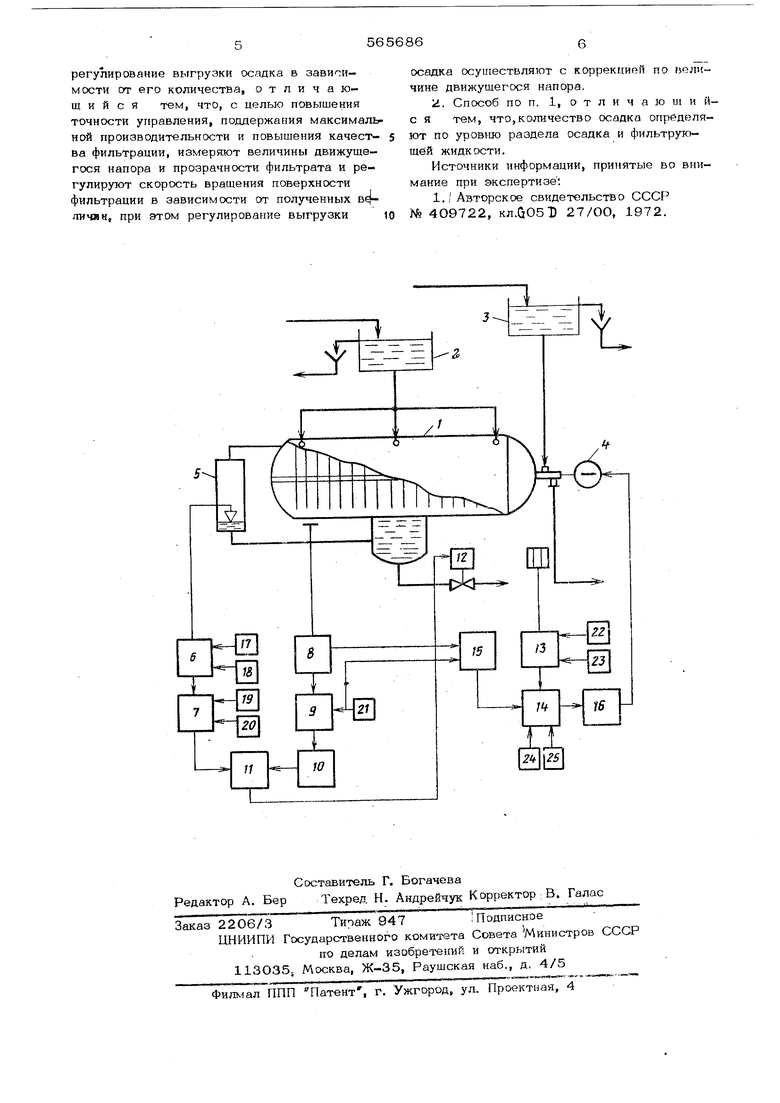
(54) СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРОЦЕССОМ ФИЛЬТРАЦИИИ вращения поверхности фипьтрации, блок 15 србшнения, блок 16 управления электроприв дом трубовала и задатчики 17-25. Работает устройство следующим образом. При включении фильтра-грязесгустителя 1 в работу в байпасном сосуде 5 устанавливается уровень раздела сред: фильтруемой жидкости и осадка, различающихся прозрачностью .и плотностью. Положение этого уров ня соответствует количеству осадка, скопившегося в нижней части фильтра-грязесгусти теля. ; При выходе (уровня раздела двух сред за пределы зоны, устансжленной задатчика ми 17у18, датчик-сигнализатор 6 посылает на вход блока 7 дискретные сигналы F,Шили Fj(i:). Последние принимают значения О или в зависимости от геометрического положения раздела сред ft относительно верхнего tl -.J. и нижнего Ь - пределов согласно еледующим логическим условиям; ---moix О при О при -1 при Блок 7 формирует управляющий сигналjU lib каналу уровень раздела сред-отвод1 осадка по закону l-),K.,F,Ct)-F2Hl i (3) при условии, что 0 /0 100%{4/ где Q - значение JU при f (i) -F., (i) Ч); KJ - коэффициент усиления; Х- - постоянная времени интегрирования. . Параметры настройки блока 7 Ку, и К устанавтшаются:задатчиками 19 и 20. Te самым реализуется И-закон регулирования при наличии релейного датчика-сигнализато ра, что обеспечивает плавность выгрузки осадка из фильтрат-грязесгустителя и, следовательно, стабильную работу следующей стадии обработки суспензии. Величина коррекции, вводимой в схему управления регулирующим органом выгрузки осадка, определяется по величине движудр()и его предельному знащего напора чению U р по соотношению
шах
I upCt)
(5)
Л)
Pwax
Формула изобретения
1, Способ автоматического управления процессом фильтрации, предусматривающий Величийу коррекции определяют с помощью напоромера 8, делительного блока 9, блока Ю извлечения квадратного корня и блока 11 умножения. Величина д р устанавливается задатчиком 21 в соответствии с уровнем перелива нефильтрованного продукта из напорного сборника 2. Управляющий сигнал с выхода блока 11 поступает на исполнительный механизм 12. Датчик-сигнализатор 13 прозрачности при снижении её величины ( до допустимой ( и предельной :,Ч границ, устанавливаемых адатчиками 22,23, посылает на вход блока 14 дискретные си налы F (-i) илиРу(4), принимающие значение при Ч.f о прм : -1при О Ф Когда движущий напор Д pC-l) достигает своего предельного значения д р блока 15 сравнения, поступает на вход блока 14 диск гетный сигнал f (f) принимающий значение Нпри др др О при В зависимости от комбинации условий 6,7,8 блок 14 формирует управляющий сигнал И на изменение | или стабилизацию скоч рости вращения поверхности фильтрации по закону Tf---no+K3-K F3(t)-,(i)-Fyti)cli О) при УСЛСЖИИ Ь $ И J где Пд -значение при SK.j(-t)Oj К J - коэффициент усЬления; Кд - постоянна интегрирования, Величины настройки t( и К ч устанав Сливаются задатчиками 24 и 25. Управляющий сигнал на изменение скорости вращения поверхности фильтрации из блока 14 поступает на вход блока 16 угравления электроприводом- трубовала.
регулирование выгрузки осадка в завиг: мости от его количества, о т л и ч а ющ и и с я тем, что, с целью повышения точности управления, поддержания максимальной производительности и повышения качества фильтрации, измеряют величины движущегося напора и прозрачности фильтрата и регулируют скорость вращения поверхности фильтрации в зависимости от полученных в4личач, при этом регулирование выгрузки
осадка осуществляют с коррекцией по величине движущегося напора.
. Способ по п. 1, отличаю щ и с я тем, что,количество осадка определяют по уровщо раздела осадка и фильтрующей жидкости.
Источники информации, принятые во внимание при экспертизе:
l.i Авторское, свидетельство СССР № 409722, КЛ.ООБЭ 27/ОО, 1972.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ РОТОРА РЕАКТИВНОЙ ГИДРАВЛИЧЕСКОЙ ТУРБИНЫ И ПИД-РЕГУЛЯТОР ЧАСТОТЫ ВРАЩЕНИЯ СИЛЬНОГО ДЕЙСТВИЯ | 2021 |
|
RU2781087C1 |
| Способ автоматического управленияРАбОТОй КАМЕРНОгО фильТР-пРЕССА | 1979 |
|
SU841650A1 |
| Способ автоматического управления комбайном и устройство для его осуществления | 1982 |
|
SU1084441A1 |
| Способ управления производительностью кристаллизационного отделения в сахарном производстве | 1987 |
|
SU1520102A1 |
| СПОСОБ ФОРМИРОВАНИЯ АДАПТИВНОГО СИГНАЛА УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ УГЛОВОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2569580C2 |
| Устройство для регулирования температуры воздуха в теплице | 1990 |
|
SU1720568A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРОПЕРЕДАЧИ ТЕПЛОВОЗОВ | 2011 |
|
RU2476332C1 |
| Способ управления процессом фильтрации в группе фильтров-сгустителей периодического действия | 1975 |
|
SU604569A1 |
| Система управления прессом | 1988 |
|
SU1620329A2 |
| Устройство для автоматического регулирования технологических параметров процессов фильтрации | 1974 |
|
SU529446A1 |
