Изобретение относится к измерительной техниice же;1езнодорожного транспорта.
Извест 10 передвижное устройство для определения положения рельсовой нити в вертикальной пл(х;к()сти, содержащее раму, опирающуюся на. ходовые тележки, ipH подвижных в вертикальной плоскости контактных органа, представленных ненагрженными измерительными тележками, средняя из которых размещена ме/вду ходовыми тележками, а две концевые - с внеи1них сторон ходовых тележек, тензометрический дат чик, расположенный в вертикальной продольной плоскости, и щарнирно-соединенный с рамой угловой рыш-, горизонтальное плечо которого направлено в сторону конца рамы к связано с одной из концевых измерительных тележек, указательный и регистрируннций приборы 1 .
Однако такое устройство не обеспечивает необходимой точности измерений.
Цель изобретения - новыщение точности измерений.
Для этого устройство снабжено вторым тензометрическим датчиком и тремя расположенными так же в вертикальной продольной плоскости и пнрнирно-закрепленными на раме угловыми рыча1ами, диа из которых горизонтальными плечами,
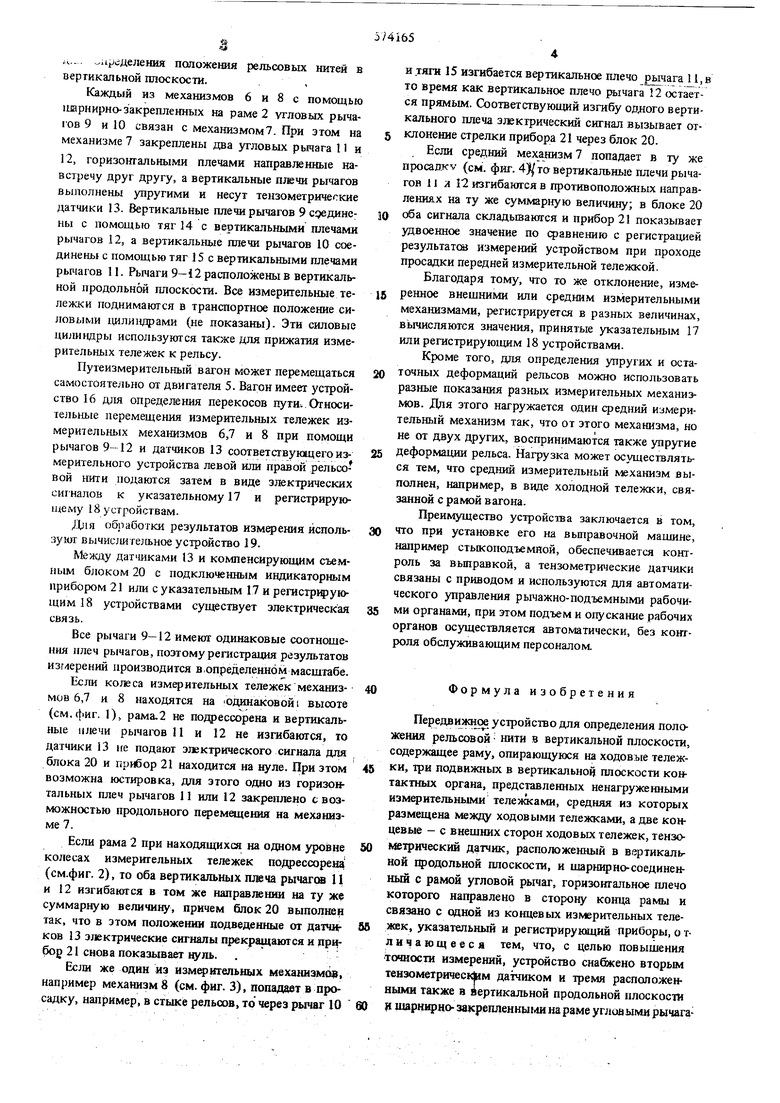
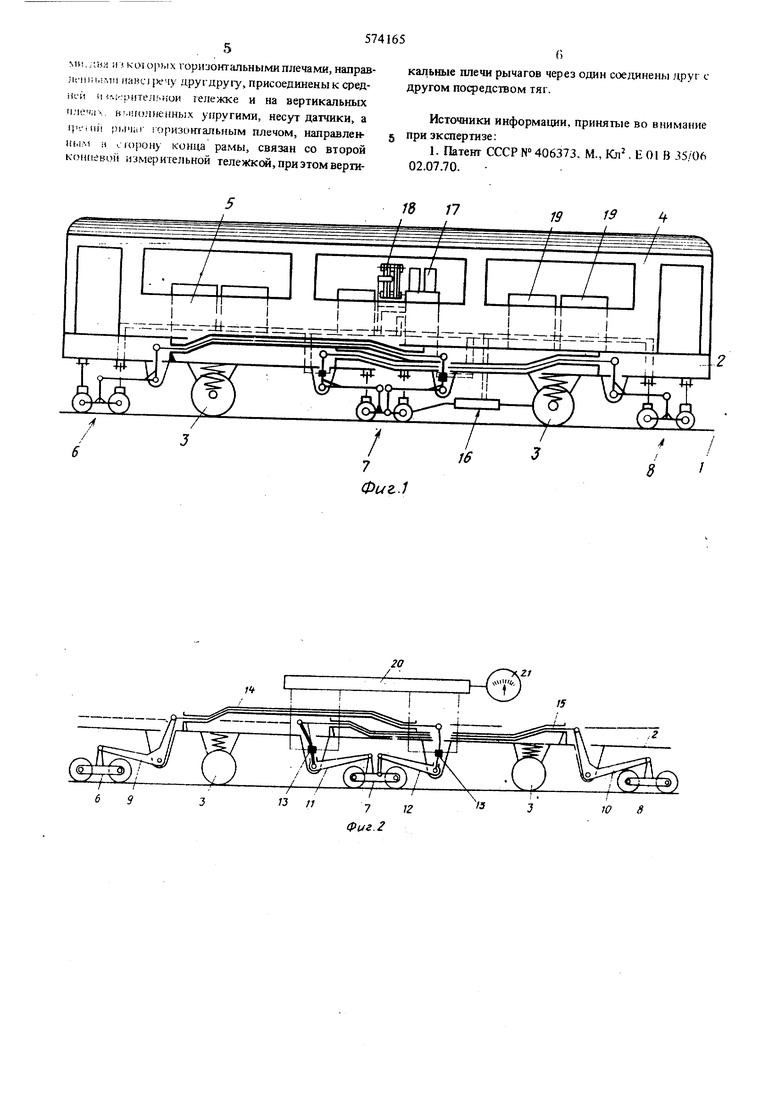
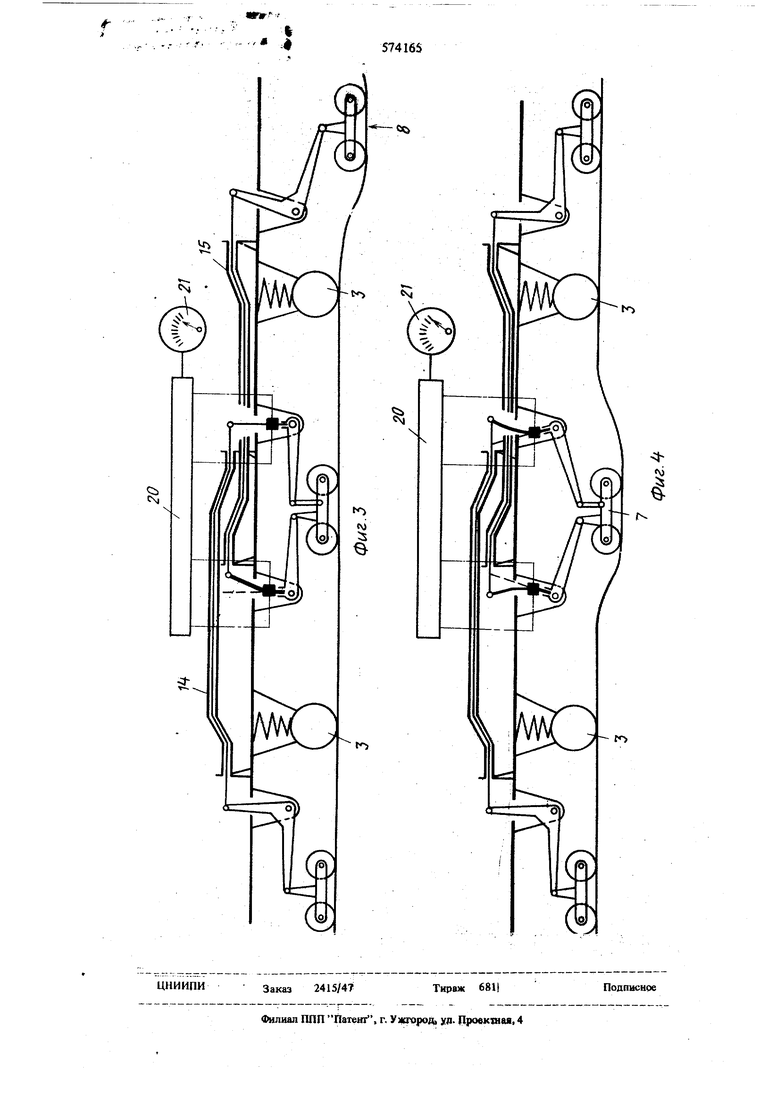
направленными навстречу друг другу, присоединены к средней измерительной тележке и на вертикальных плечах, вьшолненных упругими, несут датчики, а третий рычаг горизонтальным плечом, направленным в сторону конца рамы, связан со второй концевой измерительной тележкой, при зтом вертикальные плечи рычагов, через один соединены друг с другом с помощью тяг.На фиг. 1 показан общий вид путеизмерительного вагона с устройством для определения положения рельсовой нити в вертикальной плоскости; на фиг. 2 - предлагаемое устройство в увеличенном мас1игабе; на фиг. 3 - то же, при проходе просадки передней измерительной тележкой; на фиг.4 - то же, при проходе просадки средней измерительной тележкой.
Путеизмерительный вагон, передвигающийся по рельсовому пути 1, родержитраму 2, опдфающуккя на ходовые тележки 3, установленные на раме кузова 4, приводной двигатель 5, связанный с тележками 3.
Между тележками 3, а также по концам путеизмерительного вагона расположены измерительные тележки измерительных механизмов 6,7 и 8 А.--iijJcMejieHHH положения рельсовых нитей в вертикальной плоскости.., Каждый из механизмов 6 и 8 с помощью 1шрнирно-закрепленных на раме 2 угловых рычагов 9 и 10 связан с механюмом. При этом на механизме 7 закреплены два ja-ловых рьяага 11 и 12, горизонтальными плечами направленные навстречу друг другу, а вертикальные плечи рычагов выполнены упругими и несут тензометрнческие датчики 13. Вертикальные плечи рычагов 9 средине; ны с помощью тяг 14 с вертикальными плечами рычагов 12, а вертикальные плечи рычагов 10 соединены с помощью тяг 15 с вертикальными плечами рычагов 11. Рычаги 9-12 расположены в вертикальной продольной плоскости. Все измерительные тележки поднимаются в транспортное положение силовыми щлиндрами (не показаны). Эти силовые цилиндры используются также для прижатия измерительных тележек к рельсу. Путеизмерительный вагон может перемещаться самостоятельно от двигателя 5. Вагон имеет устройство 16 для определения перекосов путш.Относительные перемещения измерительных тележек измерительных механизмов 6,7 и 8 при помощи рычагов 9-12 и датчиков 13 соответствующего измерительного устройства левой или правой рельсовой нити подаются затем в виде электрических сигналов к указательному 17 и регистрирую цему 18 устройствам. Для обработки результатов измерения используют вычиоштельное устройство 19. Между датшками 13 и компенсирующим съемным блоком 20 с подключенным индикаторным прибором 21 или с указательным 17 и регистрирующим 18 устройствами существует электрическая связь. Все рычаги 9-12 имеют одинаковые соотношения плеч рычагов, поэтому регастрация результатов изг/1ерений производится в.определенном масштабе. Если колеса изм)ительных тележек механизмов 6,7 и 8 находятся на Одшаковой высоте (см. фиг. 1), рама.2 не подрессорена и вертикальные плечи рычагов 11 и 12 не изгибаются, то датчики 13 не подают электрического сигнала для блока 20 и прибор 21 находится на нуле. При этом возможна юстировка, для этого одно из горизонтальных плеч рычагов 11 или 12 закреплено с возможностью продольного перемацения на механизме 7. Если рама 2 при находящихся на одном ypoiSHe колесах измерительных тележек подрессорена (СМ.ФИГ. 2), то оба вертикальных плеча рычагсш И и 12 изгибаются в том же направлении на ту же суммарную величину, причем блок 20 выполнен так, что в этом положении подведенные от датчиков 13 электрические сигналы прекращаются и прибор 21 снова показывает нуль. Если же один из измерительных механизмйэ, например механизм 8 (см. фиг. 3), попадает в просадку, например, в стыке рельоов, то через рычаг 10 и тяги 15 изгибается вертикальное плечо рьиага 11,в то время как вертикальное плечо рычага 12 остается прямым. Соответствующий изгибу оддюго вертикального плеча электрический сигнал вызывает отклонение стрелки прибора 21 через блок 20. Если средний механизм 7 попадает в ту же пpocaдкv (см. фиг, 4)/ то вертикальные плечи рычагов И А 11 изгибангтся в противоположных направлениях на ту же суммарную величину; в блоке 20 оба сигнала складываются и прибор 21 показывает удвоенное значение по фавнению с регистращ1ей результатов измерений устройством при проходе просадки передней измерительной тележкой. Благодаря тому, что то же отклонение, измеренное внешними или средним измерительными механизмами, регистрируется в разных величинах, вьгчисляются значения, принятые указательным 17 или регистрирующим 18 устройствами. Кроме того, для определения упругих и остаточных деформаций рельсов можно использовать разные показания разных измерительных механизмов. Для этого нагружается один федний измерительный механизм так, что от этого механизма, но не от двух других, воспринимаются также упругие деформации рельса. Нагрузка может осуществляться тем, что средний измерительный механизм выполнен, например, в виде холодной тележки, связанной с рамой вагона. Преимущество устройства заключается в том, что при установке его на вьшравочной машине, например стыкоподъемной, обеспечивается контроль за вьшравкой, а тензометрические датчики связаны с приводом и используются для автоматического управления рьиажно-подъемными рабочими органами, при этом подъем и опускание рабочих органов осуществляется автоматически, без контроля обслуживающим персоналом. Формула изобретения Передвижное устройство для определения поло 1кния рельсовой нити в вертикальной плоскости, содержащее раму, опирающуюся на ходовые тележки, три подвижных в вертикальной плоскости контактных органа, представленных ненагруженными измерительными тележзсами, средняя из которых размещена между ходовыми тележками, а две концевые - с внешних сторон ходовых тележек, тензометрический датчик, распож)женный в вфтикальной щ)одольной плоское™, и шаршфно-соединенный с рамой угловой рычаг, горизонтальное плечо которого направлено в сторону конца рамы и связано с одной из концевых измерительных тележек, указательный и регистрирующий приборы, о тличающееся тем, что, с целью повышения точности измерений, устройство снабжено вторым теизометртескЬм датчиком и тремя расположенными также в вертикальной продольной плоское закреш1енны14И на раме углов ымк рычагами.,ви и к-о10|1ых горизонтальными плечами, направiifii и i.iMM HHBCJ ируг , присоединены к средiifii и .М-рителряои гележке и на вертикальных плечах вмкилнекных упругими, несут датчики, а гр.-1П11 pMijiii горизонтальным плечом, направлен- 5 1U.I.M и .. (орону конца рамы, связан со второй копией.) измерительной тележкой, при этом верги5
1Ъ 17
19 19 Ц.
,I/
I/ кадьные плечи рычагов через один соединены друг с другом посредством тяг. Источники информации, принятые во внимание при экспертизе: 1. Патент СССР №406373, М., Кл. Е 01 В 35/06 02.07.70.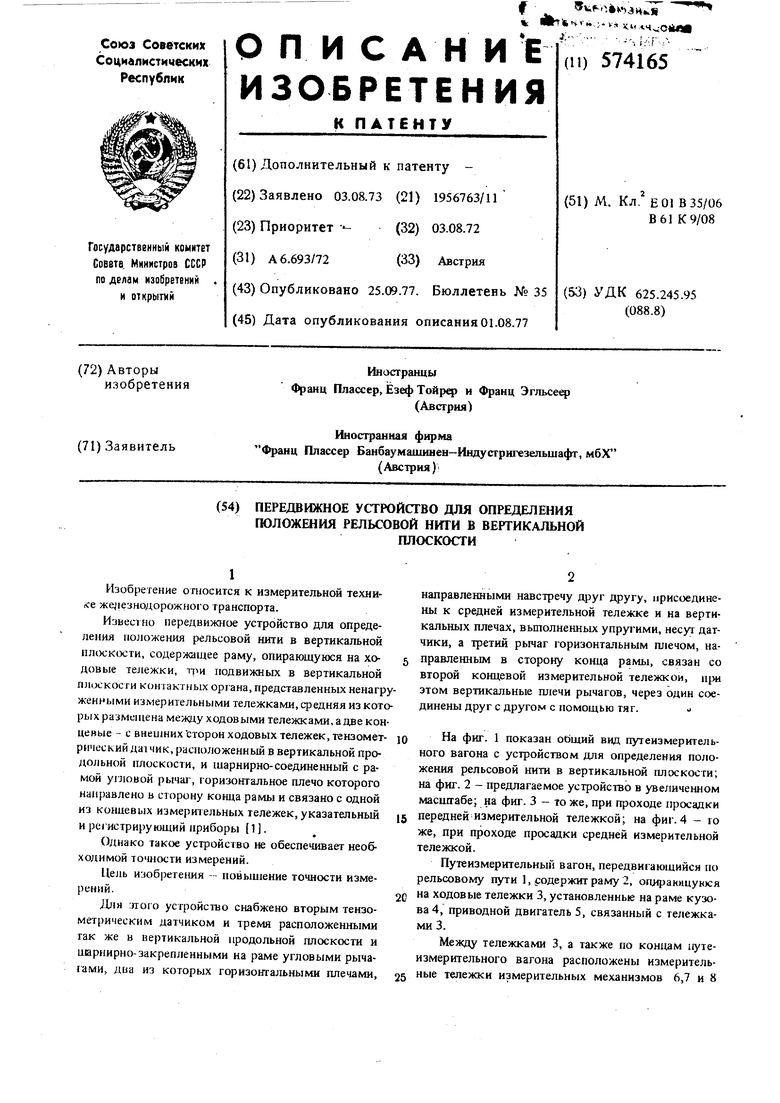
Ю 8
