(54) УСТРОЙСТВО УПРАВЛЕНИЯ КЛЕТИ КВАРТО ГИДРОИЗГИБОМ РАБОЧИХ ВАЛКОВ
как следствие, повышение качества прокатываемой полосы по геометрическим размьрам.
Для этой цели предлагаемое устройство дополнительно содержит два запатчика и два сумматора, причем вход первого задатчика соединен с первым сумматором, второй вход которого соединен с выходом усилителя небаланса, выход первого сумма тора связан с первым электрогидропреобразователем, выход второго задатчика соединен со вторым сумматором, второй вход которого связан с выходом усилителя небаланса, выход второго сумматора соединен со вторым электрогидропреобрааователем,
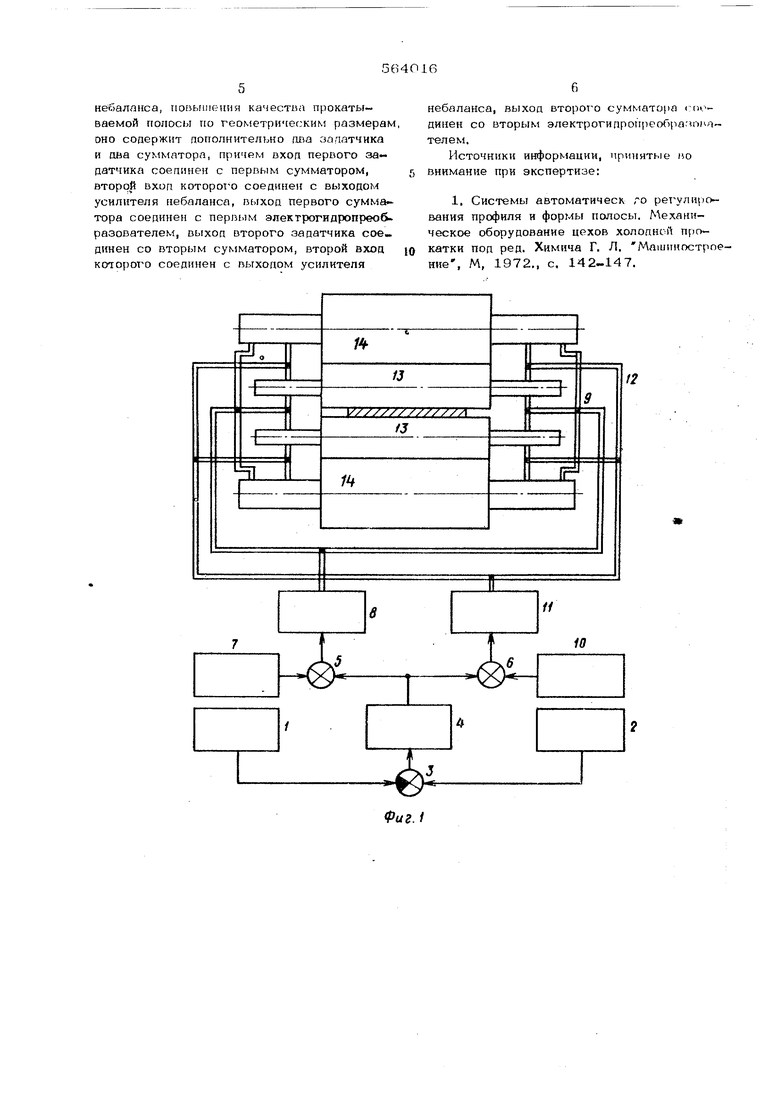
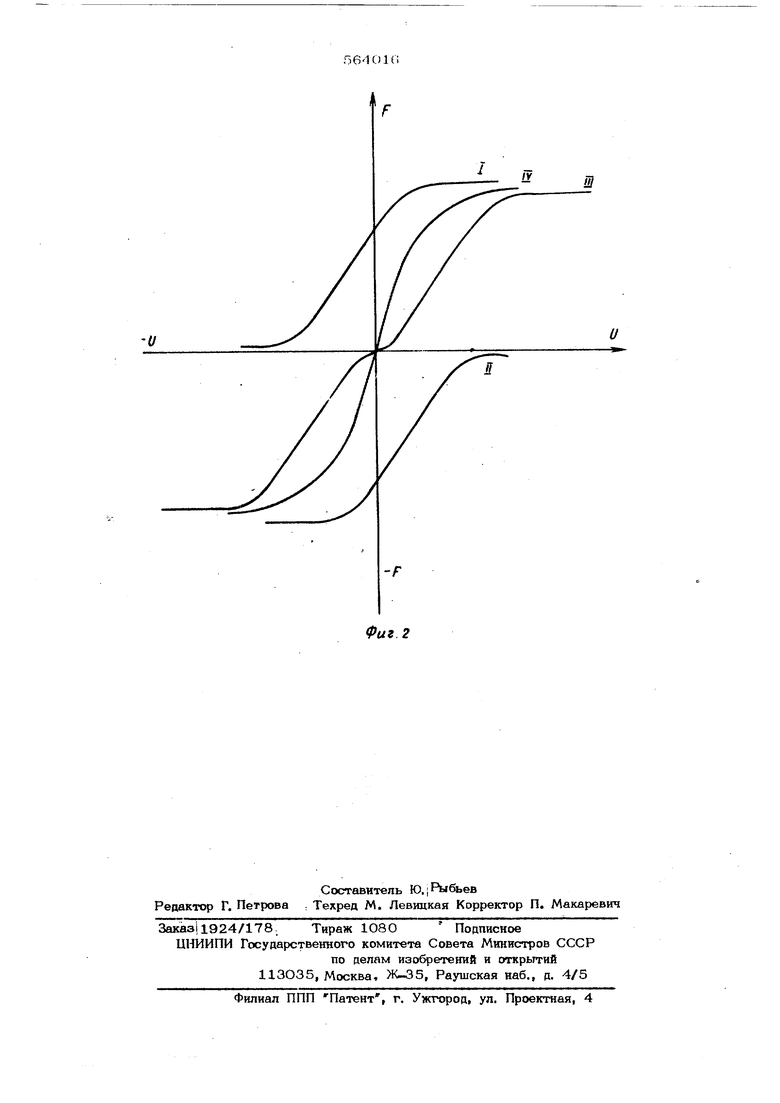
На фиг, 1 изображена блок-схема пред. лагаемого устройства: на фиг. 2 - зависимости усилий в системах противоизгиба и дополнительного изгиба от сигнала усилителя небаланса..
Устройство В1а1ючает систему 1 контроля удельных натяжений, задатчик 2 профиля, вычитающий блок 3, усилитель 4 небаланса, первый сумматор 5, второй сумматор 6, первый задатчик 7, первый электрогидропреобразователь 8, систему 9 противоизгиба рабочих валков, второй задатчик 10, второй электрогидропреоб- разователь 11, систему 12 дополнительного изгиба рабочих валков, рабочие валки 13, опорные палки 14.
Кривая 1 - статическая характеристика вход-выход системы управления противоигтибом рабочих валков кривая II статическая характеристика вход-выход системы управления дополнительным изгибом рабочих валков5 кривая Щ - сумма ная статическая характеристика вход-вы ход в системе управления выбранного прототипа: кривая IV - суммарная статическая характеристика вход-выход предлагаемого устройства.
Устройство утфавления гидроизгибом рабочих валков клети кварто состоит из системы 1 контроля удельных натяжений и задатчика 2 профиля, выходы которых подключены через вычитающий блок 3 ко входу усилителя 4 небаланса, выход же усилителя 4 небаланса подключен к первым входам сумматоров 5, 6, выход аадатчика 7- подклкиен ко aropoNfy входу сумм тора -5, а выход его - к электрогидропреобразователю 8, выход же электрогидропреобразователя 8 подсоединен к системе 9 противоизгиба рабочих валков, кроме того, выхоц задатчика 1О подключен ко второму входу сумматора 6, выход же сут матора 6 через электрогидропреобразователь
11 подключен к системе 12 пополпите/Пгного изгиба рабочих лалков.
Работа.ycTpoiteTBa состоит в том, что при настройке клети, при отс тствии металnaf на вход1л электрогицропреобра.зовате- лей В и 11 подают сигналы от зацатчиков 7 и 10 через сумматоры 5 и О. Указанные сигналы имеют противопаггожную полярность, вследствие чего на выходе
электрогидропреобразователя 8 устанавливается определенное давление м системе 9 противоизгиба иабочих валков, а па входе электрогидрогфеобразователя 11 уста- нагзливается такое же по величине павление в системе 12 дополнительяото изгиба D результате к шейкам рабочих валков 13 приложены усилия противоположного направления, которые взаимно- уравновешиваются и не приводят к изгибу валковой системы.
В процессе прокатки сигналы, снимаеNibie с системы 1 контроля удельных натяжений и с задатчика 2 профиля, подают в вычитающий блок 3. Выходной сигнал вычитающего блока 3 через усилитель 4 небаланса подают на входы сумматоров 5 и 6, где его суммируют с сигналами задатчиков 7 и Ю соответственно. Вследствие различной полярности сигналов задатчиков 7 и 10 выходные сигналы сумматоров 5 и 6, поступающих на входы электрогидропреобразователей 8 и 11, изменяются в противоположных направлениях пропорциоg нально сигналу на входе усилителя 4 небаланса. В результате в системах 9 про- тивоизгиба и дополнительного изгиба 12 устанавлива$отся различные давления.
Их разность, пропорциональная сигналу
0 -на входе усилителя 4 небаланса, в 5гзывает изгиб рабочих валков 13,
Формула изобретения
Устройство управления гидроизгибом рабочих валков клети кёарто, оборудованной системой контроля удельных натяжений, задатчиком профиля, вычитающим бло
ком, усилителем небаланса, двумя электрогндропрербразователями, отличающееся тем, что, с целью повыйЪнчя коэффициента усиления системы управления гидроизгибом рабочих валков, устранения нелинейных искажений характеристики вход-выход системы, а также улучшения динамических свойств устранением временного запаздывания реакции устройства управления гидроизгибом на подачу
управляющего сигнала на вход усилителя
5
нейала1 са, повышения качества прокатываемой полосы по геометрическим размерам оно содержит пополнительно два задатчнка и ова сумматора, причем вход первого за- датчика соединен с первым сумматором, второй вход которого соединен с выходом усилителя Е1ебаланса, м,1ход первого сумма тора соединен с первым электрогидропреобразователем, выход второго задатчика сое« динен со вторым сумматором, второй вход которого соединен с выходом усилителя
6
небаланса, выход второго сумматора сс-идинен со вторым электрогидропреобра.чомателам.
Источники информации, принятые по внимание при экспертизе:
1, Системы автоматическ го регулирования профиля и формы полосы. Механическое оборудование цехов холодной прокатки под ред. Химича Г. Л. Машиностроение, М, 1972., с. 142-147.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство регулирования формыпОлОСы HA МНОгОКлЕТЕВыХ CTAHAX | 1979 |
|
SU829234A1 |
| Устройство для автоматического регулирования формы полосы на прокатном стане | 1982 |
|
SU1031546A1 |
| Устройство для автоматического регулирования формы полосы на стане | 1982 |
|
SU1053918A1 |
| Устройство стабилизации профиля полосы | 1975 |
|
SU582859A1 |
| Устройство регулирования профиляВАлКОВ | 1979 |
|
SU844090A1 |
| Устройство для регулирования профиля и формы полосы на стане кварто | 1990 |
|
SU1729642A1 |
| Устройство для регулирования профиля рабочих валков стана кварто | 1982 |
|
SU1065053A1 |
| Система регулирования профиля валков | 1980 |
|
SU899181A1 |
| Устройство для автоматического центрирования полосы при прокатке | 1980 |
|
SU908450A1 |
| Устройство регулирования ширины горячекатанных полос на непрерывном стане | 1981 |
|
SU995945A1 |
14
15
12
/J
3je
Фиг 2
