1
Изобретение относится кгидроприводам машии-автоматов, манипуляторов и других устройств с программируем1лм движением.
Известен гидропровод, например, манипулятора, содержащий программное устройство, связанное с исполнительны1ми механизмами и гидродвигателями, обеспечивающий заданные траектории движения рабочих органов.
Недостатками этого гидропривода является необходимость применения большого числа следящих систем управления, низкий КПД ( за счет дросселирования жидкости), трудность обеспечения- максимальной производительности манипулятора при ограниченной мощности приводного(Двигателя.
Известен также гидропривод, например/ машин-автоматов, содержащий программное устройство, регулируемые исполнительными механизмами насосы, соединенные общим валом приводного двигателя и независимо сообщенные с соответствующими гидродвигателями.
Однако в таком приводе нет средств обеспечйваницрх минимальное время рабочего цикла машины-автомата при изменякхцейся нагрузке, т.е. мощность приводного двигателя используется неполностью.
Целью изобретения является обеспечение минимального времени рабочего цикла при изменяющейся нагрузке.
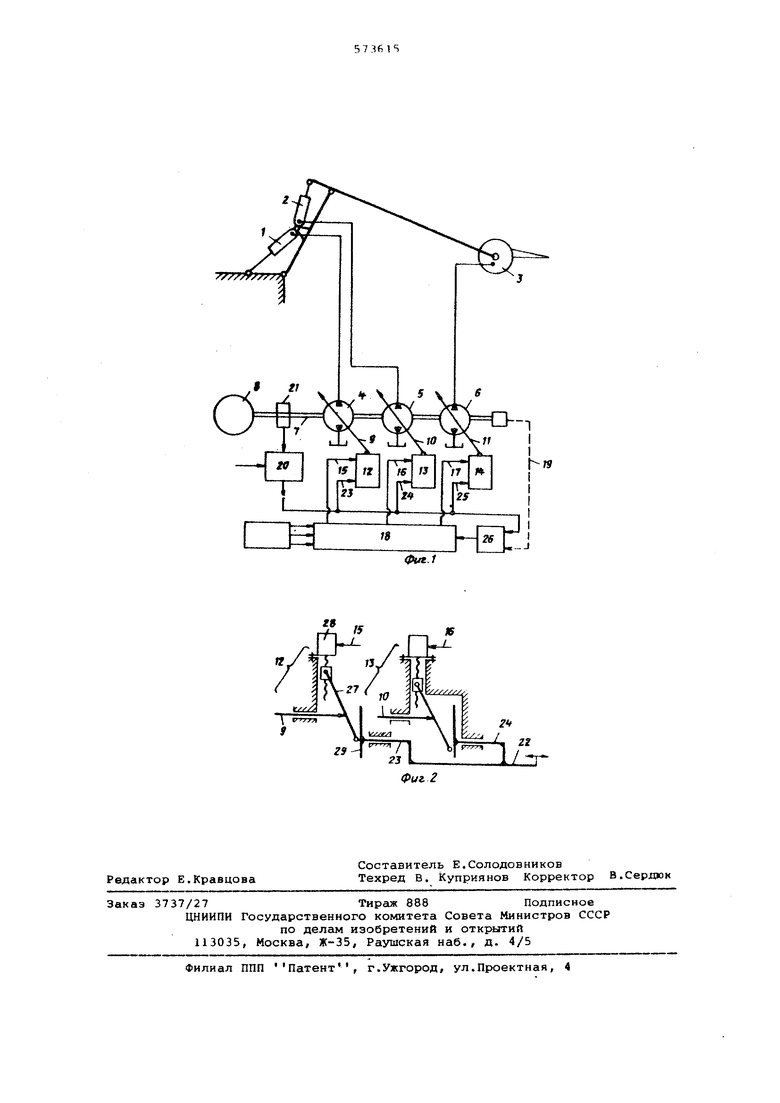
Это достигается тем, что исполнительные механизмы выполнены в виде цвухканальных блоков перемножения, первые каналы которых сообщены программным устройством, а вторые соединены с общим синхронизирующим Устройством, например механической тягой, и приводной двигатель снабжен датчиком момента с регулятором мощности, соединенным с синхронизирующим устройством и программным устройством. На фиг.1 показана схема предложенного гидропривода; на фиг.2 - двухканальный исполнительный механизм.
Гидродвигатели 1, 2, 3 манипулятора независимо сообщены с регулируемыми объемными насосами 4,5,6 соответст венно. Насосы соединены общим валом 7, связанным с приводным двигателем S. Выходные элементы - задатчики 9, 10, 11 удельного объема насосов 4, 5, 6 - приводятся соответствующими исполнительными механизмами 12, 13, 14, выполненными в виде двухканальных блоков перемножения, по которым поступают входные управляющие сигналы. Первые каналы-15, 16, l7 исполнительных механизмов сообщены с программным устройством 18, задающим насосам требуемое для движения рабочего органа по заданной траектории соотношение удельных объемов насойов в функции времени (при постоянной ско рости вращения вала 7) или в функции скорости вращения вала 7, определяемой датчиком, .сигнал которого передается по линии 19 (если скорость вращения вала изменяетсяJ. Гидропривод снабжен регулятором мощности 20, связанным с датчиком 21 крутящего момента, установленным на валу 7, что обеспечивает поступление на регулятор 20 сигнала, прОпорционгшьного суммарному моменту на всех насосах. Регулятор 20 общим синхронизирующим устройством, например механической«тягой 22 соединен со вторыми входными каналами 23, 24, и 25 исполнительных механизмов 12, 13, 14 и через дополнитель ный блок перемножения 26 - с программным устройством 18. Блок 26 обеспечивает развертку программы со скоростью, пропорциональной скорости вра щения вала 7 и величине перемещения тяги 22. При 1постоянной скорости вращения вала 7 блок 26 и синхронизирующая связь не нужны. Исполнительный механизм каждого насоса содержит наклонную планку 27, связанную с исполнительным механизмом 28 программного устройства 18 и с направляющей поверхностью 29 тяги канала 23. Исполнительные механизмы. 28 осуществляют изменение соотношения удельных объемов насосов за счет смещения элементов 9, 10, 11 без изменения углов наклона планок 27. Измен ние положения тяги 22 вызывает измене ни1 угла наклона планок 27 и одноврем но изменение абсолютных значений удел ных объемов насосов без изменения установзгенного между ними соотношения, а следовательно и без изменения соотношения скоростей гидродвигателей 1, 23 Работает гидропривод следующим образом. Пусть регулятор 20 настроен на максимальную мощность двигателя 8 и при максимальном моменте на валу 7 и нормальном нагружении рабочего оргача тяга 22 находится в среднем .поло жении. Если нагрузка на двигатель 8 остается постоянной, рабочий орган пе ремещается по заданной траектории с эадаиньвш скоростями, определяемыми програквиным устройством 18 (положение тяги 22 при неизменной нагрузке фиксировано). Если в процессе движения рабочего органа по траектории нагрузка на гидродвигатели изменится так, что увеличится нагрузка двигателя 8, возникнет рассогласование на регуляторе 20. Это приведет к изменению положения связанного с ним синхронизирующего устройства - тяги 22. Изменение угла наклона планок 27 изменяет абсолютные значения . удельных объемов насосов, не меняя заданное по каналам 15, 16, 17 соотношение между их величинами. В результате при увеличении нагрузки тяга 22 перемещается влево и скорость движения рабочего органа уменьшается. При этом пропорционально изменяется и скорость развертки программы изменения соотношений, что обеспечивает сохранение движения рабочего органа по заданной траектории без превышения установленной мощности двигателя 8. Уменьшение нагрузки на рабочий орган приводит к возрастанию скорости его движения по траектории (тяга 22 смещается вправо, а скорость развертки программы возрастает) при сохранении постоянства крутящего моментана валу. Таким образом,, предложенный; гидропривод, обеспечивая высокий КПД, свойственный объемному регулированию скорости движения гидродвигателей, осуществляет движение рабочего органа по заданной траектории с максимально возможной скоростью, соответствующей конкретным условиям- нагружения рабочего органа и потреблению максимальной мощности от приводного двигателя, что обеспечивает выполнение рабочего цикла за минимальное время. Формула изобретения Гидропривод, например манипулятора, содержащий программное устройство, регулируемые исполнительными механизмами насосы,соединенные общим валом приводного двигателя и независимо сообщен-ные с соответствующими гидродвигателями,отличающийся тем, что, с целью обеспечения минимального времени рабочего цикла при изменяющейся нагрузке, исполнительные механизмы выполнены в виде двухканальных блоков перемножения, первые.каналы которых собщены с программным устройством,а вторые соединены с общим синхронизирующим устройством, например механической тягой, и приводиой двигатель снабжен датчиком момента с регулятором мощности, соединенным с сиихронизирущим и прогргшмным устройствами.
«.-J
Ф1Л.1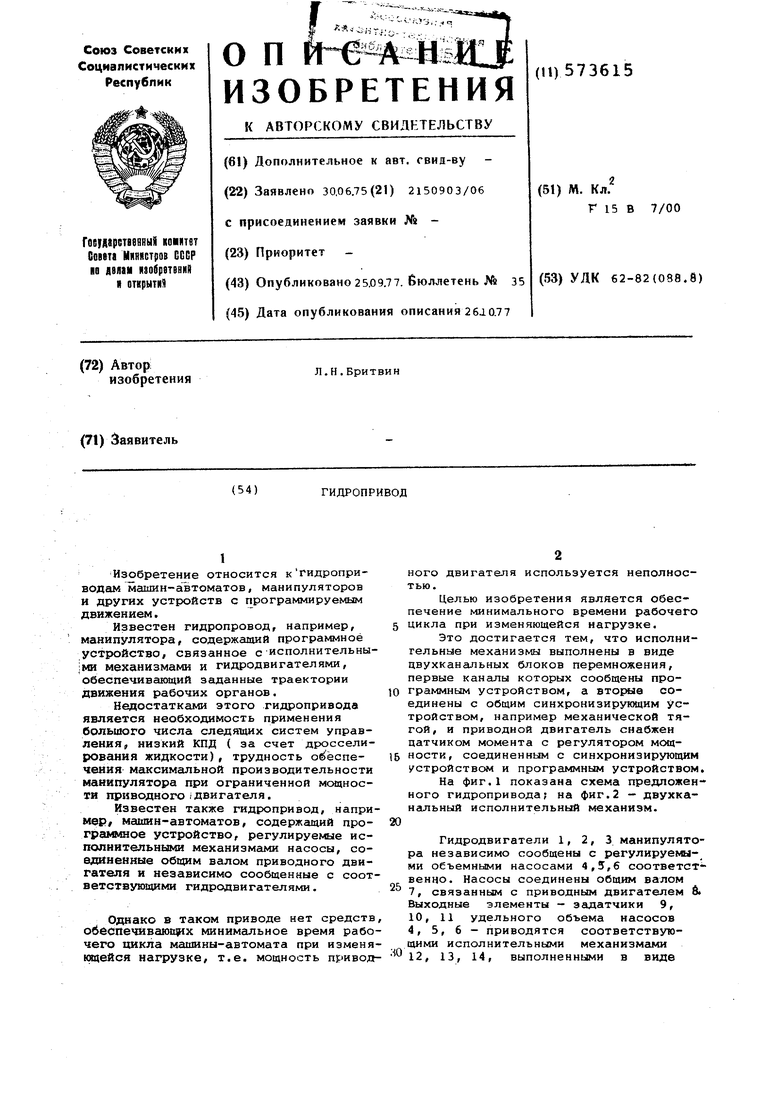

| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОПРИВОД МЕХАНИЗМА ПОВОРОТА СТОЙКИ ОПОРНО-ПОВОРОТНОГО УСТРОЙСТВА КРАНО-МАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2002 |
|
RU2252911C2 |
| СПОСОБ РЕКУПЕРАЦИИ ЭНЕРГИИ ГИДРОПРИВОДА ПОВОРОТНОЙ ПЛАТФОРМЫ ЭКСКАВАТОРА | 2016 |
|
RU2618154C1 |
| Гидропривод одноковшового экскаватора | 1990 |
|
SU1751279A2 |
| Гидропривод лесозаготовительной машины | 1979 |
|
SU1079001A1 |
| Устройство для управления манипулятором | 1976 |
|
SU692722A1 |
| НАСОСНО-АККУМУЛЯТОРНЫЙ ГИДРОПРИВОД | 2000 |
|
RU2184281C2 |
| ГИДРОСИСТЕМА КРАНО-МАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2003 |
|
RU2252909C2 |
| Многоканальный гидропривод | 1987 |
|
SU1439294A1 |
| Гидропривод манипулятора | 1982 |
|
SU1137256A1 |
| Гидропривод манипулятора | 1976 |
|
SU817331A1 |