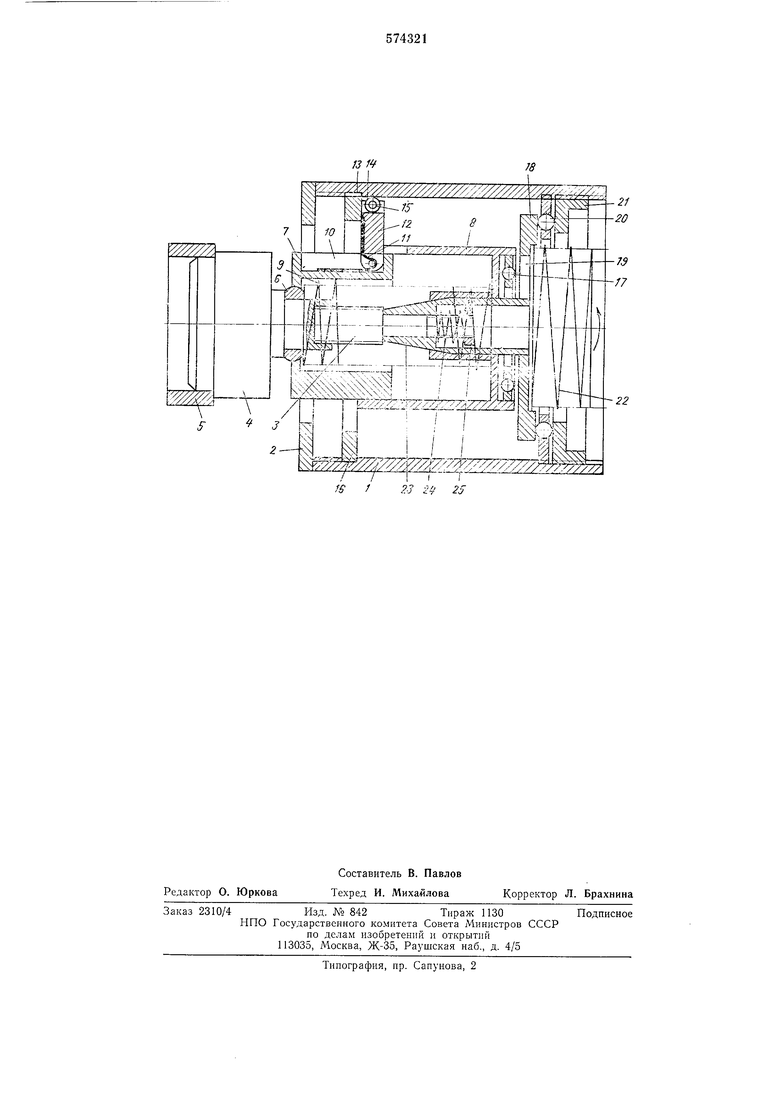
пендикулярной к его оси и связана через дополнительную опору, выполненную в виде нлаваюндего диска 18 с корпусом 1. Диск 18 снабжен радиальным назом 19, в котором размещен шток 3, и опирается на шариковую онору 20, положение которой определено кольцом 21 и связанным с пршюдом гибким валом, например иружиной 22.
Шариковая опора 20 позволяет перемещаться диску 18 на величину компенсации ошибки позиционирования в плоскости, перпендикулярной к его оси.
Для обеспечения осевого перемещения штока 3 имеется втулка 23, поджатая пружиной 24, ход которой регулируется гайкой 25.
Устройство компенсации ошибок работает следующим образом.
Одиа из собираемых деталей 5, закреплениая в схватах 4, перемещается па сборочную позицию при движении корпуса 1 влево.
Если ось детали 5 не совпадает с осью другой собираемой детали, деталь 5 упирается своим торцом в торец второй детали, шток 3 иод действием сил сопротивления движется вправо во втулке 23, сжимая пру}кипу 9 и вводя часть 7 телескопического цилиндра в часть 8.
П)и этом кулачки 12, упираясь в часть 8 телескопического цилиндра, поворачиваются вокруг осей 11, преодолевая сопротивленпе пружин 13, и прячутся в пазах 10, расфиксируя шток 3 относительно корпуса 1.
Наличие па концах кулачков 12 роликов 14 позволяет произвести расфиксацию с малым усилием.
При сжатии пружины 9 срабатывает конечный выключатель (не показан), размещенный в телескопическом цилиндре, и подается команда па вращение гибкого вала - пружины 22 и диска 18 против часовой стрелки.
Как только радиальный паз 19 совпадает е плоскостью, в которой действует сила сопротивления, возникаюил,ая в точках контакта собираемых деталей, шток 3 займет наклониое положение относительно корпуса 1, повернувшись в щарнире 6.
Конец щтока 3 вместе с втулкой 23 перемещается по радиальному пазу 19, увлекая
за собой телескоппческий цилиндр, который перемещается в ту же сторону благодаря щариковои опоре 17.
Дальнейщее вращение гибкого вала 22 приводит к появлению трех точек контакта собираемых деталей и обкатке детали 5 по кромке сопрягаемого отверстия.
При этом иружина 9 стремится возвратиться, обеспечивая необходимое сборочное усилие.
В результате описапного процесса происходит сборка деталей, причем шток 3 во втулке 23 перемещается по радиальному пазу 19 диска 18 на величину компепсации ощибки
Наличие движения обкатки позволяет заменить трение скольжения в точках контакта трением качения, что повышает надежность сборки, исключая явление заклинивания и залипания между сопрягаемыми поверхиостями.
После осуществлеиия сборки схваты 4 освобождают деталь 5. Затем происходит отвод в исходное положение (вправо).
При этом части 7 и 8 телескопического цилиндра расходятся под действием пружины 9, кулачки 12 иоворачиваются на осях И под действием иружины 13 и упираются торцовой поверхностью в кольцо 16, а роликами 14 - во внутреннюю поверхность корпуса 1, надежно фпксируют щток 3 относительно корпуса 1, после чего возможно повторение цикла.
Формула изобретения
Устройство компенсации ошибок, например, сборочного манииулятора, содержащее корцус и иодпружипенную втулку, размещенную на штоке, отличающееся тем, что, с целью повыщения надежности устройства в работе и упрощения его конструкции, втулка выполнена в виде телесконического цилиндра, одна часть которого снабжена поворотными кулачками, а другая - опорой, например щариковой, связанной через дополнительную опору в виде плавающего диска с радиальным пазом, с корпусом, а шток установлен в пазу диска.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для сборки деталей типа вал-втулка | 1985 |
|
SU1288014A1 |
| Устройство для сборки деталей | 1975 |
|
SU524665A1 |
| Станок для сборки деталей и клепки | 1976 |
|
SU576153A1 |
| Устройство для сборки шарнирного соединения секаторов | 1983 |
|
SU1271702A1 |
| АВТОМАТ ДЛЯ СБОРКИ УЗЛОВ | 1991 |
|
RU2022752C1 |
| Устройство для сборки деталей | 1981 |
|
SU988520A1 |
| Устройство для сборки цилиндрических деталей | 1987 |
|
SU1444172A1 |
| Устройство для сборки деталей типа вал-втулка | 1974 |
|
SU516499A1 |
| Станок для сборки узлов | 1977 |
|
SU677801A1 |
| Манипулятор | 1986 |
|
SU1430257A1 |