1
Изобретение относится к области автоматизации экскаваторов-драглайнов и предназначено для управления углом наклона ковша.
Известно устройство для управления (регулирования) положением рабочего органа (ковша) экскаватора-драглайна 1.
Известно также устройство для управления приводом органа грузоподъемной машины, например драглайна, включаюш;ее датчики нагрузки усилий приводов подъема и тяги 2.
Однако эти устройства не позволяют в процессе транспортировки груженого ковша автоматически поддерживать постоянный угол иаклона его дниш,а к горизонту, обеспечиваюш,ий минимальные потери грунта. Это существенно снижает производительность экскаватора-драглайна.
С HCJbf; повышения производительности экскаватора за счет стабилизации угла наклона ковша, устройство снабл :ено датчиками ноложс 1ия разгрузочного шкива, блоками онределения положения разгрузочного шкива и управления наклоном ковша, к одному из входов которого подключен датчик усилия в механизме тяги, а ко второму через блок определения положения разгрузочного шкива- датчики положения разгрузочного шкива, а выход блока управления наклоном ков2
ша соединен с приводом механизма наклона ковша.
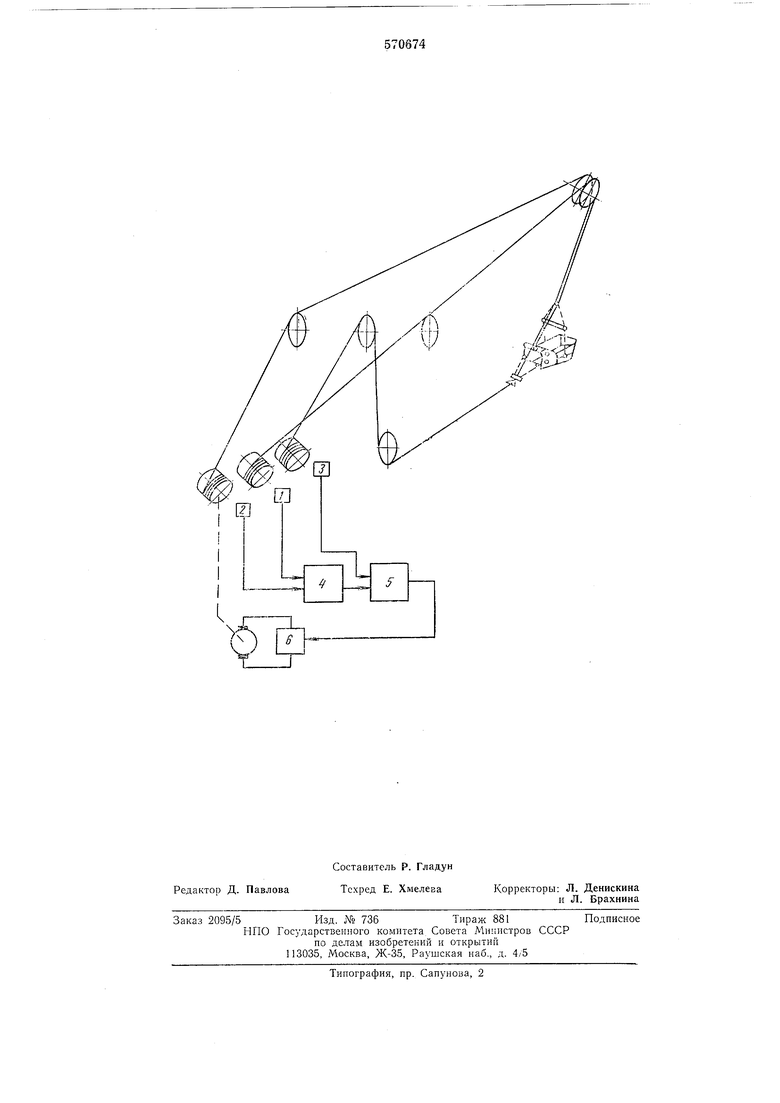
На чертеже представлена стрзктурная схема устройства.
Устройство включает датчики 1 и 2 длин канатов механизмов подъема и наклона ковша, датчик 3 усилия в механизме тяги, блок 4 определения положения разгрузочного шкива, блок 5 управления наклоном ковша и унравляемый преобразователь 6 привода механизма наклона ковша.
К датчикам 1 и 2 длин канатов механизмов нодъема и наклона ковша подключены соответствуюпще входы блока 4 определения положепия разгрузочного шкива. Выход его соединен с одним из входов блока 5 управления наклоном ковша, другой вход которого подключен к датчику 3 усилия в механизме тяги. Выход блока 5 управления наклоном ковша
связан с управляемым преобразователем 6 привода механизма наклона ковша. Устройство работает следуюш,им образом. При отрыве груженого ковша от забоя машинист с помош,ью механизма наклона ковша, перемешаюш,его разгрузочный шкив вдоль подъемных канатов, устанавливает оптимальный угол наклона дниша ковша, обеспечиваюший минимальные потери грунта. Сигналы с датчиков 1 и 2 длин канатов механизмов
подъема и наклона ковша поступают на вход
блока 4 определения положения разгрузочного шкива, который вычисляет разность длин этих канатов и тем самым определяет положение разгрузочного шкива, соответствующее оптимальному углу наклона ковша. В дальнейшем в течение всего процесса транспортировки ковша устройство обеспечивает стабилизацию этого угла. Для этого сигналы с датчика 3 усилия в механизме тяги и с выхода блока 4 определения положения разгрузочного шкива непрерывно поступают насоответствуюш,ие входы блока 5 управления наклоном ковша, а сигнал, снимаемый с выхода этого блока, воздействует через управляемый преобразователь 6 на привод механизма наклона ковша. При этом механизм наклона ковша неремеш,ает разгрузочный шкив вдоль подъемных канатов так, что он для каждого нового положения ковша под стрелой займет такое положение, чтобы сохранить постоянным суммарную величину моментов сил, действуюндих на ковш.
Таким образом, в течение всего процесса транспортировки обеспечивается автоматическая стабилизация оптимального угла наклона ковша, заданного машинистом при отрыве ковша от забоя. После транснортировки груженого ковша к месту разгрузки машинист вручиую воздействует через управляемый преобразователь 6 на привод механизма наклона ковша так, чтобы разгрузочный шкив переместился в нижнее крайнее положение, при этом равенство моментов сил, действуюш,их на ковш, нарушается и ковш опрокидывается.
Применение устройства для управления ковшом экскаватора-драглайна позволяет исключить потери грунта из ковша во время операции транспортировки за счет автоматической стабилизации угла наклона ковша и обеспечивает повышение производительности драглайна в среднем на 7-12%. .
Формула изобретения
Устройство для унравления ковшом экскаватора-драглайна, содержаш,ее датчик усилия в механизме тяги и привод механизма наклона ковша, отличаюш,ееся тем, что, с целью повышения производительности экскаватора за счет стабилизации угла наклона ковша, оно снабжено датчиками положения разгрузочного шкива, блоками определения
положения разгрузочного шкива и управления наклоном ковша, к одному из входов которого подключен датчик усилия в механизме тяги, а ко второму через блок определения, положения разгрузочного шкнва - датчики
ноложения разгрузочного шкива, а выход блока унравления наклоном ковша соединен с нриводом механизма наклона ковша.
Источники информации, принятые во внирлание при экспертизе
1. Авторское свидетельство СССР jVe 447803, кл. Е 02F 3/48, 1970.
2. Авторское свидетельство СССР № 384990, кл. Е 02F 3/48, 1971.
.J
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ оценки качества управления экскаватором-драглайном | 1985 |
|
SU1344868A1 |
| Способ оптимального управления электроприводами драглайна | 1979 |
|
SU926163A1 |
| Способ определения положения экскаватора-драглайна в пространстве | 1983 |
|
SU1121356A1 |
| Способ контроля процесса заполнения ковша-экскаватора-драглайна | 1985 |
|
SU1298311A1 |
| Рабочее оборудование экскаватора-драглайна | 1982 |
|
SU1116124A1 |
| Рабочее оборудование экскаватора -драглайна | 1975 |
|
SU636331A1 |
| Рабочее оборудование экскавато-PA-дРАглАйНА | 1979 |
|
SU810900A1 |
| Способ оперативного контроля использования экскаватора-драглайна | 1986 |
|
SU1328451A1 |
| Способ управления разгрузкой ковша экскаватора-драглайна | 1987 |
|
SU1502723A1 |
| Способ управления разгрузкой ковша экскаватора-драглайна | 1985 |
|
SU1263761A2 |