1
Иаобретенне относится к контролирую щим устройствам прокатных станов.
Изобретение может быть использовано, например, в устройствах, зопровонсдення рулонов проката при прохождении ими тех- вологического участка моталки - отводящий конвейер - весы.
Известно устройство для сопровождения взпелий, например горячего тфоката, используюшее вычислительные машины l.
Устройство содержит фотоэлектрически датчики наличия горячекатанного металла, связанные с вычислительной машиной и установленные вдоль прокатного стана, ко торые контролируют прохождение проката через определенные участки технологичео кой линии. При этом в вычислительной ма. шине содержится регистрирующее устройство и/или световое табло. При прохожде«. НИИ через контролируемый участок наперед заданного количества полос осуществляет ся программная перестройка механизмов стана, с выдачей результатов на регистри. рующее устройство и/или световое табло.
Однако в таких устройствах слежение ведется только с цепью разделевня готовы изделий на партии причем в каждой партии набирается заданное количество еднниц, а задача слежения вводится в виде nporpaMfvibi в вычислительную машину,
Наиболее близким к предлагаемому изобретению по технической сущности н достигаемому результату является локаль ное устройство сопровождения полос либо отдельных дефектных частей no)ioc, еодержап1ее фотоэлектрические, контактные ss другие типы датчиков движен 5я полосы, связанные с запоминающими устройствами регистрирующим устройством и .устройством ввода - вывода информации 2|.
Однако такое устройство (система) осуществляет сопровождение объекта не до конца тещюлогического участка, а лишь до определенной точки, где провсходит либо разделение одного потока на несколь ко (сброс листов, вырезка дефектной ча рти полосы), либо изменение режимов про |с&тки (например, при прохождении сварно™
го шва на станах холодной прокатки) и т. д. При этом порядок следования объектов в потоке не меняется и, слеаовательно, не изменяется порядок передачи информации ofобъекте. Таким образом, известное устройство ие решает задачу сопровождения обьектов в потоке, где порядок следования каждого из обьектов изменяется и не решает задачу выдачи информации об этом обьекте в конечной точке технологического участка.
Целью изобретения является обеспечение контроля движения обьектов с изменяющимся порядком следования их а потоке и выдача информации о каждом из них в конечной точке технологического участка
Указанная цель достигается тем, что в предлагаемое устройство дополнительно введены блок контроля технологического оборудования, блок буферной памяти и блок заголовка, причем второй и третий выходы блока ввода-вывода подключены соответственно ко входам блока заготовок и первого блрка промежуточной памяти, при этом выходы последних соединены с соот ветствующими входами блока ввода-вывода, а выход датчика движения подключен ко второму Входу первого блока промежуточной памяти, а к другим входам послед,них подключены соответствующие выходы блока буферной памяти и блока контроля технологического оборудования, причем входы после взаимосвязаны. Указанная цель достигается также и тем, что общее
CV
число блоков промежуточной памяти определяется числом одновременно контролируемых потоков рулонов, объединяющихся затем в один поток,
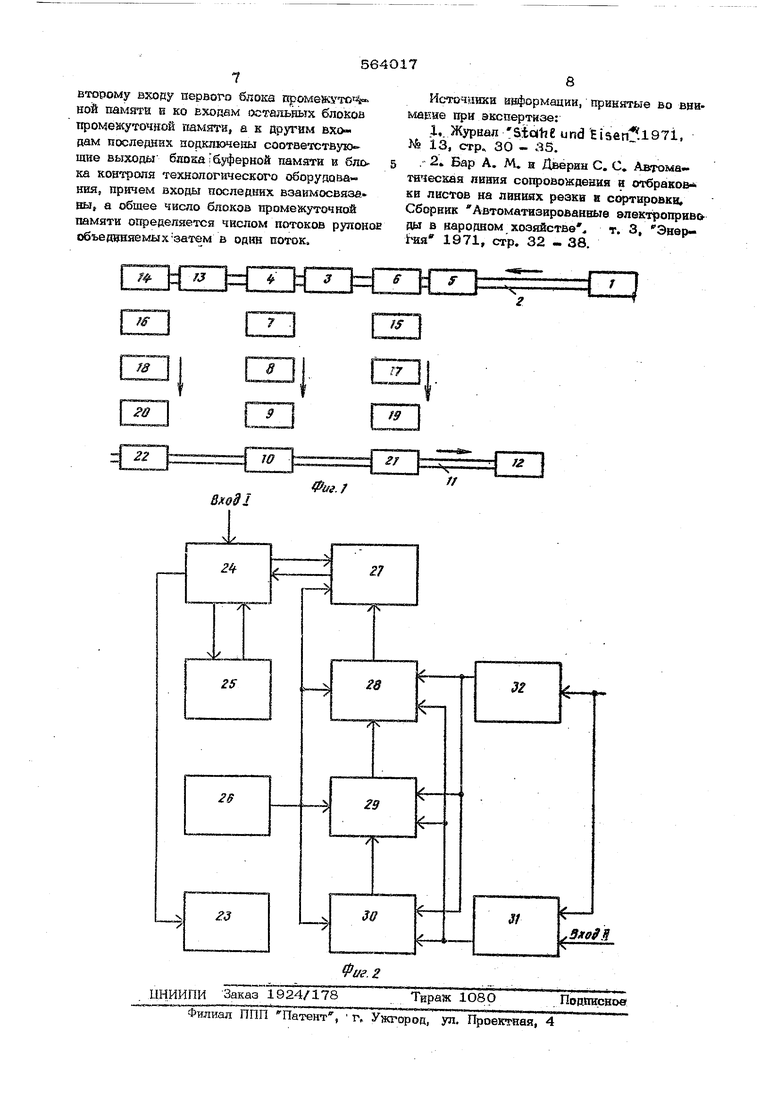
На фиг. 1 показан технологический участок от посяедней клети до весов: на фиг. 2 - блок-схема предложенного уст ройства для сопровождения рулонов.
Устройство содержит: последнюю клеть 1 чистовой группы стана, отводшияй ролыганг 2, тянущие ролики 3, моталку 4, тянущие ролики 5, моталку 6, с1ьемник 7 рулонов, кантователь S рулонов, передаточную тележку 9, приемник 1О рулонов, конвейер,-Ц, весы 12, тянущие ролики 13, моталку 14, съемники рулонов, 15,16, кантователи 17, 18 рулонов, передаточные тележки 19,20, приемники рулонов 21,22 регистрирующее устройство 23, блок 24 ввода-вывода, блок заголовка 25, датчик 26 движения конвейера, блоки 27-30 промежуточной памяти, блок 31 буферной памяти, блок 32 контроля вспомогательных механизмов стана.
Полоса при выходе из последней клети 1 чистовой группы стана транспортируется
рольгангом 2, затем и она захватывается например, тянущими роликами 3 и сзаправ- ляется в барабан моталки 4, при этом тянущие ролики 5 предыдущей моталки 6 находятся в разведенном состоянии, Моталка 4 сматывает полосу в рулон, затем рулон после остановки моталки 4 снимается посредством съемника 7, который надевает рулон на крюк кантователя 8. Кантователь В, поворачиваясь, устанавливает рулон на платформу передаточной тележки 9, которая перемещается к приемнику Ю рулонов на конвейере 11. Приемником Ю рулон устанавливается на-конвейер 11 и последним транспортируется на весы 12.
После смотки одной полосы через некоторый интервал времени поступает новая полоса, например, в моталку 6, после смотки которой вновь образованный рулон посредством механизмрв 15, 17, 19, 21 также транспортируется к конвейеру 11. Поскольку скорость конвейера 11 мала по сравнению со скоростью прокатки и при условии, что время транспортировки рулона от моталки до конвейера одинаково для всех моталок, то второй рулон окажет ся установленным перед первым, т.е. второй рулон первым поступит на весы.
Устройство служит для сопровождения рулонов, начиная с момента заправки полосы в моталку и кончая выходом рулона на весы с выдачей информации о каждом из них в порядке их поступления.
Вход регистрирующего устройства 23 подключен к выходу блока 24 ввода-вывода, связанного, в свою очередь, с блоком 25 заголовка. Выход датчика 26 движения конвейера связан со входами блоков 27 - 30 промежуточной памяти, причем блок 27 связан с блоком 24 ввода-вывода, а выход блока ЗО последовател1зно связан с третьим входом блока 27 через блоки 29 и 28 промежуточной памяти. Пра этом выход блока 31 буферной памяти связан с третьими входами блоков ЗО, 29 и 28, а выход блока 32 с четвертыми входами последних
На один из входов блока 31 и 32 аз внешних устройств подается сигнал Конец полосы , на другой вход 31 поступает информация, характеризующая каждый рулон в отдельности, например, его теоретический вес (произведение номинальных размеров полосы на расчетный вес. 1 пог. м), толщина полосы и т. д. На первый вход блока 24 ввода-1м и|ДгТ ИЗРНР поступает информация, характеризующая всю группу рулонов ( например, номер плавки, дата, номинальные ширина и толщинг
полосы и т. д), именуемая в дальнейшем заголовком, которая заносится в блок 25 заголовка. При поступлении сигнала Конец полосы на один из входов блока 32 н 31 информация о каждом рулоне, поступающая ка другой вход блока 31, запоминается в последнем. При соблюдении технологической последовательности работы вспмогательных механизмов на выходе блока 31, осуществляющего контроль за ними, появляется сигнал, поступающий на вход, например, блока 29 (если полоса поступает на моталку 14), При этом информация с выхода блока 32 переносится на соответствующий вход блока 29, а блок 31 устанавливается в ноль. При этом на третий вход блока 29 начнут поступать импульсы от датчика 26 движения конвейера через определенную величину Д В перемещения ленты конвейера. Если L - расстояние между соседними приемниками рулонов, то при перемещении ленты коввейера на это расстояние от датчика 26 в блок 29 поступит П импульсов, где Емкость каждого из блоков 28, 29, 30 выбрана в соответствии с максимальным числом рулонов, присутствующих одновременно на контролируемом промежутке.
Предположим, что после очередного сиг нала Конец полосы, поступивщего на вхогЫ блоков 31 и 32, следующая полоса после ее смотки в рулон с другЫ мотая ки была установлена впереди первой (пер вого рулона). Информация о руяоне с выхода блока 31 по команде блока 32 будет перенесена в блок 28. В результате импульсы от датчика 5б поступают теперь в блоки 28 и 29, т.е. информация о рулонах будет синхронно сдвигаться внутри блоков 28 I 29. При поступлении в блок 29 последнего П -го импульса информация о . рулоне ( а в порядке следования на конвейере-второй) с выхода блока 29 поступит на вход блока 28 и с этого момента внутри блока 28 будет храниться информация о двух рулонах. Но так как информация о втором рулоне ( а в порядке следования на конвейере последний оказался первым) в блок 28 была введена раньше, то она и появится на выходе блока 28 в первую очередь, откуда поступит в блок 27. С .этого момента на вхоц блока 27 «аЧНут поступать импульсы от датчика 26 и после поступления иьтпул1:сов на выходе блока 27 формируется команда - сигнал запуска блока 24 ншсда-вывода, п результате чего информация с выхода блока 27 поступает на соответствующий вход блока 24, одновременно пронгпюдотцего съем информации с ныхоцл блока 25, и на вход
регистрирующего устройства 2.4 с: соотг-с-ь ствующего выхода блока 24 по ;:туг аь)г оба вида информации. В послепуюиюм зпголовок не печатается до поступлення а блок 25 с выхода блока 2-i соответстнующей команды.
После опроса блок 24 «новь ожица поступления запускающей . с иыхода блока 27, Ввиду того, что час гота поступления импульсов от датчика 20 nft/iCiлика и определяется скоростью двнжеиня конвейера, а быстродействие регистрирующего устройства 23 большое, то наложенш:на один вход во времени поступления команды запуска блока 24 н процесса регистраини исключается.
После поступления п импульсов от датчика 26 в блок 28 с прохождения первого рулона по конвейеру, информация о первом рулоне поступает в блок 27, где вновь производится отсчет импульсов от датчика 26. Затем на выходе блока 28 вновь формируется команда запуска блока 24, вновь блок 24 произведет съем информации о рулоне с блока 27 с выдачей ее на регистрирующее устройство 23 и т.д.
Из приведенного примера видно, что информаиня о втором рулоне, вышедшем первого, зарегистрирована перед информацией о первом рулоне,
При поступлении полосы на моталку 14 информация о ней будет последовательно передаваться из блока 31 в блок ЗО, а с его выхода «а вход блока 23 и т. д. аналогично ранее описанному.
Формула изобретения
I
Устройство для сопровождения рулонов, содержащее датчик движения конвейера, блоки промежуточной памяти, соединенные последовательно, блок ввода-вывода И1ф)рмации, один выход которого подключен ко входу регистрирующего устройства, отличающееся тем, что, с целью обеспечения контроля движения рулонов с изменяющимся порядком следования их в общем потоке и выдачи информации о каждом из них в конечной точке технологического участка, в него дополнительно введены блок контроля технологического оборудования, блок буферной памяти и блок заголовка, причем второй и третий выходы блока ввода-вывода подключены соотве-гственно ко входам блока заголовка и первого блока промежуточной памяти, при этом выходы последних подключены к соответствующим входам блока ввода-вывода, л выход датчика дпижения подключен ко
второму входу первого блока г омекйгто ной памяти в ко входам остальных блоков промежуточйой памяти, а к йругам входам последних подключены соответствую щие выходы бяогабуферной памзири к блока контроля технологического оборудования, причем входы последних BsaKuocBstaaвы, а обшее число блоков промежуточной памяти определяется Числом потоков руноное объедшаяемыхзатем в од№ поток.
Источники информации, принятые во внамаьше при экспертизе:
Д.,. Журнал Sioitjг und Eisen 197i, J 13, стр. 30 - 3S.
. 2 Бар А. М. н Дверин С. С. Автоматическая лишя сопровождения и от6ракоа- KB листов на линиях резкв в сортировки. Сборник Автоматизированные электропривот в народном хозяйстве т. 3, Энерi-Ha 1971, стр. 32 - 38.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для передачи информации при учете перемещающихся изделий | 1981 |
|
SU942114A1 |
| Устройство для передачи информации при учете перемещающихся изделий | 1982 |
|
SU1068957A2 |
| Устройство для передачи информации при учете перемещающихся изделий | 1976 |
|
SU616647A1 |
| Устройство для автоматического сопровождения сварных швов и останова реверсивного прокатного стана | 1977 |
|
SU743739A1 |
| Система автоматического регулирования толщины полосы на реверсивном прокатном стане | 1989 |
|
SU1650300A1 |
| Устройство для передачи информации при учете перемещающихся изделий | 1979 |
|
SU868813A2 |
| Устройство для подсчета перемещающихся изделий | 1983 |
|
SU1121687A2 |
| Линия продольной резки | 1988 |
|
SU1613215A1 |
| Система выбора моталок и управления уборочным конвейером | 1987 |
|
SU1532108A1 |
| Устройство регулирования натяжения полосы в станах холодной прокатки | 1984 |
|
SU1227278A1 |
