Изобретеиие относится к машиностроению и мижс Сыть использовано в различных областях народного хозяйства для ав:оматизации производственных процессов.
По основному авт. св. № 655522 известен манипулятор, содержащий основание, на котором смонтировано плечо, кинематически связанное с механизмом его перемещений, и захватное устройство со своим механизмом перемещений, причем механизм перемещений передающего плеча выполнен в виде последовательно кинматически соединенных с двигателем ременной и зубчатой передач и смонтированных на общем валу эксцентрикового, кулачкового и гипоциклоидного механизмов, последний лз которых дополнительно кинематически соединен посредством сидяидпх на коромысле роликов кулачкового механизма с зксцентриковЫМ механизмом и снабжен смонтированной в плече с возможностью поступательно-возвратных относительно этого плеча перемещений и кинематически связанной с ним штангой, несущей смонтированный на ней ролик, а механизм перемещений захватного устройства выполнен в виде смонтированного на прикрепленной к передающему плечу олоре двуплечего подпруж.ииенного рычага, на одном конце которого прикреплено захватное устройство, а на другом - кулачок, 1взаимодействующ ий с роликом штаипи 1.
Недостатком известиого манипулятора является невозможность его остановки в
разных точках на заданное время, что снижает функциональные возможности манипулятора.
Цель изобретения - расширение функциональных возможностей манипулятора.
Цель достигается тем, что в кинематической цепи механизма перемещения плеча имеется червячная передача, на валу червяка которой установлена электроуправляемая однооборотная муфта с фиксатором, а на валу червячиого колеса - кулачок, причем вокруг этого вала расположены датчики.
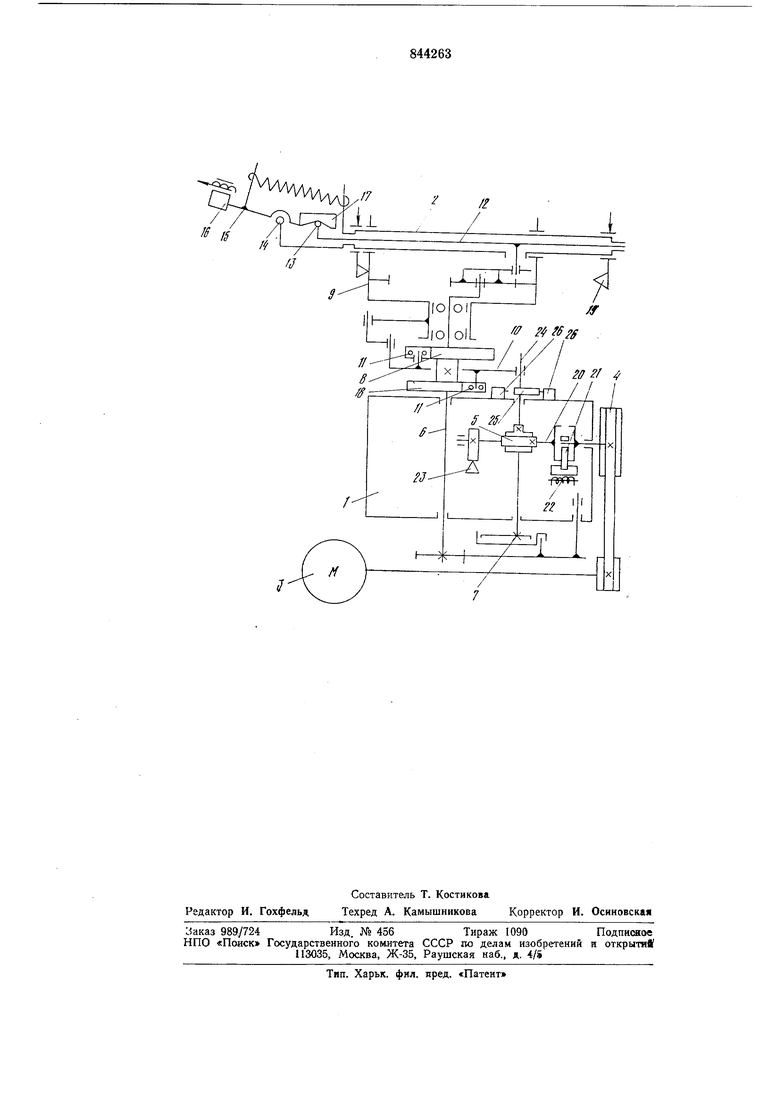
На чертеже представлена кинематическая схема предлагаемого манипулятора.
Манииулятор содержит основание /, на
котором смонтировано плечо 2 с механизмом его перемещений, включающим последовательно кинематически соединенные с двигателем 3 ременную 4 и червячную 5 передачи и смонтированные на общем валу 6 эксцентриковый 7, кулачковый 8 и гипоциклоидный 9 механизмы.
Гипоциклоидный механизм 9 дополнительно кинематически соединен посредством
смонтированных на коромысле 10 роликов
II кулачкового механизма 8 с эксцентриковым механизмом 7 и снабжен смонтированной в плече 2 с возможностью возвратно-поступательного относительно этого плеча перемещения и кинематически связанной с этим нлечом штангой 12. На штанге смонтирован ролик 13.
Механизм .перемещения захватного устройства выполнен в виде смонтированного и.а прикрепленной к передающему плечу 2 опоре 14 двуплечего подпружиненного рычага 15, на одном конце которого прикреплено захватное устройство 16, а на другом- кулачок 17, взаимодействующий с роликом 13 штапги 12.
Кулачковый механизм 8 содержит также кулачок 18.
Плечо 2 несет, кроме того, закрепленные на нем регулирующие перемещения этого плеча упоры 19, взаимодействующие с корпусом гипоциклоидного механизма 9.
На валу 20 червяка установлена электроуправляемая однооборотная муфта 21, пусковой электромагнит 22, который связан электрически с системой управления (не показана). Точная остановка вала 20 червяка обеспечивается фиксатором 23.
На 1валу24 4epiBH4Horo колеса закреплен кулачок 25, взаимодействующий с датчиками 26, расположенными вокруг вала 24 в требуемых точках остановки, сигнал с которых подается в систему управления манипулятором. Датчики обеспечивают включение и выключение муфты.
Манипулятор работает следующим образом.
От электродвигателя 3 через ременную передачу 4, червячную передачу 5 и эксцентриковый механизм 7 происходит поворот общего вала 6 относительно его вертикалькой геометрической оси на заданный угол. При повороте общего вала 6 на заданный угол и кулачка 18 кулачкового механизма 8 происходит последовательно поворот и возвратно-поступательное перемещение плеча 2, несущего щтангу J2.
После остановки плеча 2 и при продолжении работы гипоциклоидного механизма 9 происходит поступательное перемещение штанги /2 относительно плеча.
При вьгдвил ении штанги 12, несущей ролик 13, происходит поворот, кулачка 17, и, следовательно, захватного устройства 16 на заданный угол, определяемый профилем кулачка и положением упора 19.
При необходимости точной остановки манипулятора в разных точках подается сигнал выключения на электромагнит 22 однооборотной муфты 21.
При этом точная остановка обеспечивается фиксатором ,23, а точки остановки задаются положениями датчиков 26, на которые воздействует кулачок 25.
Продолжение работы обеспечивается сигналом в1КлючеЕи,я.
Формула изобретения
Манипулятор по авт. св. № 655522, О тл и чающийся тем, что, с целью расширения его функциональных возможностей, в кинематичесЕ ую цепь механизма перемещения плеча включена червячная передача, на валу червяка которой установлена электроуправляемая однооборотная муфта с фиксатором, 3 на валу червячного колеса - кулачок, причем вокруг этого вала расположены датчики.
Источник информации, принятый во внимание при экспертизе:
1. Авторское свидетельство СССР № 655522, кл. В 25 J 13/00, 1977.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1978 |
|
SU727423A2 |
| Манипулятор | 1977 |
|
SU655522A1 |
| Манипулятор | 1988 |
|
SU1521577A1 |
| Намоточная головка | 1984 |
|
SU1277229A1 |
| Ленточно-шлифовальный станок | 1978 |
|
SU766837A1 |
| Механизм розыска "раза" к ткацкому станку | 1987 |
|
SU1509438A1 |
| Устройство для сборки керамических пластинчатых конденсаторов с однонаправленными выводами | 1989 |
|
SU1653015A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ ТИПА ЧЕРВЯЧНЫЙ ХОМУТ И ПОЛУАВТОМАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2445180C1 |
| ШАРНИР С РЕГУЛИРУЕМОЙ ЖЕСТКОСТЬЮ | 2023 |
|
RU2823265C1 |
| Стан для прокатки изделий типа тел вращения | 1978 |
|
SU770634A1 |