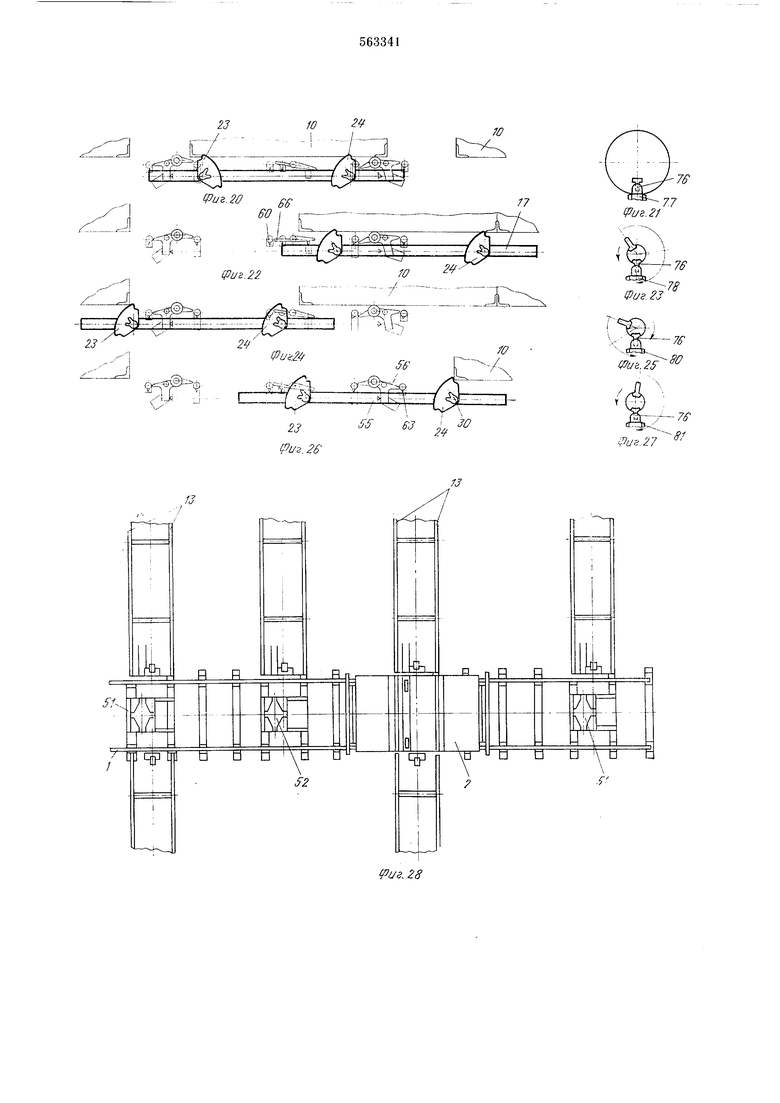
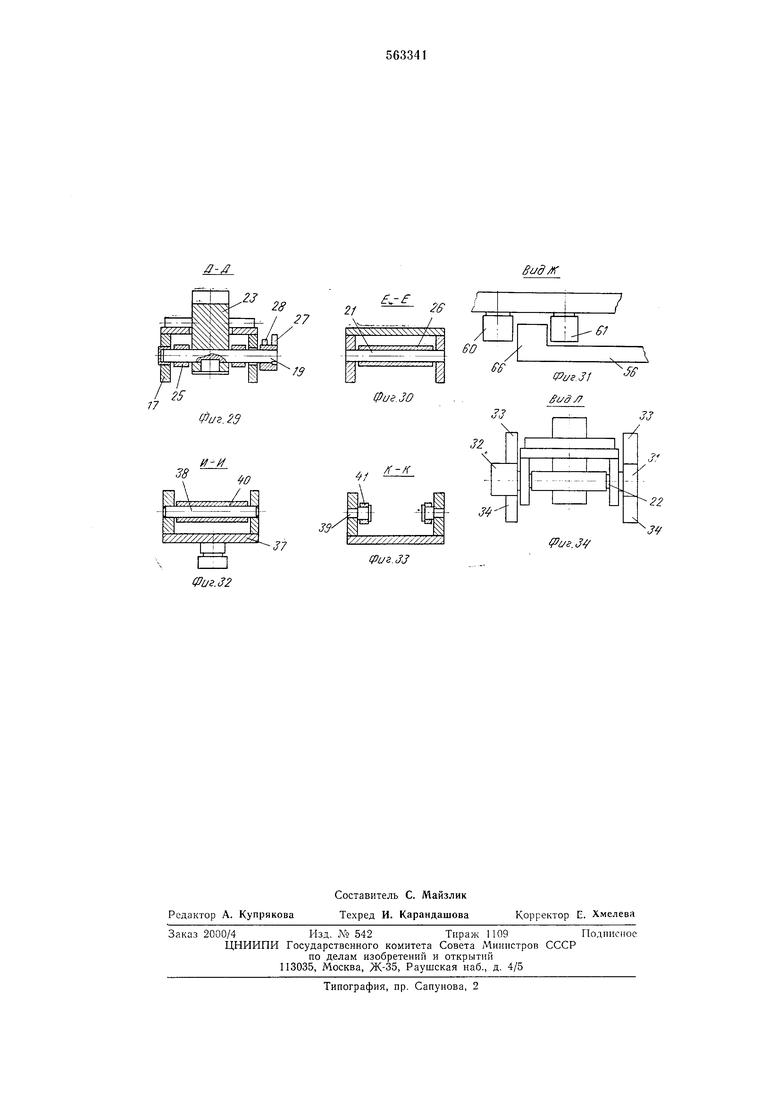
ральных путей; па фиг. II-разрез по Г-Г па фиг. 7; на фиг. 12-схема расположения толкателей, рычагов и упоров механизма приема и выдачи вагонетки перед пог.рузкой последней на тележку; на фиг. 13-положение флажка командоанпарата перед приемом вагонетки на телел ку; на фиг. 14-схема по фиг. 12, положение элементов в конце первого хода штанги при приеме вагонетки; на фиг. 15-положение флажка командоаппарата в конце первого хода штанги при приеме вагонетки; на фиг. 16 - схема по фиг. 12, положение элементов в конце второго хода штанги при приеме вагонетки; на фиг. 17-положение флажка командоаппарата в конце второго хода штанги при приеме вагонетки; на фиг. 18- схема по фиг. 12, положение элементов в конце третьего хода штанги при приеме вагонетки; на фиг. 19-положение флажка командоаппарата в конце третьего хода штанги при приеме вагонетки; на фиг. 20 - схема по фиг. 12, полол ение элементов в конце четвертого хода штанги при приеме-вагонетка погружена на тележку; на фиг. 21-положение флажка командоаппарата в конце четвертого хода штанги при приеме вагонетки; на фиг. 22 - схема по фиг. 12, положение элементов в конце первого хода Н1танги при libiдаче вагонетки; на фиг. 23-положение флажка комапдоаннарата в конце первого хода штанги при выдаче вагонетки; на фиг. 24-- схема по фиг. 12, положение элементов в конце второго хода штанги при выдаче вагонетки; на фиг. 25-положепие флажка комапдоаппарата в конце второго хода штапги при выдаче вагонетки; на фиг. 26 - схема по фиг. 12, положение элементов в конце третьего хода штанги при выдаче вагонетки - вагонетка выдана на магистральный путь; на фиг. 27-положение флажка командоанпарата в конце третьего хода штанги при выдаче вагонетки; на фиг. 28-предложенное устройство, в плане; на фиг. 29-разрез по Д-Д на фиг. 3; на фиг. 30-разрез по Е-Е на фиг. 6; на фиг. 31-вид по стрелке Ж на фиг. 3; на фиг. 32 - разрез по И-И на фиг. 6; на фиг. 33-разрез по К-К на фиг. 6; па фиг. 34 - вид по стрелке Л на фиг. 2.
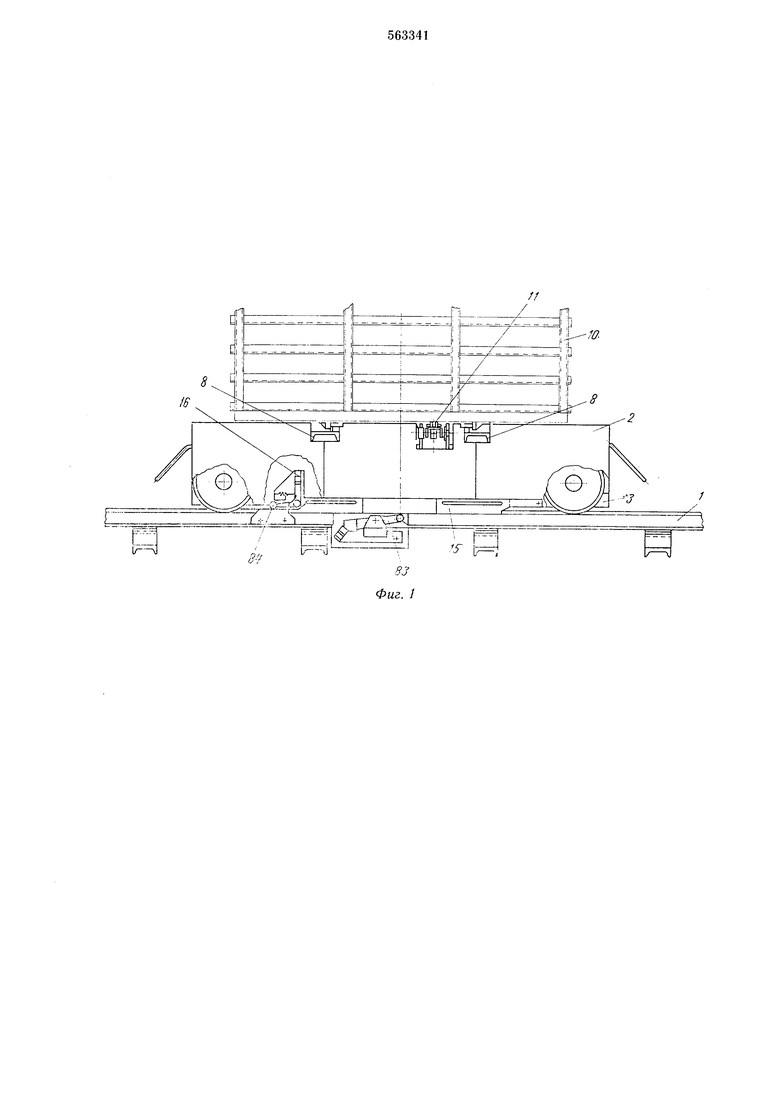
Устройство содерлсит поперечные рельсовые пути 1 и установленную на них траверсную тележку 2, выполнепщас в виде рамы 3 с продольным пазом 4, на которой смонтированы две пары ходовых колес 5 и 6, одна из которых пара колес 5, приводная, привод 7 перемецдепия телел ки, отрезки рельсов 8 с ребрами 9 для размещения вагонетки 10 и ограничения ее перемещения в направлении движения тележки. На раме 3 также размещен механизм 11 приема и выдачи вагонетки, механизм 12 точной установки тележки относительно магистральных путей 13, привод 14 механизмов И и 12, копир 15 переключения скорости телелски, датчик 16 выключения привода 7.
Механизм 11 приема и выдачи вагонетки состоит из выдвижной штанги 17 с корпусом П-образного сечения, расположенного основанием кверху, в котором имеются вырезы 18. В боковых стенках корпуса установлены валики 19 и 20 и оси 21 и 22. Внутри корпуса штанги 17 на валиках 19 и 20 закреплены соответственно поворотные толкатели 23 и 24, входящие в вырезы 18, и установленные с
возможностью вращения ролики 25, а на осях 21 и 22 - ролики 26. Ролики 25 и 26 штанги 17 образуют цевочную рейку.
С наружной стороны корпуса штанги 17 на валиках 19 и 20 закреплены рычал ки соответетвенно 27, 28 и 29, 30. Рычал ки 27 и 28 находятся в разных диаметральных плоскостях ступицы и расположены вдоль ее оси на некотором расстоянии друг от друга. Аналогично выполнены рычажки 29 и 30.
С протпвополол ной етороны корпуса штанги 17 на осях 22 установлены катки 31 и 32, размещенные между направляющими 33 и 34, укрепленными на стойках 35 и 36 рамы 3. Катки 32 установлены на крайних осях и выполпены шире катков 31 для возмол ноети взаимодейетвия с упорами (на чертелсе не показаны), расположенпы.ми на магистральных путях 13 и предохраняюши.ми вагонетку от произвольного екатывания с носледпих.
Механизм 12 точной установки тележки относительно магистраль)1ых путей 13 состоит из выдвил ной штанги 37, корпус которой имеет П-образное сечение, расположеипое основанием книзу. В боковых стенках
корпуса зстановлены оси 38 и по краям корпуса - полуоси 39, на которых внутри корпуса размешены с возмол-сностью вращения соответственно ролики 40 и 41, образ асщие цевочную рейку. С наружной стороны корпуса па полуосях 39 установлены с возможностью вращения катки 42, размешенные направляющими 43 и 44, прикрепленными соответственно к стойкам 35 и 36 и раме 3. Для удерлчивания щтанги 37 в крайних полол ениях на боковой стенке ее корпзса укреплены два кронштейна 45 с пазом 46, а на раме 3 размещены два подпружиненных рычага 47, каждый из которых снабжен роликом 48, взаимодействующим с пазом 46. Коснованию корпуса щтанги 37 крепится вертикальная ось 49, па которой с возможностью вращения установлен ролик 50, а между рельсами поперечных путей 1 у каждого магистрального пути 13 установлены паправляющие 51, образующие клиновидный паз 52.
Приспособление для поворота толкателей 23 и 24 состоит из двуплечих рычагов 53-55, имеющих плечи 56 и 57, и поворотных упоров 58-63 смонтированных на направляющей 33
со стороны рычажков 27-30 с возможностью качания. Рычаги 53 и 54 снабжены соответственно роликами 64 и противовесами 65. На плече 56 рычага 54 имеется выступ 66. На стойках 35 укреплены регулируемые упоры
67 для ограничения поворота рычагов 53 и
55, а на стойке 36 - магнит 68, ограничивающий поворот рычага 54.
Общий привод 14 механизма И нриема и выдачи вагонетки и механизма 12 точной установки тележки имеет звездочку 69, которая снабжена двумя венцами, имеющими на участке 70 меньшей толщины, а на участке 71 - нормальные. Звездочка 69 установлена с возможностью взаимодействия с цевочными рейками, образуемыми роликами 25 и 26 щтанги 17 и роликами 40 и 41 штанги 37.
Для предотвращения перекосов в горизонтальной плоскости штанги 17 и 37 снабжены роликами 72 и 73, установленными на вертикальных осях и взаимодействующими соответственно с боковой поверхностью верхних направляющих 33 и пазом 4 рамы 3.
Устройство снабжено командоаппаратом74, установленным на раме 3, валик 75 которого кинематически связан с приводом механизмов И и 12. На валике 75 закреплены флажки 76, взаимодействующие с бесконтактными конечными выключателями 77-82.
На поперечных путях 1 возле направляющих 51 установлены датчики 83 переключения скорости тележки и копиры 84 останова тележки.
Работа устройства в автоматическом режиме по заданной программе осуществляется следующим образом.
С пульта управления (на чертеже не показан) дистанционно задается тележке 2 программа, с какого и на какой магистральный путь следует передать вагонетку 10.
Поступившие сигналы в систему автоматического управления тележки 2 включают привод 7. Одновременно сигнал поступает в датчик 83 того магистрального нути, с которого загружается вагонетка 10. Тележка 2, двигаясь Б направлении указанного магистрального нути, копиром 15 взаимодействует с датчиком 83, переключая скорость привода 7 на низшую ступень. На малой скорости тележка движется до момента взаимодействия датчика 16 с копиром 84, после чего происходит выключение привода 7 и остановка тележки 2. В этом положении ролик 50 находится в клиновидном пазу 52 направляющих 51 (см. фиг. 9). Датчик 16 одновременно с отключением привода 7 включает привод механизмов 11 и 12. Нри этом звездочка 69, вращаясь, зубьями, расположенными на участке 70, взаимодействует с роликами 25 и 26, перемещая щтангу 17 в нанравлении магистрального пути 13, на котором размещена вагонетка 10. При взаимодействии зубьев участка 71 с роликами 40 штанга 37 перемещается в противоположную сторону. При этом ролики 73 перемещаются в пазу 4 рамы 3.
Ролик 50 штанги 37, взаимодействуя с одной из направляющих 51, перемещает тележку 2 в соответствующую сторону до момента входа ролика 50 в паз (см. фиг. 10). В этом положении отрезки рельсов 8 тележки 2 точно совмещаются с рельсами магистральных
путей 13, движение штанги 3/ прекращается вследствие того, что зубья участка 71 звездочки 69 вышли из зацепления с роликами 40 (см. фиг. 8, И). При этом штанга 17, продоллсая движение, катком 32 открывает упор, предохраняющий вагонетку 10 от скатывания с магистрального пути 13, а толкатель 24 при встрече с вагонеткой 10 несколько наклоняется, проходя под передней связью рамы каркаса вагонетки, и затем снова занимает первоначальное положение (см. фиг. 14). В этот момент флажок 76 командоанпарата 74 вводится в паз бесконтактного конечного выключателя 78 (см. фиг. 15), сигналы которого
поступают на реверс привода 14 и включение электромагнита 68 и тормоза указанного привода, фиксирующего тележку 2 в занятом ею положении до завершення накатывания вагонетки 10 на тележку.
Электромагннт 68, взаимодействуя с плечом 57 рычага 54, поворачивает последний и вводит выступ 66 в зазор между упорами 60 и 61 (см. фиг. 5, 31), ограничивая их поворот навстречу друг другу. Реверсируя, нривод 14
нере.мещает штангу 17 в сторону тележки, в результате чего толкатель 24, контактируя с передней связью рамы каркаса вагонетки 10, частично накатывает ее на тележку (см. фиг. 16).
При этом поперечная связь рамы вагонетки 10, взаимодействуя с роликом 64 рычага 55, вводит плечо 57 в контакт упором 62 и удерживает последний от поворота вправо, не препятствуя его повороту в противоположном
нанравлении. Одновременно плечо 56 выводится из контакта с упором 63, и он может поворачиваться в обе стороны (см. фиг. 4). Вследствие этого толкатель 24, не изменяя своего ноложення, доводит вагонетку 10 до
ноложення, показанного на фиг. 16, в то время как рычажок 27, взаимодействуя с упором 61, удерживаемым выступом 66, поворачивает толкатель 23 и рычажок 27 в положение, изображенное на фиг. 16.
Когда флажок 76 входит в паз конечного выключателя 79 (см. фиг. 17), от последнего поступает сигнал на реверс привода 14 н отключение электромагнита 68. Штанга 17, изменив направление движения, подводит рычажок 29 с толкателем 24 к упору 62 и, поскольку поворот последнего ограничен плечом 57 рычага 55, рычажок 29, взаимодействуя с упором, поворачивается вместе с толкателем в положение, показанное на фиг. 18.
Двилчение штанги 17 вправо продолжается до тех пор, пока толкатель 23 не окажется сзади передней связи рамы каркаса вагонетки 10. В этом положении флажок 76 взаимодействует с конечным выключателем 78 (см.
фиг. 19), и от последнего поступает сигнал на реверс привода 14. Штанга 17, двигаясь в сторону тележки 2, нодводит толкатель 23 к передней связи рамы каркаса вагонетки и, взаимодействуя с ней, перемещает ее на тележку. Когда штанга 17 достигнет исходного
положения (см. фиг. 20), флажок 76 взаимодействует с конечным выключателем 77 (см. фиг. 21), сигнал от которого иоступает на выключение привода 14, его тормоза и включение привода 7 перемещения тележки 2.
Таки.м образом, совершив два хода в сторону магистрального пути 13 и два хода обратно в сторону телел ;ки, штанга 17 перемещает вагонетки с магистрального пути на тележку. При этом толкатели 23 ,и 24 находятся в ноложении, обеспечивающем фиксацию вагонетки 10 во время ее транспортировки, а штанга 37 - в исходном положении (см. фиг. 20). Тележка 2 с вагонеткой 10 отправляется к магистральному пути, заданному по программе, и здесь останавливается, стыкуется и фиксируется аналогично описанному выше.
После остановки привода 7 включаются привод 14 и электромагнит 68. Начинается процесс передачи вагонетки 10 с тележки 2 на заданный магистральный путь 13. Толкатель 24, взаимодействуя с передней связью каркаса, накатывает частично вагонетку на . магистральный путь 13. Рычажок 28, встречая на своем пути удерживаемый выступом упор 60, взаимодействует с ним, поворачивая толкатель 23 в положение, показанное на фиг. 22.
При взаимодействии флажка 76 с .конечным выключателем 78 от последнего поступает сигнал на реверс привода 14 « отключение электромагнита 68. В процессе перемещения штанги 17 в сторону тележки толкатели 23 и 24, проходя под связью каркаса рамы вагонетки 10, несколько отклоняются и в крайнем положении штанги оказываются вне каркаса (см. фиг. 24). При взаимодействии флажка 76 с конечным выключателем 80 (см. фиг. 25) сигнал от последнего поступает на реверс привода 14. Штанга 17, перемещаясь в сторону магистрального пути 13, подводит толкатель 24 к вагонетке 10, и последний, взаимодействуя с ней, перемешает вагонетку на магистральный путь 13.
Когда вагонетка 10 окажется за упором на магистральном пути 13, флажок 76 взаимодействует с конечным выключателем 81, от которого поступает сигнал па реверс привода 14. Перемеш,аясь в сторону тележки, рычажок 30, взаимодействуя с упором 63 удерживаемым плечом 56 рычага 55, поворачивает толкатель 24 в положение, показанное на фиг. 26.
При достижении штангой 17 исходного положения (см. фиг. 12) флажок 76 взаимодействует с конечным выключателем 77 (см. фиг. 13), от которого поступает сигнал на выключение привода 14. В этом положении все
механизмы тележки находятся в исходном положении, и тележка подготовлена к выполпонию следующей програ.ммы.
Благодаря тому, что все элементы, управлиющие движением нгган 17 и 37 и толкателей 23 и 24, расположены симметрично продольной оси тележки, загрузка и выгрузка вагоиеток может производиться в обе стороны в одинаковых режимах.
Формула изобретения
1.Устройство для передачи вагонеток с одного магистрального рельсового пути на другой, параллельный первому, содержащее поперечные рельсовые пути и установленную на них траверсную тележку, снабженную отрезками рельсов для размещения вагонетки и
механизмом приема и выдачи вагонеток в виде выдвижной штанги с толкателем, отличающееся тем, что, с целью автоматизации процесса передачи вагонеток, тележка снабжена механизмом точной ее установки относительно магистральных путей, штанга снабжена вторым толкателем, попеременно работающим с первым, оба толкателя выполнены поворотными, а на тележке установлены приспособления для их поворота, причем оба
механизма снабжены общим приводом.
2.Устройство ло п. 1, отличающееся тем, что механизм точной установки тележки выполнен в виде смонтированного на выдвижной штанге ролика, взаимодействующего
с установленными между рельсами поперечных путей направляющими, образующими клиновидный паз.
3.Устройство по пп. 1 и 2, отличающееся тем, что привод механизмов тележки выполней в виде звездочки, одновременно взаимодействующей с цевочными рейками, смонтированными на выдвижных штангах обоих механизмов, причем зубья на одном участке звездочки и взаимодействующие с ними крайние цевки рейки механизма установки имеют уменьшенную ширину.
4.Устройство по п. 1, отличающееся тем, что приспособление для поворота толкателей выполнено в виде поворотных упоров и
двуплечих рычагов, установленных на тележке с возможностью взаи.модействия друг с другом, а также первых - с толкателями и вторых - с вагонеткой.
Источники информации, принятые во внимание при экспертизе
1. Электролафет грузоподъемностью 30 т. Проект № 2-1-00-00. Краматорский завод литья и поковок, 1969. 7Т11дЕМЕЩ:Г о7о1
©
О)
@ ®
r h-tCl L 27 33 yje/77
f-. I es / / / 72
,., S
2 f 7 f ff 31 Л/Г/I / y
S-ff
-Ф-е -ф-Ф -ф
/ 17 0 2 -- L/ff
78 79 80 8} 82
/fanpaSffewe dSif/fre/(/ff mej e/ffjfi/
,Sf
f 56 57 5927 . / 2360/S J7 17 I / I ffS I444./ W 2 e. 76 23
22 Фиг. 8
ffanflaS e/ff/e
УА ffffa/ e/ i wmff/ si/
f
/iej(aMi/3f o
33
Cfr76/ -oSffi/ 2
/
A 70
70
(PusJ
ipus.lO 2 rSJ |и„ ,fO 2V
.2ffgf
BO I
. ,bj-
ШМ
Сриг.22
2J
24
IPUi.
2J риг. 26W
/7
lpus.2t
УТ
l
m
г -Фиг. 23
:iX:
- 76
fff
T
%
Л J
-76ff 6-J 30
8f
Риг. 27


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для передачи вагонеток с одного магистрального рельсового пути на другой,параллельный первому | 1981 |
|
SU1013372A2 |
| Установка для съема кирпича с по-лОчНОй ВАгОНЕТКи и уКлАдКи ЕгО НАпЕчНую ВАгОНЕТКу | 1978 |
|
SU837887A1 |
| Устройство для установки рулонов по оси прокатного стана | 1978 |
|
SU764772A1 |
| Автоматическая линия для производства керамических изделий | 1986 |
|
SU1369898A1 |
| Установка для укладки керамических изделий на печную вагонетку | 1977 |
|
SU742145A1 |
| Поточная линия | 1975 |
|
SU590142A1 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ РУЛОНОВ НА БАРАБАН МОТАЛКИ | 1993 |
|
RU2093289C1 |
| Устройство для непрерывной намотки на катушку нитеобразных материалов | 1974 |
|
SU691225A2 |
| Тележечный конвейер для гибких автоматизированных систем | 1989 |
|
SU1694444A1 |
| Толкатель | 1985 |
|
SU1296816A1 |




iPua. 28 21 - 2ff L
Фиг. 29
ИИ
ЗЭ
-37
с -f
J
60
1
fff
ОУие.Л ffud /7
JJ
J /
22 JV
Lfe.J
