1
Изобретение относится к области дефектоскопии, например ультразвуковой, изделий круглого профиля и быть использовано лри контроле труб и прутков.
Известно устройство для загрузки и транспортировки цилиндрических изделий в зону контроля, содержаш,ее рольганг, ультразвуковой искатель с иммерсионной ванной, приводные транспортирующие ролики, устано:Вленные стационарно с одной стороны рольганга, и нажимные подпружиненные ролики с эксцентриковым приводом 1.
Недостатком устройства является необходимость переналадки его при переходе на контроль изделий другого диаметра. В устройстве предусмотрено только ручное отведение нажимных роликов в период загрузки.
Цель изобретения - автоматизация процесса транспортировки без переналадки для изделий различных диаметров.
Эта цель достигается тем, что устройство снабжено поворотными двуплечими рычагами, парами расположенными друг против друга с двух сторон продЪльной оси рольганга и укрепленными на неподвижных осях, на одном плече рычага установлен приводной транснортирующий ролик, а на втором, связанном с противостоящим рычагом пружиной, установлен нажимной ролик, при этом транспортирующие ролики противостоящих
рычагов кинематически связаны зубчатой передачей.
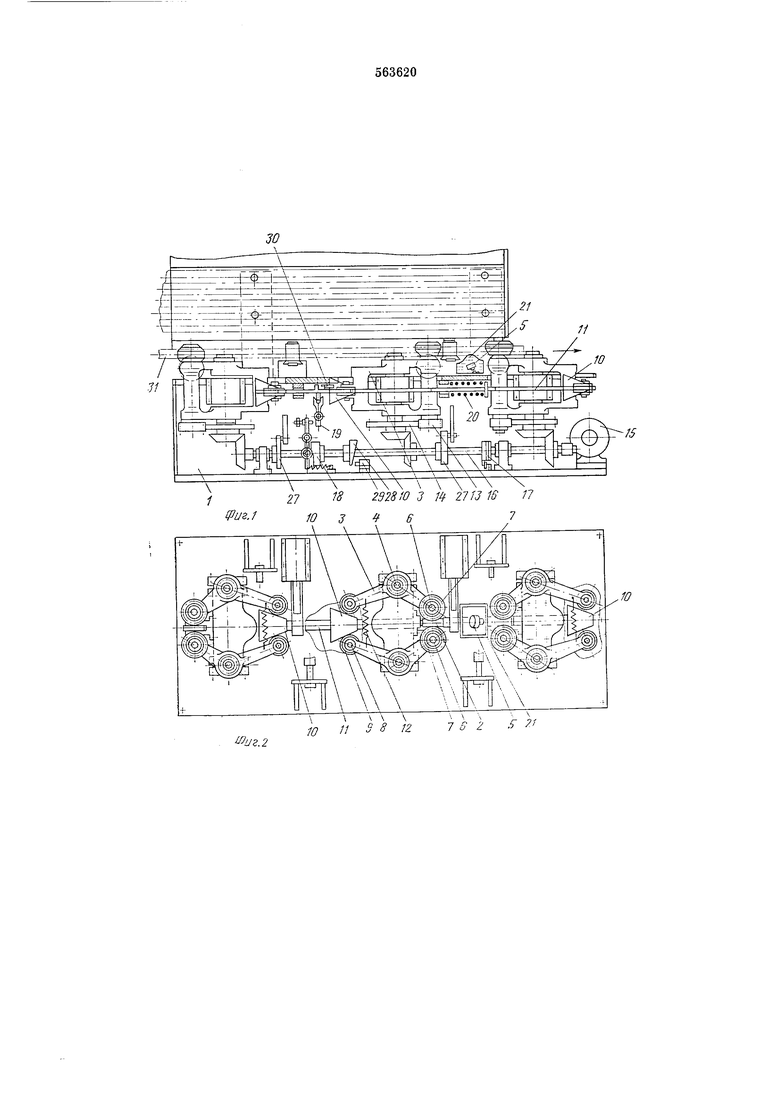
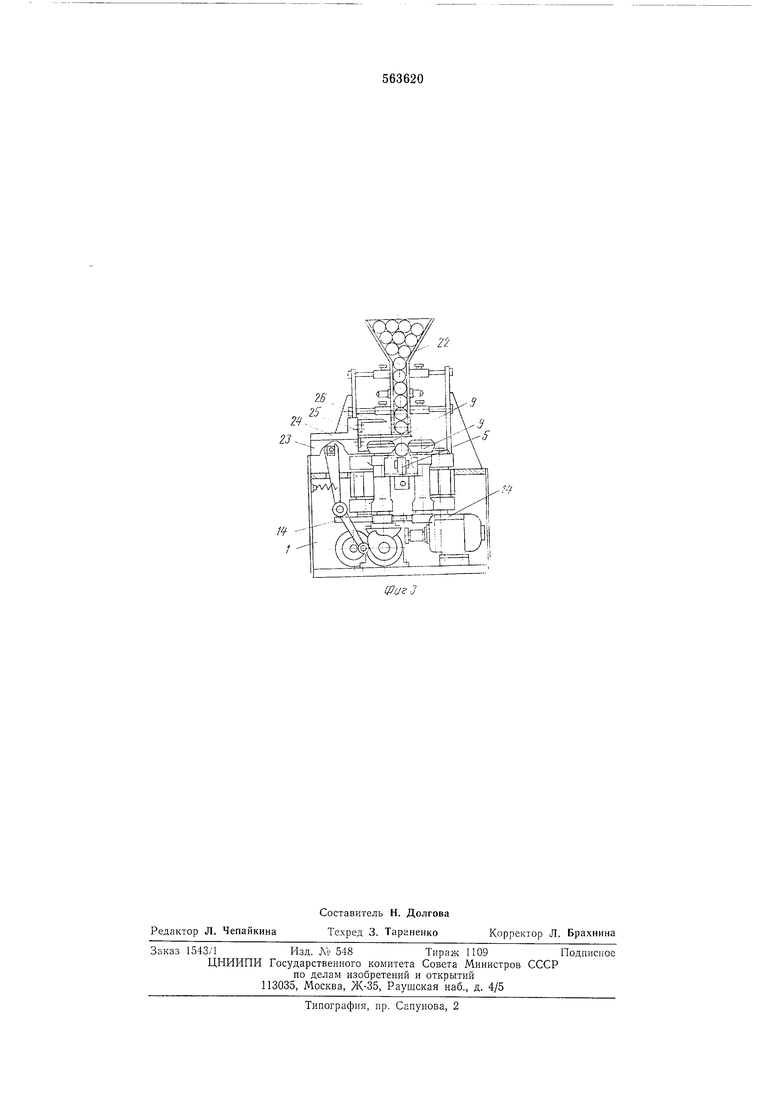
На фиг. 1 изображено предлагаемое устройство, общий вид; на фиг. 2 - то же, вид сверху; на фиг. 3 - то же, вид сбоку.
Устройство содержит станину 1, смонтированные на ней рольганг 2 и поворотные двуплечие рычаги 3 на осях 4, укрепленные попарно по обе стороны рольганга и центрирующие изделия относительно искателя о. На одном плече рычага на оси 6 жестко закреплен транспортирующий ролик 7, конусом обращенный к рольгангу, на втором плече на оси 8 закреплен наншмной ролик 9, контактирующий с разжимным конусом 10, жестко установленным на щтанге П. Плечи с нажимными роликами противостоящих рычагов связаны пружиной 12. На концах осей о установлены шестерни 13, находящиеся в зацеплеНИИ с зубчатым колесом 4, свободно вращающимся на оси 4 и кинематически связанным с приводом 15.
С приводом 15 кинематически связан и распределительный вал 16, на котором закреплены однооборотная муфта 17 и кулачок 18 для перемещения щтанги И усилием, которое передается ей через рычаги 19, а щтанга снабжена возвратной пружиной 20. Искатель помещен в иммерсионную ванну
21. Над рольгангом установлен питатель 22,
снабженный установленными в направляющие 23 и 24 шиберной заслонкой 25 и отсекателем 26 с приводом от кулачка 27. Для отключения однооборотной муфты 17 распределительный вал 16 снабжен кулач-ком 28 и контактирующим с ним концевым выключателем 29, а для включения муфты - конечным выключателем 30, контактирующим с рычагом 19.
Работает устройство следующим образом.
При запуске привода. 15 распределительный вал 16 повораичвается на один оборот. При этом кулачок 18 отводит через рычаги 19 штангу 11 с разжимным конусом 10 от нажимного ролижа 9. Пружина 12, сжимаясь, поворачивает рычаги 3 на осях 4 и разводит транспортирующие ролики 7 для приема изделия на рольганг 2. Шиберная заслонка 25 от кулачка 27 открывает искатель 22 и изделие 31 под собственным весом падает на рольганг. Поворачиваясь, кулачок 18 освобождает шта«гу 11 и под действием иружины 20, сжатой при разведении транспортирующих роликов 7, штанга перемещается и через разжимной конус 10 и нажимные ролики 9 поворачивает рычаги 3, которые и зажимают изделие 31. Транспортирующие ролики при этом центрируют изделие относительно искателя. Привод транспортирующих роликов во время загрузки не выключается. После выхода из последней пары транспортирующих роликов все пары их смыкаются, штанга 11 под действием пружины 20 перемещается до контакта с концевым выключателем 30, который включает л зфту 17, выключенную концевы.м выключателем 29 от кулачка 28 в момент зажима изделия траиспортирующими роликами, и цикл возобновляется.
Формула изобретения
Устройство для автоматической загрузки и транспортировки изделий к иммерсионной ванне ультразвукового дефектоскопа, содержащее рольганг, установленное над ним загрузочное устройство с рычажно-кулачковым
приводом, транспортирующие конусные ролики, нажимные ролики с разжимным конусом, закрепленным на подпружиненной штанге с рычажно-кулачковым приводом, отличающееся тем, что, с целью авто.матизации процесса транспортировки без переналадки для изделий различных диаметров, оно снабжено поворотными двуплечими рычагами, парами расположенными друг против друга с двух сторон продольной оси рольганга и укрепленными на неподвижных осях, на одном плече рычага установлен приводной транспортирующий ролик, а на втором, связанном с иротивостоящим рычагом пружиной, установлен нажимной ролик.
2. Устройство по п. I, отличающееся тем, что транспортирующие ролики противостоящих рычагов кинематически связаны зубчатой передачей.
Риг,10 // .2 2Э28Ю J т 27 fJ 1S
7 6 Z -Г У П
2 23
| название | год | авторы | номер документа |
|---|---|---|---|
| Установка для накопления кирпичей с зазором | 1986 |
|
SU1402432A2 |
| Реперфоратор | 1971 |
|
SU462302A1 |
| УСТРОЙСТВО ДЛЯ ОБАНДЕРОЛИВАНИЯ ШТУЧНЫХ ИЗДЕЛИЙ | 1971 |
|
SU302284A1 |
| Станок для шихтовки и сборки пакетов магнитопроводов статоров электрических машин | 1971 |
|
SU555512A1 |
| Манипулятор | 1979 |
|
SU844263A2 |
| Кромкогибочная установка | 1990 |
|
SU1784339A1 |
| Станок для закатки и отбортовки изделий | 1984 |
|
SU1250354A1 |
| ШЛЕППЕРНОЕ УСТРОЙСТВО | 1971 |
|
SU311675A1 |
| Установка для накопления кирпичей с зазором | 1985 |
|
SU1284836A1 |
| Поточная линия для сварки изделий в виде тел вращения | 1975 |
|
SU649531A1 |