Изо.бретение относится iK устройствам автоматического управления транспортными средствами, в частности к системам автоматического регулирования скорости поезда.
Известно устройство для автоматического регулирования скорости поезда, которое содержит приемник заданной скорости, индуктивно связанный с рельсовой цепью, датчик фактической скорости, подключенный к сигнальному входу блока сравнения заданной и фактической скоростей, к эталонному входу которого Подключен выход приемника заданной скорости, а IK выходу- исполнительные элементы управления тяговым двигателем блока автоведения, индуктивно связанного также с путевой линией связи. Однако в результате сравнения фактической и заданной скоростей в случае превышения фактической скорости над заданной блоком исполнения вырабатывается и передается в цепи управления тяговыми двигателями команда торможения с максимальным замедлением. Причем эта команда является единственной командой регулирования скорости. Такое регулирование скорости движения поезда приводит к существенному сбою графика поездов, так Как при выполнении такой команды увеличивается время хода по .перегону не только данного поезда, но лри большой интенсивности движения Поездов метрополитена увеличивается время хода и последующих поездов. Особенно этот недостаток проявляется лри оборудовании линии метрояолитена и подвижного состава устройствами автоведения (блок автоведения).
Цель изобретения - повышение точности выполнения графика движения поездов.
Цель достигается тем, что устройство снабжено блоком выдачи эталонного напряжения, входами подключенным к выходам приемника заданной скорости, а выходами - к эталонным входам блока сравнения скоростей, и блоком выбора команд, входами подключенными к выходам блока сравнения скоростей, а выходами - к входам исполнительных элементов управления тяговым двигателем.
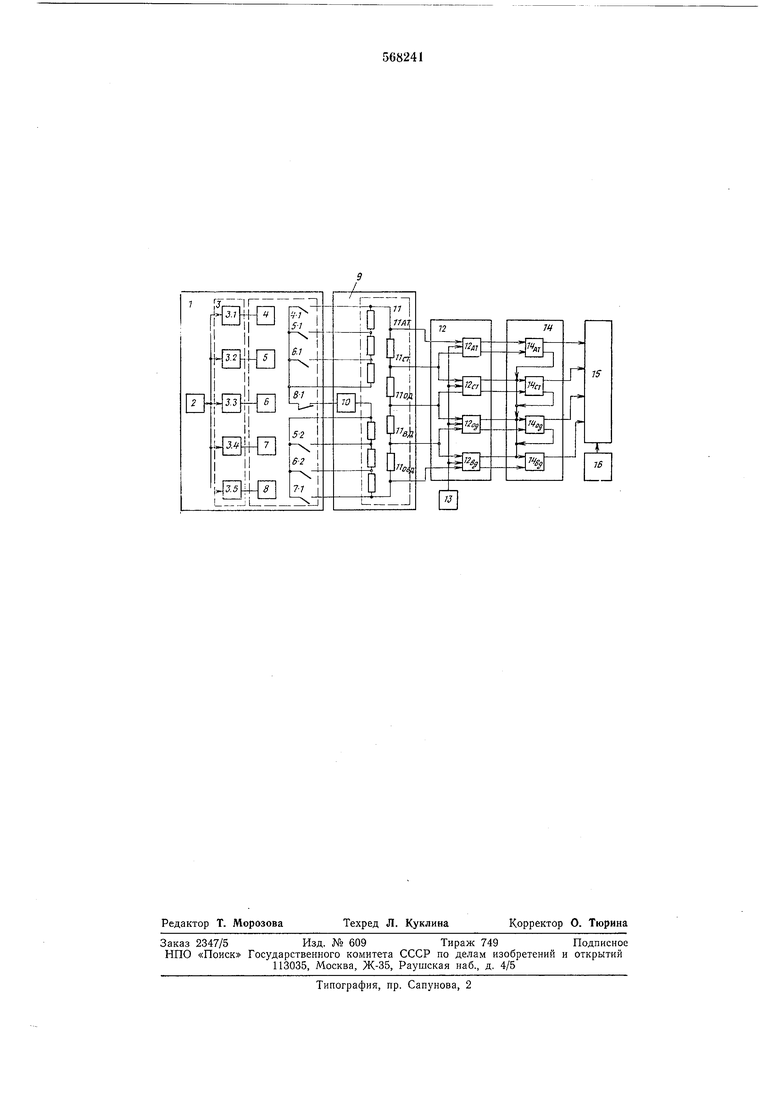
На чертеже представлена блок-схема предлагаемого устройства.
Приемник 1 заданной скорости имеет индуктивные катушки 2, включенные встречно для исключения наводок тягового тока.
Выход приемных катушек 2 подключен к фильтрам 3.1-3.5 сигнальных частот. Каждый фильтр выделяет только одну из частот 275, 225, 175, 125, 75 Гц. Выходы фильтров 3.1-3.5 подключены к соответствуюнщм реле 4-8, каждое из которых со3
ответствует задаппой скорости О, 40, 60, 75, 90 км/ч.
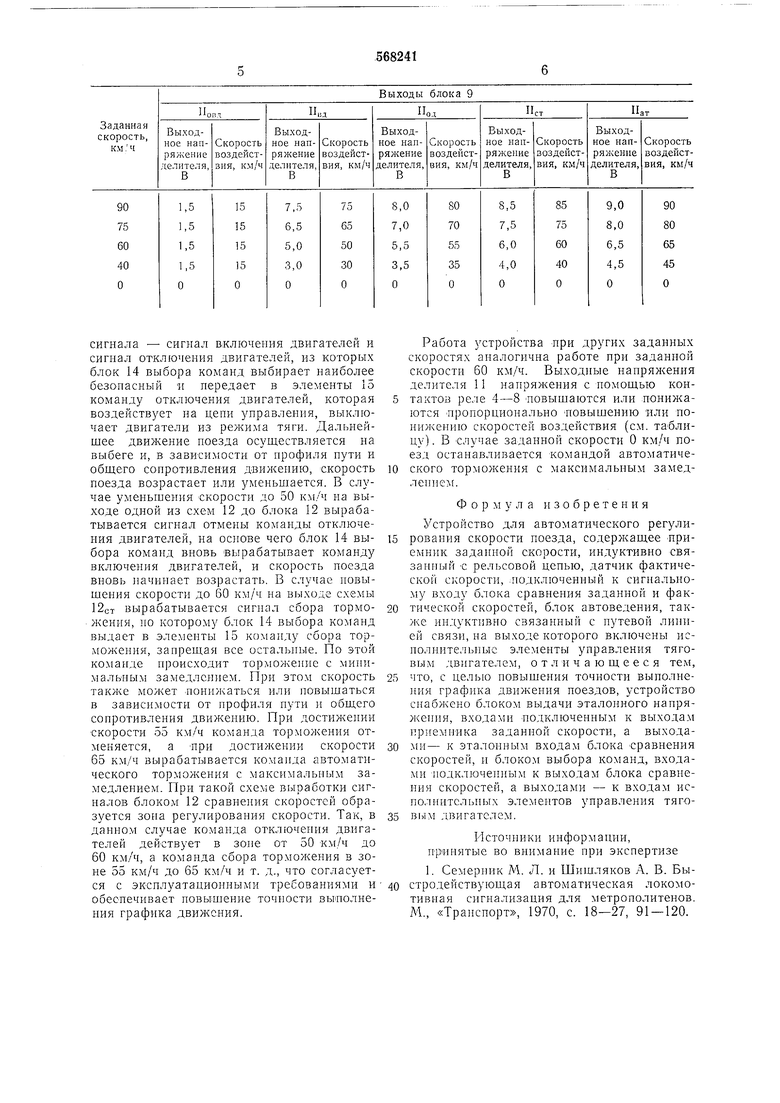
Блок 9 выдачи эталонного напряжения имеет источник 10 иостоянного тока и делитель 11 напряжения. Входы делителя 11 напряжения подключены к контактам 4.1-8.1, 5.2, 6.2 реле 4-8 приемника 1 заданной Скорости. Величины напряжений на выходах Пат. Ист. Иод, Ивд, Иовд делителя И на/пряжения проиорциональны скоростям воздействия на тяговые двигатели поезда, где ат - автоматическое торможение с максимальным замедлением; ст - сбор торможения, обеспечиваюш,ий движение поезда с равновесной скоростью, либо минимальное замедление; од - отключение двигателей; вд - включение двигателей; ОВД - отмена включения двигателей.
Блок 2 сравнения заданной и фактической скоростей содержит логические эледменты контроля скоростей и выделения зон (.пределов) регулирования. Такими логическими элементами являются нуль-органы (схемы сравнения постоянных напряжений) и инверторы. Для выделения каждой скорости воздействия При.менены схемы, состоящие из двзх нуль-органов и двух инверторов. К эталонным входам блока 12 сравнения подключены выходы делителя И напряжения, а к сигнальному входу - выход датчика 13 фактической скорости, состоящего из тахогенератора и Преобразователя частоты в напряжение, пропорциональное фактической скорости.
Выходы блока 12 сравнения подключепы к входам блока 14 выбора команд, выполненного на основе бистабильных элементов. Кал дому бистабильному элементу соответствует пара нуль-органов с выходными инверторами блока 12. Индексы у блоков 12 н 14 означают то же, что и у блока И. Включение бистабильных элементов выполнено по приоритетной схеме, обеспечивающей выбор команды, отвечающей требованиям наибольщей безопасности движения. Выходы блока 14 выбора команд подключены к одним входам исполнительных элементов 15 управления тяговым двигателем, а к другим входам его подключен блок 16 автоведения.
Элементы 15 выполняют как команды регулирования скорости, поступающие с блока 14 выбора команд, так и команды автоматического управления, поступающие с блока 16 автоведения.
Устройство работает следующим образом.
Поезд со станции отправляется по сигналам закрытия вагонных дверей и включения Двигателей в режим тяги, принимаемым блоком Ii6 автоведения с Путевых линий связи. По этим сигналам блок 16 вырабатывает соответствующие команды и через элементы 15 воздействует на цепи управления тяговыми двигателями. Эти же команды, независимо от блока 16 автоведения, могут
6i)iTi) поданы и маппшистом, который непосредствен)1о воздействует па цепи управления тяговыми двигателями. Причем в обоих случаях двигатели включаются в режим тяги, если заданная скорость отлична от нуля. Информация о заданной скорости снимается с рельсовой цени приемииком 1. В рельсовые цепи посылается сигпальпый ток одной из частот, соответствующей скорости, выбираемой из соображений выполнения графика движения и условий безопасности движения Поездов.
Сигпалы рельсовой цепи воспринимаются в приемнике 1 катущками 2, выявляются
фильтрами 3.1-3.5 и фиксируются реле 4-8.
Поезд со станции по командам автоведения отправляется При заданной скорости движения не менее 60 км/ч, что обусловливается условиями сближения с впереди идущими поездами при нормальном движении. В этом случае в рельсовую цепь посылается сигнал частотой 175 Гц, которая выявляется фильтром 3.3 и фиксируется реле 6.
Контактами 6.1, 6.2 обеспечивается коммутация делителя 11 напряжения блока 9 таким образом, что на его выходах вырабатываются постоянные иа-пряжепия, пропорциональные скоростям воздействия в соответствии с таблицей.
Выходные напряжения делителя И напрял ения Подаются на эталонные входы блока 12 сравнения скоростей, где они сравниваются с напряжением, пропорциоцальцым фактической скорости движеиия поезда, лоданиым с выхода датчика 13 фактической скорости.
При возрастании фактической скорости до 15 «м/ч одной из схем 12вд блока 12 вырабатывается сигнал включения двигателей в режим тяги, на основе которого блоком 14 выбора команд при условии отсутствия других сигналов вырабатывается команда включения двигателей. Эта команда лередается в элементы 15 и является подтверждением ранее выработанной команды блоком 16 или мащинистом.
Такое ограничение ло скорости выработки команды включения двигателей, т. е. ограничение начала регулирования скорости, объясняется тем, что в условиях метрополитена движение Поезда со скоростью менее 15 км/ч может быть только в двух случаях: в случае непредвиденной остановки поезда
на перегоне по условиям безоласпости двил ения и в случае остановки поезда на станции. В обоих этих случаях дальнейщее движение -поезда должно осуществляться либо машинистом, либо блоком 12 автоведения.
При достижении скорости поезда 55 км/ч одной из схем блока 12 сравнения скоростей вырабатывается сигнал отключения двигателей. Таким Образом, на выходе блО
ка 12 сравнения скоростей имеются два
сигнала - сигнал включения двигателей и сигнал отключения двигателей, из которых блок 14 выбора команд выбирает наиболее безопасный и передает в элементы 15 команду отключения двигателей, которая воздействует на цени управления, выключает двигатели из режима тяги. Дальнейшее движение поезда осуществляется на выбеге и, в зависимости от профиля пути и общего сонротнвления движению, скорость иоезда возрастает или уменьшается. В случае уменьшения скорости до 50 км/ч на выходе одной из схем 12 до блока 12 вырабатывается сигнал отмены команды отключения двигателей, на основе чего блок 14 выбора команд вновь вырабатывает команду включения двигателей, н скорость поезда вновь начинает возрастать. В случае повышения скорости до 60 км/ч на выходе схемы 12ст вырабатывается сигнал сбора торможения, но которому блок 14 выбора команд выдает в элементы 15 команду сбора торможения, занреш,ая все остальные. По этой команде происходит торможение с минимальным замедленнем. При этом скорость также может понижаться или повышаться в зависимости от профиля пути и общего соиротивлепия движению. При достижении скорости 55 км/ч команда торможення отменяется, а нри достижении скорости 65 км/ч вырабатывается комаида автоматического торможения с максимальиым замедлением. При такой схеме выработки сигналов блоком 12 сравнения скоростей образуется зона регуоТирования скорости. Так, в данном случае команда отключення двнгателей действует в зоне от 50 км/ч до 60 км/ч, а команда сбора торможения в зоне 55 км/ч до 65 км/ч и т. д., что согласуется с экснлуатаннонными требованиями и обеспечивает повышение точности вьгнолнения графика движения.
Работа устройства при других заданных скоростях аналогична работе нри заданной скорости 60 км/ч. Выходиые нанряжения делителя 11 напряжения с номощью коитактов реле 4-8 повышаются или понижаются нронорционально повышению или понижению скоростей воздействия (см. та блину). В случае заданной скорости О км/ч иоезд останавливается командой автоматического торможения с максимальным замедлением.
Формула изобретения
Устройство для автоматического регулнроваиия скорости поезда, содержащее приемннк заданной скорости, индуктивно связанный С рельсовой ненью, датчик фактической скорости, лодключеииый к сигнальному входу блока сравнения заданной и фактической скоростей, блок автоведеиия, также индуктнвно связанный с нутевой линней связи, на выходе которого включены исполиительиыс элемеиты управления тяговым двигателем, отличающееся тем,
что, с нелью повышения точности вынолнення графика движения поездов, устройство снабжено блоком выдачи эталонного нанряжеиия, входами нодключенным к выходам 17риемннка заданной скорости, а выходаМП- к эталонным входам блока сравнення скоростей, н блоком выбора команд, входами подключенным к выходам блока сравнения скоростей, а выходами - к входам исполпнтсльпых элементов управления тяговым двигателем.
И сто ч НИКИ н н фо р м а нн н, принятые во внимание при экспертизе
1. Семерник А1. Л. и Шишляков А. В. Быстродействующая автоматическая локомотивная сигналнзания для метрополитенов. М., «Тра 1спорт, 1970, с. 18-27, 91 - 120.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления движением поездов | 1976 |
|
SU592067A1 |
| СИСТЕМА УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ТЯГОВОГО ПОДВИЖНОГО СОСТАВА | 2010 |
|
RU2429152C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 2006 |
|
RU2326016C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СКОРОСТИ ДВИЖЕНИЯ ПОЕЗДА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2399515C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СКОРОСТИ ДВИЖЕНИЯ ДЛИННОСОСТАВНОГО ГРУЗОВОГО ПОЕЗДА | 2022 |
|
RU2789231C1 |
| УСТРОЙСТВО ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ ПОДВИЖНОГО СОСТАВА НА СТАНЦИИ | 2004 |
|
RU2277055C1 |
| СПОСОБ УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ТЯГОВОГО ПОДВИЖНОГО СОСТАВА И ЕДИНАЯ КОМПЛЕКСНАЯ СИСТЕМА (ЕКС) ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2355596C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ СКОРОСТИ ДВИЖЕНИЯ ПО УЧАСТКУ ЖЕЛЕЗНОЙ ДОРОГИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2510346C1 |
| Устройство для управления движением поезда | 1975 |
|
SU561684A1 |
| СИСТЕМА УПРАВЛЕНИЯ АВТОМАТИЧЕСКОЙ ПЕРЕЕЗДНОЙ СИГНАЛИЗАЦИЕЙ И СПОСОБ ЕЕ ОСУЩЕСТВЛЕНИЯ | 2021 |
|
RU2756140C1 |