1
Изобретение относится к области подъема, транспортировки и укладки груза и может использоваться для перегрузки штучных грузов,например, железнодорожных звеньев.
Известен механизм фиксации для грузозахватного устройства, содержащий раму с шарнирно закрепленными рычагами, корпус с упором, жестко закрепленный на раме, и ползун, расположенный в корпусе, снабженный поворотным фиксатором, взаимодействующим с упором корпуса 1.
Однако в данном устройстве механизм фиксации воспринимает нагрузку от веса захвата и поднимаемого груз что приводит к быстрому износу механизма фиксации.
Цель изобретения - разгрузка механизма фиксации от веса рамы и поднимаемого груза.
Для достижения этой цели в механизме фиксации для грузозахватного устройства, содержащем раму с щарнино закрепленными рь1чагами,корпус с упором, жестко закрепленный на раме, и ползун, расположенный в корпусе, снабженный поворотным фиксатором, взаимодействующим с упором корпуса, поворотный фиксатор
выполнен с выступами, взаимодействующими с рычагами, а ползун - с верхним и нижним опорными буртами, контактирующими с корпусом.
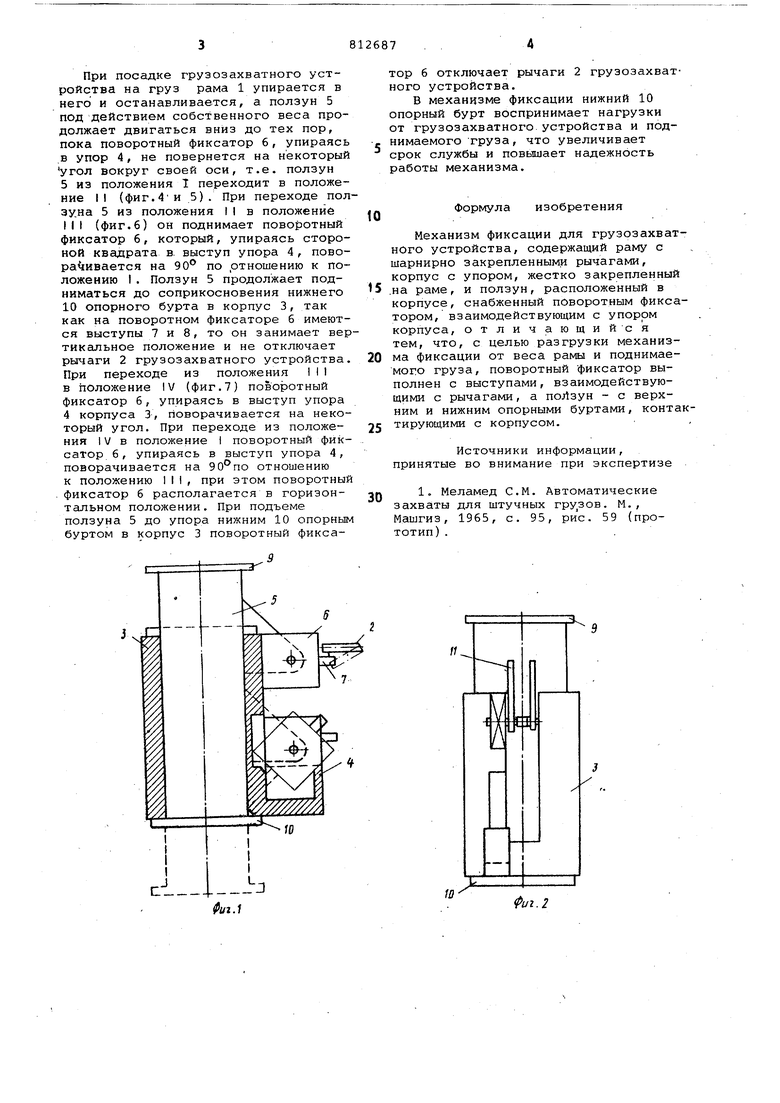
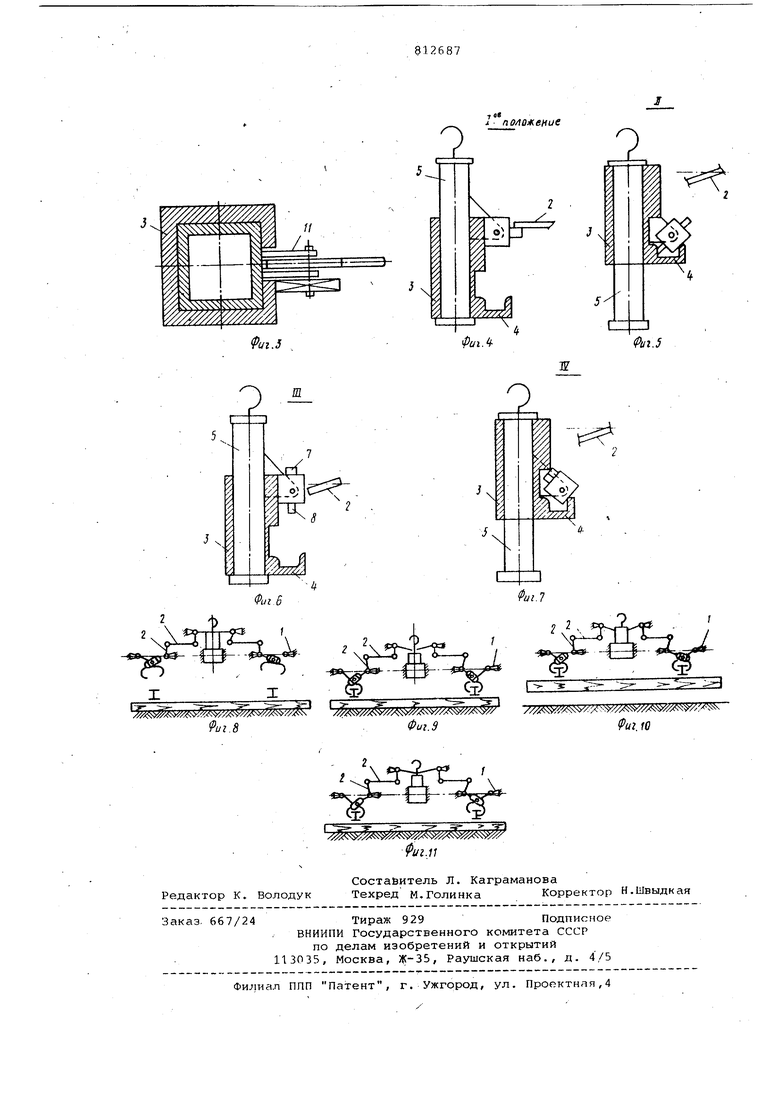
На фиг. 1 изображен общий вид механизма фиксации, разрез; на фиг. 2 - то же, вид сбоку; на фиг. 3 - то же, вид в плане; на фиг. 4-7 - схемы работы механизма
0 фиксации;на фиг 8-11 - соответствующие им схемы работы грузозахватного устройства.
Механизм фиксации для грузозахватного устройства содержит раму 1 (показано условно), шарнирно закреп5ленные рычаги 2, корпус 3 с упором 4, жестко закрепленный на раме 1, ползун 5, поворотный фиксатор 6 с выступами 7 и 8, ползун 5 выполнен с
0 верхним 9 и нижним 10 опорными буртами, контактирующими с корпусом 3. Корпус 3 представляет собой коробчатую конструкцию, поворотный фиксатор 6 выполнен, например, квадратного се5чения и закреплен на кронштейне 11 ползуна 5, а опорные бурты, верхний 9 и нижний 10, выполнены в виде колец.
Устройство работает следующим
0 образом.
При посадке грузозахватного устойства на груз рама 1 упирается в него и останавливается, а ползун 5 под действием собственного веса проолжает двигаться вниз до тех пор, пока поворотный фиксатор 6, упираясь в упор 4, не повернется на некоторый угол вокруг своей оси, т.е. ползун 5 из положения 1 переходит в положение II (фиг.4и 5). При переходе ползуна 5 из положения II в положение III (фиг.6) он поднимает поворотный фиксатор 6, который, упираясь стороной квадрата в. выступ упора 4 , повора 1ивается на 90° по ртношению к положению I. Ползун 5 продолжает подниматься до соприкосновения нижнего 10 опорного бурта в корпус 3, так как на поворотном фиксаторе б имеются выступы 7 и 8, то он занимает вертикальное положение и не отключает рычаги 2 грузозахватного устройства. При переходе из положения II1 в положение IV (фиг.7) поворотный фиксатор б, упираясь в выступ упора 4 корпуса 3, поворачивается на некоторый угол. При переходе из положения 1V в положение I поворотный фик- сатор б, упираясь в выступ упора 4, поворачивается на отношению к положению 111, при этом поворотный фиксатор б располагается в горизонтальном положении. При подъеме ползуна 5 до упора нижним 10 опорным буртом в корпус 3 поворотный фиксатор 6 отключает рычаги 2 грузозахватного устройства.
В механизме фиксации нижний 10 опорный бурт воспринимает нагрузки от грузозахватного устройства и поднимаемого труза , что увеличивает срок службы и повышает надежность работы механизма.
Формула изобретения
Механизм фиксации для грузозахватного устройства, содержащий раму с шарнирно закрепленными рычагами, корпус с упором, жестко закрепленный 5 .на раме, и ползун, расположенный в корпусе, снабженный поворотным фиксатором, взаимодействующим с упором корпуса, отличающийся тем, что, с целью разгрузки механизма фиксации от веса рамы и поднимаемого груза, поворотный фиксатор выполнен с выступами, взаимодействующими с рычагами, а поЛзун - с верхним и нижним опорными буртами, контактирующими с корпусом.
Источники информации, принятые во внимание при экспертизе
1Q 1. Меламед С.М. Автоматические захваты для штучных . М. , Машгиз, 1965, с. 95, рис. 59 (прототип) .
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ ФИКСАЦИИ ГРУЗОЗАХВАТНОГО УСТРОЙСТВА | 1992 |
|
RU2035380C1 |
| Захват-раскладчик для штучных грузов | 1977 |
|
SU789369A1 |
| Автоматический захват для штучных грузов | 1977 |
|
SU650946A1 |
| Захватное устройство для штучных грузов | 1989 |
|
SU1765096A1 |
| АВТОМАТИЧЕСКИЙ ЗАХВАТ РОДОВИКОВА | 2009 |
|
RU2394747C1 |
| Грузозахватное устройство для спуска и подъема плавучих объектов | 1982 |
|
SU1090614A1 |
| Грузозахватное устройство | 1990 |
|
SU1798290A1 |
| Грузозахватное устройство | 1986 |
|
SU1393760A2 |
| Грузозахватное устройство длягРузОВ C НЕСущиМ пОяСОМ | 1977 |
|
SU821383A1 |
| Грузозахватное устройство для подъема штучных грузов коробчатого сечения | 1974 |
|
SU550330A1 |
3:j
иг.1
х
W
иг.2
