(54) ШАГОВЫЙ КОНВЕЙЕР
| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый конвейер | 1980 |
|
SU933571A1 |
| АВТОМАТИЗИРОВАННАЯ ТРАНСПОРТНО-СКЛАДСКАЯ СИСТЕМА ДЛЯ КОЛЕСНЫХ ШИН | 1990 |
|
RU2013327C1 |
| ЛИНИЯ ДЛЯ ВЫРАБОТКИ ХЛЕБОБУЛОЧНЫХ ИЗДЕЛИЙ НА ЛИСТАХ | 1971 |
|
SU424550A1 |
| Шаговый конвейер | 1990 |
|
SU1787881A1 |
| Транспортирующее устройство | 1979 |
|
SU876515A1 |
| Шаговый конвейер | 1978 |
|
SU781136A1 |
| Шаговый конвейер-накопитель | 1979 |
|
SU859259A1 |
| Шагающий конвейер | 1982 |
|
SU1022894A1 |
| Шаговый конвейер | 1982 |
|
SU1082712A1 |
| Шаговый конвейер | 1978 |
|
SU722815A1 |
Изобретение относится к транспортным средствам, а именно к средствам для транс портирования деталей типа коробов и балок.
Известен шаговый конвейер, включающий две грузонесущие рамы, совершающие качательные движения в вертикальном и горизонтальном направлениях, в привод их пер&-, мещения. Конвейер, кроме того, снабжен подъемно-опускным механизмом в виде поворотных двуплечих рычагов, снабженных катками, на которые опираются рамы, а также механизмом возвратно-поступательного дви жения в акр.е бесконечной тяговой депи, каждая ветвь этой депи связана с одной рй мой ij . Подъемно-опускной механизм связан с :приводом. конвейера. Такой конвейер неудобен тек, что нельзя загружать одновремеш:о несколько деталей, накапливать их независимо от расположения и расстояния между ними и выдавать их на рабочее место по одной с четко выдержанным шагом. Наличие шарнирно-рычажных соединений и передач усложняет конструкцию и снижает надежность работы конвейера,
Наиболее близким техническим решением к данному изобретению является устройств во, вкщочающее неподвижную и подвижную, соединенную с приводным механизмом рамы, имеющие гнезда для изделий. Приводной механизм состоит из силового цилиндра, на конце штока которого смонтированы ролики, перемешающиеся по вертикальным направляющим, жестко закрепленным на подвижной ме, установленной на колесах, передвигающихся по неподвижным копирам, имеющим по одному наклонному участку, над которым установлены стрелки, снабженные пружинами и выполненные в виде двуплечих угловых рычагов, направленных вершиной вверх 1.2J.
Недостатком известного устройства я&ляется то, что этот конвейер лишен возмо} ности загрузки одновременно несколькими деталями, их наполнения независимо от рас положения с четко выдержанным шагом.
Целью изобретения является обеспечение возможности загрузки конвейера одновременно несколькими деталями, их накопления независимо от расположения и расстояния
между ними и выдачи на рабочее место по одной с четко выдержанным шагом,
Эта цель достигается тем, что предлагаемый конвейер имеет зону накопления, размещенную перед зоной траиспортировки, между этими зонами установлен отсекатель, управляемый посредством двух нормально разомкнутых выключателей, расположенных в зоне накопления и транспортировки и вы- полненных в виде двуплечих рычагов, уст&новленных шарнирно своей серединой на не подвижной раме, причем верхние концы рычагов cooTBecTBeifflo размещены в зоне накопления ниже уровня подъема подвижной рамы, а в зоне транспортирования выше уровня подвижной рамы.
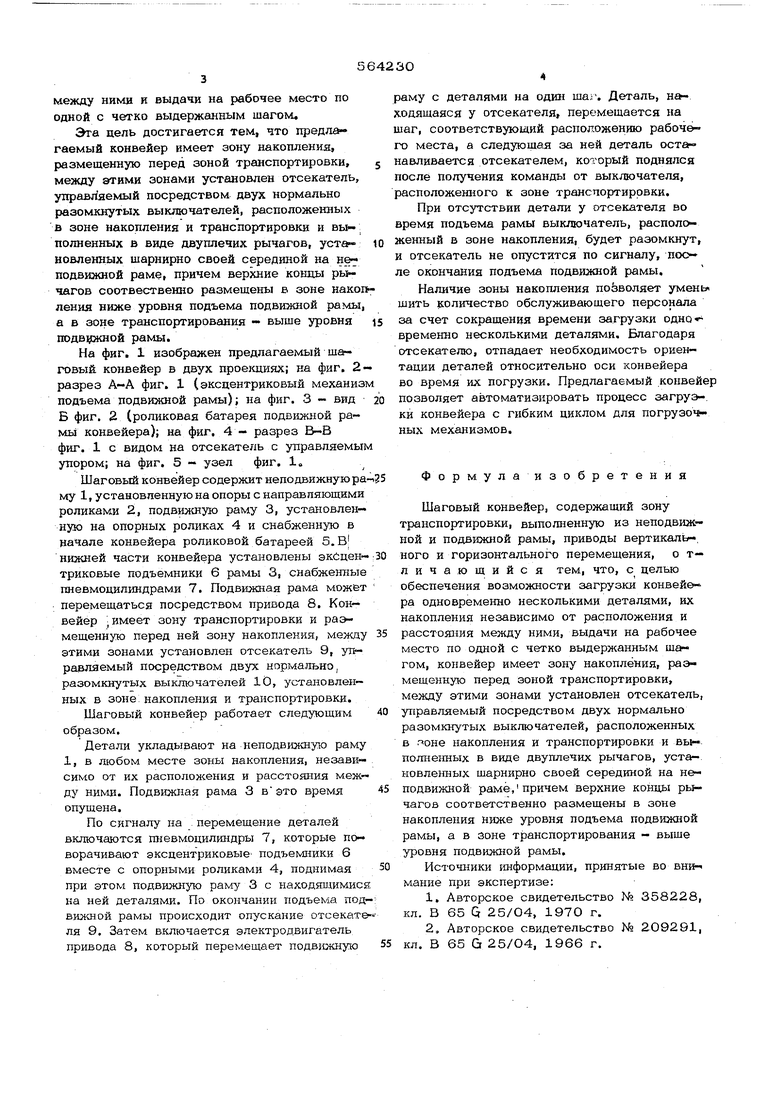
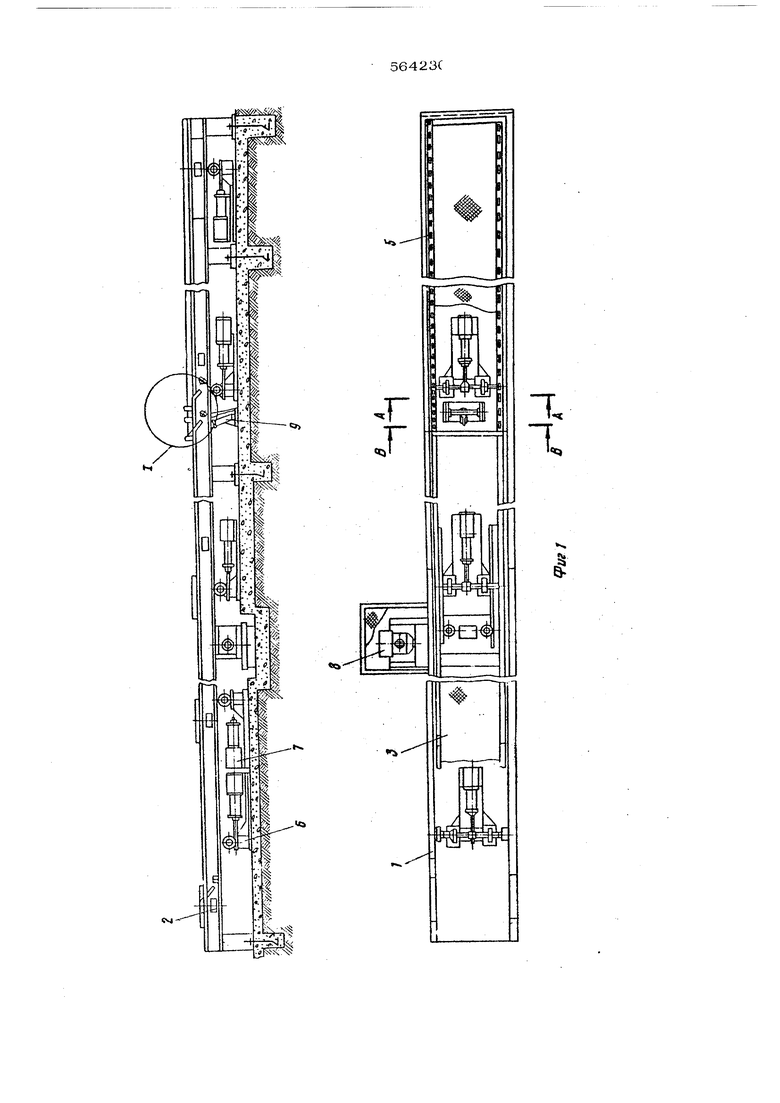
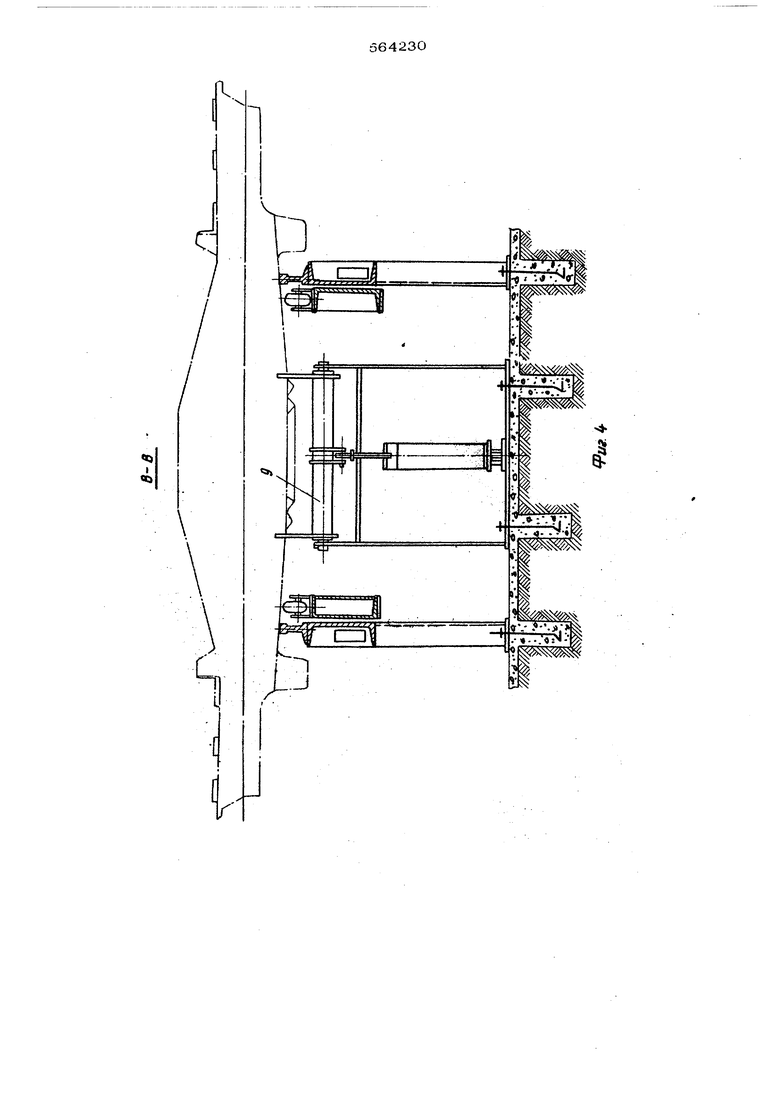
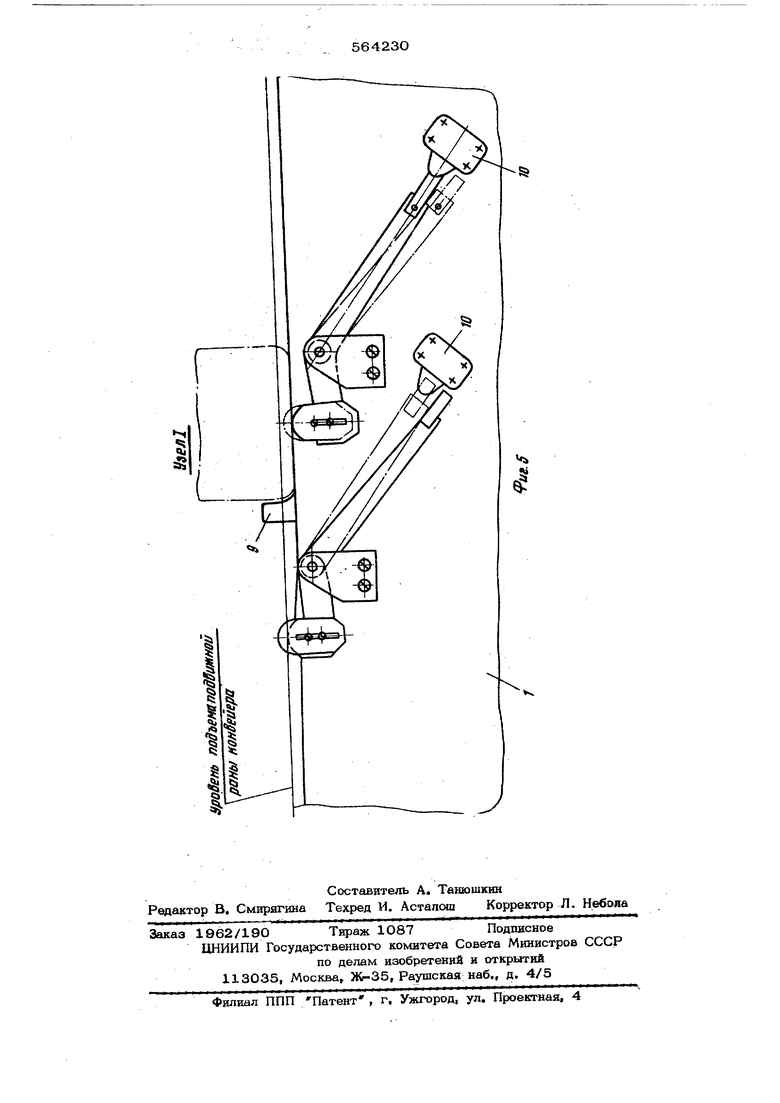
На фиг. 1 изображен предлагаемый шаговый конвейер в двух проекциях; на фиг. 2 - разрез А-А фиг. 1 (эксцентриковый механизм подъема подвижной рамы); на фиг. 3 - вид Б фиг. 2 (роликовая батарея подвижной рамы конвейера); на фиг, 4 - разрез В-В фиг. 1 с видом на отсекатель с управляемым упором; на фиг. 5 - узел фиг. 1«
Шаговый конвейер содержит неподвижнуюpa му 1, установленную на опоры с направляющими роликами 2, подвижную раму 3, установленную на опорных роликах 4 и снабженную в начале конвейера роликовой батареей 5. В нижней части конвейера установлены экСцентриковые подъемники 6 рамы 3, снабженные пневмоцилиндрами 7. Подвижная рама может перемещаться посредством привода 8. Конвейер Имеет зону транспортировки и ра&мещенную перед ней зону накопления, между этими зонами установлен отсекатепь 9, управляемый посредством двух нормально, разомкнутых выключателей 10, установленных в зоне накопления и транспортировки.
Шаговый конвейер работает следующим образом.
Детали укладывают на неподвилшую раму 1, в любом месте зоны накопления, незави- симо от их расположения и расстояния между ними. Подвижная рама 3 в это время опущена.
По сигналу на , перемещение деталей включаются пневмоцилнндры 7, которые поворачивают эксцентриковые подъемники 6 вместе с опорными роликами 4, поднимая при этом подвижную раму 3 с находящимисй на ней деталями. По окончании подъема под- вш4шой рамы происходит опускание отсекатэля 9. Затем включается электродвигатель привода 8, который перемещает подвижную
раму с деталями на один шаг . Деталь, находящаяся у отсекателЯ} перемещается на шаг, соответствующий расположению рабоч&го места, а следующая за ней деталь ост навливается отсекателем, который поднялся после получения команды от выключателя, расположенного к зоне транспортировки.
При отсутствии детали у отсекателя во время подъема рамы выключатель, расположенный в зоне накопления, будет разомкнут, и отсекатель не опустится по сигналу, после окончания подъема подвижной рамы.
Наличие зоны накопления позволяет умень шить количество обслуживающего персонала за счет сокращения времени загрузки одно временно несколькими деталями. Благодаря отсекателю, отпадает необходимость ориентации деталей относительно оси конвейера во время их погрузки. Предлагаемый конвейе позволяет автоматизировать процесс загруэки конвейера с гибким циклом для погрузо ных механизмов.
Формулаизобрет
е н и я
Шаговый конвейер, содержащий зону транспортировки, выполненную из неподвижной и подвижной рамы, приводы вертикаль-, ного и горизонтального перемещения, о т- личающийся тем, что, с целью обеспечения возможности загрузки конвейера одновременно несколькими деталями, их накопления независимо от расположения и расстояния между ними, выдачи на рабочее место по одной с четко выдержанным шагом, конвейер имеет зону накопления, размещенную перед зоной транспортировки, между этими зонами установлен отсекатель, управляемый посредством двух нормально разомкнутых выключателей, расположенных в .оне накопления и транспортировки и полнегшых в виде двуплечих рычагов, установленных шарнирно своей серединой на неподвижной раме,причем Верхние концы рычагов соответственно размещены в зоне накопления ниже уровня подъема подвиж11ой рамы, а в Зоне транспортирования - выше уровня подвижной рамы.
Источники информации, принятые во BHI мание при экспертизе:
VI
Т Т
t
v|%
4s;
.v
«и
«c
