Изобретение относнтся к нодьемпо-транснортным ерсдствам н касается конструирования телесконнческих за.хватов подвижного погрузчика.
известен телееконнческий захХват подвижного ногрузчика, в котором ПОДВИЖНЫЕ стол установлен на раме ногрузчика и кинематически связан е приводом ij.
недостаток указанного захвата заключается в смежности конструкции н неудобстве в эксплуатации.
известен также телескоиический захват передвижного ногрузчика, содержащий направляющие, смонтированные на раме погрузчика, несущую Оалку с грузовым столом, ооорудованным катками с несущей рейкой, и механизм нонеречного нередвпження стола, взаимодействующий с ведущими зубчатыми колесами иривода .
Иедостаткамн такого захвата являются большие габарнтв и низкая производительность.
Цель изобретения - уменьшение габаритов захвата и повышенпе производительности.
Для этого иесущая балка выполнена е Тобразнымн боковыми ребрами н продольным пазом, а механизм нонеречного перемещения ;тола содержит крайние н среднее зубчатые колеса, ненодвнжную и нодвил ную зубчатые рейки, при этом неиодвижная зубчатая рейка
2
установлена в 1родольном пазу несущей балки, а нодвнжная - установлена на столе и связана е крайнн.ми зубчатыми колесами, расиоложеннымн на несущей ба,1ке, причем каждое крайнее зубчатое колесо взаимодействует е неиодвнжно зубчатой рейкон и зуОчатой рейкой стола.
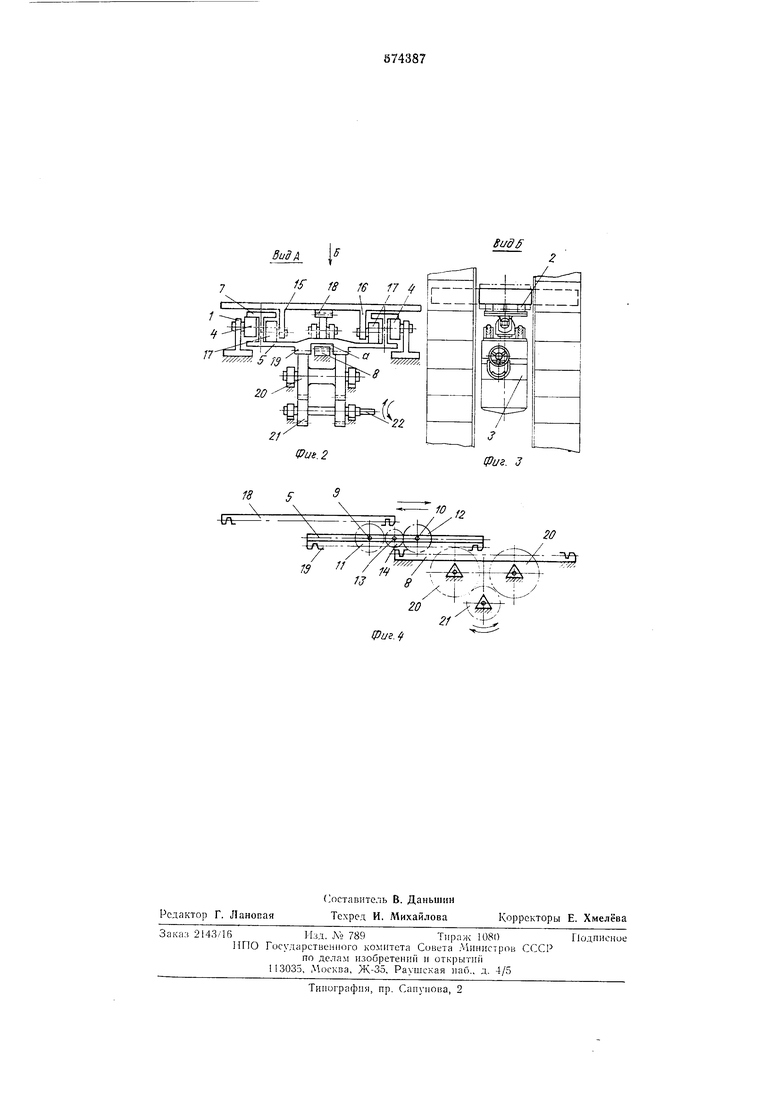
ria фнг. i схематически изображен нредлагасмый захват в днометрин; на фнг. 2 - то же, вид но стрелке А; на фиг. 3 - то же, вид по стрелке D; на фиг. 4 - кинематическая ехема захвата.
Предлагаемый захват содержит направляющие 1, расио.юженные на раме 2 ногрузчика 3. На нанрав.1яющи. 1 консольно установлены каткн 4. 1 1ежду направляющими 1 ycTaiiOBJicna несущая балка 5 с Т-образнымн ооковымн ребрами 6. Каждое нз ребер D вынолнено с горнзонтальными иолками 7.
b средней части балки 5 имеется продольный наз а, в котором размещена кенодвижно закрепленная зубчатая рейка 8, прикреплениая к раме 2. На балке 5 на осях 9 н 10 установлены зубчатые колеса И н 12, а на оси 13 - зубчатое колесо 14. На несущей балке 5 с возможностью нередвижения установлен грузовой стол 15 захвата со стойками 16 и катками 17. К столу 15 нрнкреплена зубчатая рейка 18. К балке 5 нрикреплены зубчатые рейки 19. На ряме 2 ногрузчика установлены промежуточные зубчатые колеса 20, взаимодействующие с велаущими зубчатыми колесами 21 вала 22 привода (на чертежах не показан).
Колеса 11 и 12 взаимодействуют с рейками 8 и 18 и колесол 14, а колеса 20-с рейками 19 балки 5 и колесами 21 вала 22 нривода. На столе 15 помещен груз (на чертеже не показан).
Захват работает следующим образом.
Для поперечного перемещения груза включается привод и вал 22 приводится во вращение. При вращении вала 22 зубчатые колеса 21 входят Б зацепление с зубчатыми колесами 20, а последние с рейками 19, при этом несущая балка 5 перемещается поперечно по отнощеНИЮ к погрузчику 3 (вправо или влево в зависимости от направления вращения вала). При перемещении балки 5 колеса 11 и 12 обкатываются по неподвижной рейке 8 и подвижной рейке 18, благодаря чему поперечно выдвпгается грузовой стол 15, при этом ход грузового стола 15 равен удвоенному ходу балки 6.
Формула изобретения
Телесконический захват передвижного погрузчика, содер кащий направляющие, смонтированные на раме погрузчика, несущую балку с грузовым столом, оборудованным катками с несущей рейкой, и механизм поперечного нередвижения стола, взаимодействуюихий с ведущими зубчатыми колесами нривода, отличающийся тем, что, с целью уменьщения габаритов захвата и повыщения производительности, несущая балка выполнена с Т-образными боковыми ребрами и
продольным пазом, а механизм поперечного перемещения стола содержит крайние и среднее зубчатые колеса, пеподвижпую и подвижную зубчатые рейки, при этом неподвижная зубчатая рейка установлена в нродольном
пазу несущей балки, а подвижная - установлена на столе и связана с крайними зубчатыми колесами, распо.южеппыми на несущей балке, причем каждое крайнее зубчатое колесо взаимодействует с пеподвижной зубчатой рейкой и зубчатой рейкой стола.
Псточпики информации, Припятью во внимание при экспертизе
1. Патепт США Л1 3175722, кл. 214-731, 1965.
2. Патент США № 3283924, кл. 214-16.4, 1966.

| название | год | авторы | номер документа |
|---|---|---|---|
| Грузовое устройство к вилочному погрузчику для транспортировки и складирования штучных грузов | 1976 |
|
SU586110A1 |
| Передвижной вилочный погрузчик | 1960 |
|
SU137459A1 |
| ПРОМЫШЛЕННЫЙ ПОГРУЗЧИК | 1972 |
|
SU339494A1 |
| Устройство для разгрузки и загрузки стеллажей штучными грузами | 1974 |
|
SU547377A1 |
| Подъемный стол | 2015 |
|
RU2612116C2 |
| Устройство для погрузки штучных грузов в вагон | 1981 |
|
SU1024401A1 |
| Автоматизированный комплекс для штамповки крупногабаритных деталей | 1985 |
|
SU1324725A1 |
| Устройство для загрузки и разгрузки многоярусных стеллажей склада | 1972 |
|
SU439452A1 |
| Устройство для захвата листового груза | 1988 |
|
SU1623941A1 |
| Подъемник | 1990 |
|
SU1801941A1 |
// / / I / / /ff /
udJ. I
//
15
Виде
///- / I A
74
V////,
n , 77ГТ
I
t
20
