(54) ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО
В П т Б
П 1Д uUMiiiu Si/g
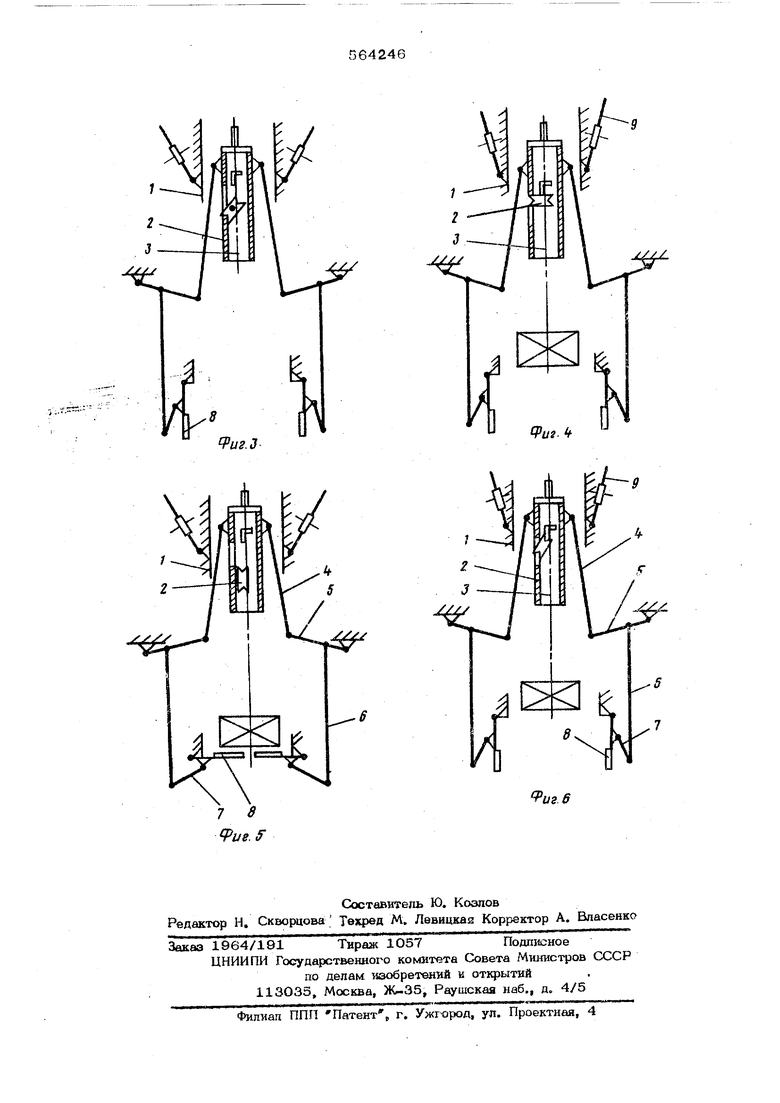
аубом удерживает корпус 1 в определенном попожешт относительно ползуна 3.
В таком положении аахват опускается над груоом. Когда органы 8 оказывают- ся ниже захватываемого груза (фиг, 4),
проксходит зависание корпуса 1 на штангах 9, которые, имея шарнирные сочленения собой и винты 10, занимают свое крайнее положение.
ГЪдъем захвата выполняется грузоподъемным механизмом (например элекароталью закрепленным неподвижно на несущей «балк KpaHaj к которой шарнирно крепятся штанги 9.
3 продолжает движение вниз,
при этом упор ползуна 3, взаимодействуя со звездочкой 2, поворачивает ее, а второе ллачо звездочки упирается в вырез ползуна, препятствуя дальнейшему его опусканию. После зависания захвата на необходимой высоте начинается его подъем (фиг. 5)
Ползун 3, поднимаясь черей рычаги 4,5 6 и звено 7, поднимает органы 8 под грузом в горизонтальное положение до упора их в корпус 1, а вырез ползуна поворачи- вает звездочку 2 в вертикальное попоже ние. Происходит подъем и транспортирование груза захватом. При опускании груза на роверхвость (фиг, б) корпус 1 зависает на biTanrax 9, ползун 3, продолжая опускаться, через рычаги 4,5,6 и звено 7 опускает грузонесуише элементы 8 в вертикальное положение, а упор ползуна 3, поворачивая звездочку 2, вводит зуб звездочки в вырез ползуна. При последующем подъеме захвата звездочка 2 своим зубом удерживает корпус 1 в определенном положении относительно ползуна 3. Происходит фиксация под грузом органов 8 в опушенном вертикальном положении и подъем захвата над грузом.
, Автоматический захват позволяет осушествлять дистанционно захват-., например обрезиненных дорнов без ручной строповки и воздействия веса корпуса этого устройства на груз в момент захватывания,, исключает взаимное перемещение обрези- ненных дорнов в момент их захватывания, которое неизбежно происходит при транспортировании мягкими стропами, что очень важно для некот ч)ых видов изделий, не допускающих деформации сырого резинового слоя, наложеннмх) на дорн.
Формула изобретения
Грузозахватное устройство, содержащее корпус с .шарнирно установленными на нем рычажными грузозахватными органами, связаннъ1ми с закрепленным на корпусе с четырехтактным механизмом фиксации их в открытом положении, состоящим из стойки, ползуна и взаимодействующей с ними звездочки, отличаю-шееся «.тем, что, с целью захвата груза на заданной высоте без опирания устройства на повер:&ность груза или основание, на котором он расположен, корпус подвешен на шарнирносочлененных тягах, концы которых соединены с грузоподъемным механизмом, причем тяги снабжены регулируемыми упорами.
Источники информации, принятые во внимание при экспертизе :
1.Меламед С. М. Автоматические зах ваты для штучных грузов , М., 1965,
с. 123, рис.76а.
2.Меламед С, М. Автоматические захваты для штучных грузов., М., 1965,
с. 71. рис. 44, :
3.Авторское свидетельство СССР
№ 237366, кл. В 66 С 1/56, 1966 г.
иг.
Риг.2
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1984 |
|
SU1196329A1 |
| АВТОЗАХВАТ ДЛЯ ТРАНСПОРТИРОВКИ МЕЛКОШТУЧНЫХ БЕТОННЫХ ИЗДЕЛИЙ | 2007 |
|
RU2337052C1 |
| МЕХАНИЗМ ФИКСАЦИИ ГРУЗОЗАХВАТНОГО УСТРОЙСТВА | 1992 |
|
RU2035380C1 |
| Автоматический захват инженера И.В.Илыка | 1979 |
|
SU908733A1 |
| СПОСОБ ЗАГРУЗКИ ОБЛУЧЕННЫХ БЛОКОВ ДАВ-90 И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2510086C2 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2006 |
|
RU2306253C1 |
| Грузозахватное устройство | 1990 |
|
SU1736904A1 |
| Грузозахватное устройство | 1973 |
|
SU580174A1 |
| Механизм фиксации для грузозах-ВАТНОгО уСТРОйСТВА | 1967 |
|
SU812687A1 |
| Грузозахватное устройство | 1990 |
|
SU1759775A1 |