(54) ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ КОНТЕЙНЕРОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство для контейнеров | 1980 |
|
SU889500A2 |
| КОНТЕЙНЕРОВОЗ«Г- ('" | 1972 |
|
SU357129A1 |
| В П Т Б | 1973 |
|
SU395790A1 |
| Захватное устройство портального контейнеровоза | 1977 |
|
SU655644A1 |
| Устройство для программного управления отбором проб воздушной среды в воздухоприемных устройствах силовых установок | 1984 |
|
SU1252756A1 |
| Система рулевого управления автогрейдера | 1988 |
|
SU1639994A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УЧЕТА | 1971 |
|
SU289010A1 |
| Устройство для управления загрузкой самоходной уборочной машины | 1986 |
|
SU1384254A1 |
| ПРИБОР ДЛЯ ОЦЕНКИ РОВНОСТИ ДОРОЖНЫХ ПОКРЫТИЙ | 1997 |
|
RU2136805C1 |
| Гидропривод | 1976 |
|
SU765523A1 |
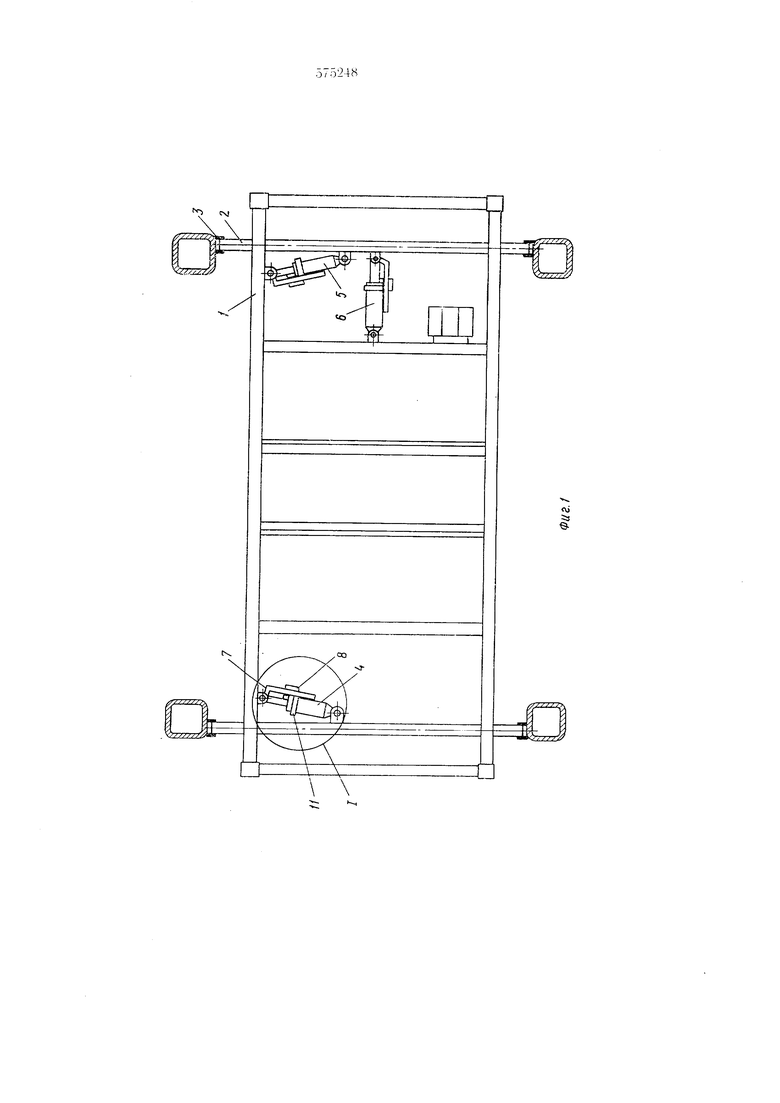
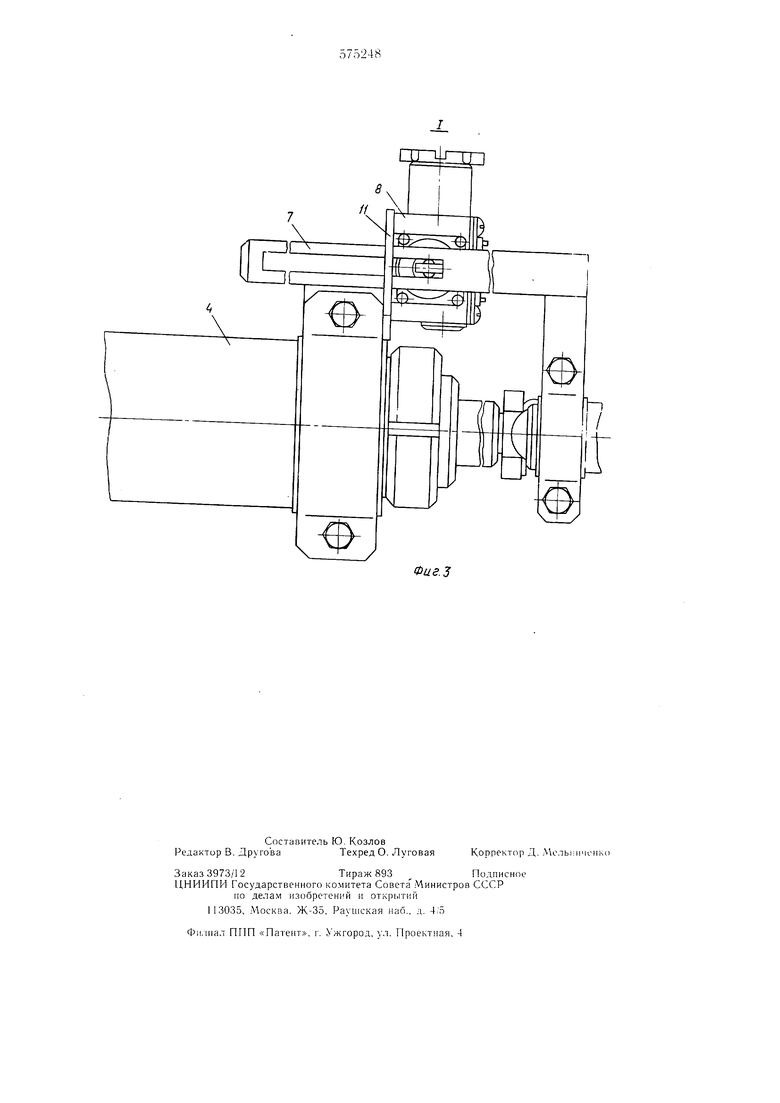
Изобретение относится к грузо ахватн 1. устройствам, в частности монтируемых на антоконтейнеровозах и с/Пжаиш.х для захвгпа контейнеров. Известны захватные устройства для к.,;;тейнеров, монтнрхемые на автоконтейнеро .;..-. ;: и содержаН1,ие несущую раму с HOBOpoTiiiii:.:; захватными элементами I. Однако известные устройства не имеют присиособлений для ориентанин устройства относительно автоконтейнеровоза. Известно захватное устройство для контейнеров, содержан ее несущую раму с поворотными захватными эле.ментами и нриснособление тля ориентации относительно контейиера 2. Такое устройство не .может быть испо.чьзовано на автоконтейнеровозе. Известно захватное устройство для контейнеров, монтируе.мое на автоконтейнеровозе, содержащее несунтую с поворотными захватны.ми эле.мента.ми, установленную на нонеречных балках, связанных с автоконтейнеровозом, и соединенную с ними силовы.П гидронилиндрами, но.юсти которых соединены с реверс ивны.ми гидрозолотника.ми, снабжен мы.ми электромагнитами, обмотки которых включены в электрическую цепь управления с контактными .чьонкалп ;i нии 3j. 1.;нссГ|{ос xcTjWiicriin не опоспечивает а)Т(:мат11ческ:)Ч1 )а;иеп;1Я - .4iioe (Tpai C iopT:ioo) iio/o/Keiiiit iKic.if контейнера. Lle.ib 1 ЗобпстС Л Я -- ;iiVi4);;iTiKKiuii if vxopeHiie iipoiiecc;; хсгапоик.и рамы с i-лч- . в трансиортмос го, шжсмпе. Д,;я этого каж;1ь;й г; Д 1онил1и др снабжен взаю.юдейст в чо:н1Г 1И между 1.чм) и п тевым вьпчлючателел. конГЛкты которого через 1;ерсключа;о:ние днодь и ciHiiBCic гнуюпще об. электрома:1П1Тг.1в .чагь; с источщ ко.м . При STCJM рейка iibnio.iiiCFia с прорезью на по. се рабочей д.1а111.-.1. На ijiiir. 1 i 3o6;ia Ke:io пед.1агае ;ое устройство. o6ijuin iiii;,: lia ipiir. 2 - з. ект11ическая схема yiijiaB.iciinH несхчцей рамоп; на фиг. 3 -- хзел 1 фиг. 1. Захватное , стпойсгво содерж ;т раму Е л-ста11() на попереч ;,:х 6a.iках 2, которые персмепинотся п luinpaB.iHioKUix колонн 3 автоко|1тейиеоовоза {па чертеже ае ловыми lTlДi)oп,n.ll;nдPa :п 4 для 1ПХ)до,1Ьнои и поперечной opiieirraiiini paNiiii СП-оспте.тыю автоко| теЙ1СП(/воза.
На штоке каждого нз гидроцнлиндров закреплена рейка 7, а па корпусе гидроцилир дра путевей В1 1ключатс:ль 8 е контакта.ми 9 и iO.
Для совме:це 1ия оси рамы 1 и продольной оси контейнеровоза рейка 7 закреплена на и;токе гидроцилиндра е возможностью продольного перемеп1ения и на половину длины выиолiiOHa с в 1резом, в который входит ролик выключателя 8. При этом длина прорези 6o.ibiiie рабочего хода штока гидр()и.и,11П1дра. Путевой выключатель снабжен кронн1тейном 1, который служит наиравляюшей рейки 7.
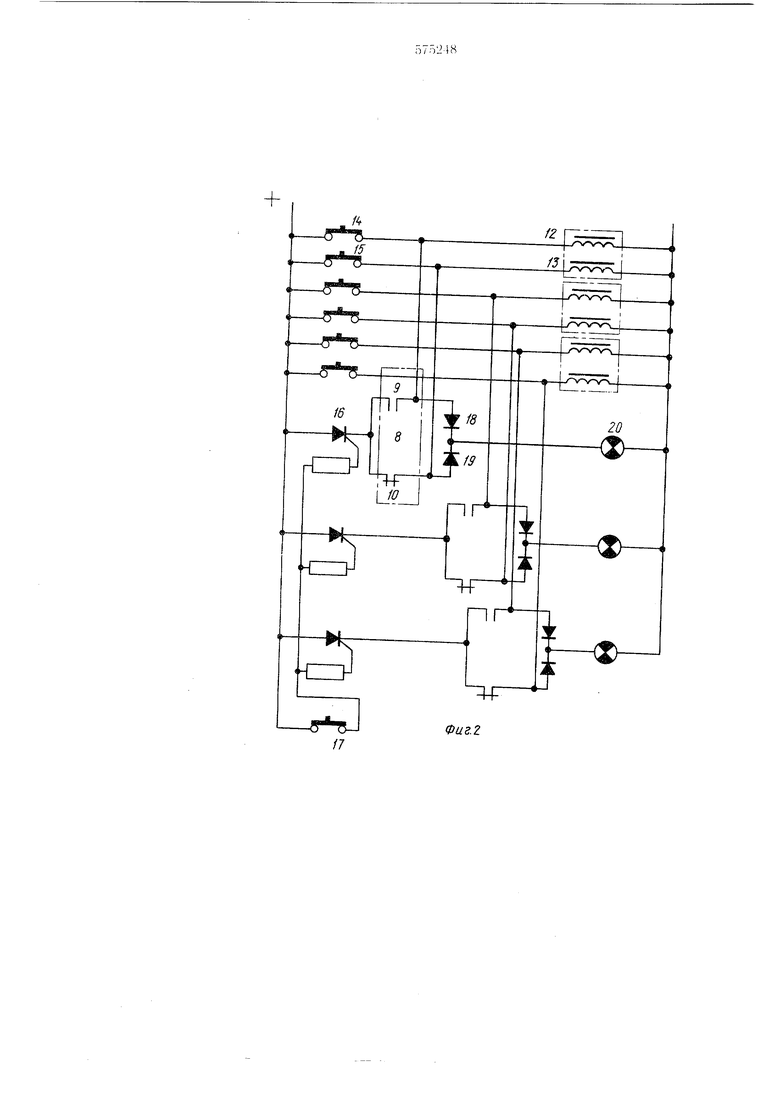
Электромагниты 12 и 13 управления peiicpгивнЕзПч гидроцилиндром (иа чертеже ие показан) через кнопочные выключатели 14, 15 и, одповременно, через контакты 9 и 10 выключаТС.1Я 8 и переключающий диод 16 подключены к ИСТОЧ1П-1КУ питания.
Контакты 9 и 10 подключены к электромагнитам 12 и 13 таким образом, что при прохождении рейкой 7 среднего положения замыкается тот контакт, который коммутирует цепь питания электромагнита выдаюшего команду на обратное движение рейки, а следовательно, и штока гидроцилиндра. Диод 16 получает командный имнульс на включение от KiiOHKH автоматического управления 17. К и,еin-t питания электромагнитов 12 и 13 через диоды 18 и 19 подключена контрольная лампа 20.
Нацеливание рамы 1 па контейнер проводят в)учную, кнопочнь 1 1 управлением силовыми гидроцилиндрами 4-6.
При нажатии, иапри.мер, иа выключатель 15 питание поступает на электромагнит 13, которьп подает комаиду на движение гидропилппдра 4 вправо. Рейка 7, неремени ясь вместе со штоком гндроцилиндра вправо относительно выключателя 8, перек.лючает его когггакты в момент прохождения роликом набегающего края прорези, что соответствует средпе.му положению рабочей длины рейки. При этом замыкается коитакт 9 и размыкается контакт 10.
После выиолнепия операции захвата и иодъ ем а контейнера раму с контейнером необходимо выставить в транспортное ноложение. Для этого оператор кратковременно нажимает и отпускает кнопку автоматического управлении 17. Электрический импульс поступает иа /1И(|Д 16, п диод открывается. При этом иитание иостуиает через замкнутый контакт 9 .почателя 8 па электромагнит 12.Дтектромагпиг 12 срабатывает и тем самьгм выдает в
гидросхсму комаиду на движение ги,н роци.1иидра 4 в обратную сторону, т.е. в.лево. Одновремегпю загорается ла.миа 20.
Рейка 7, нере.мешаясь вместе со штоком гидроци.липдра влево относительно вьп ;п чателя 8 переключает его контакты, размыкая контакт 9, и замыкает контакт 10. При это.м коитакт 9 размыкается до замыкания контакта 10, цепь питания прерывается, вс.ледствие чего диод 16 становится неироводимым. Прекращается подача питания на электро.магнит 12 и шток гидроцилиндра 4 остаиав.ливаетея, ламиа 20 гаснет.
А ;1алогично работает система управления гидроцилиидра.ми 5 и 6. В транспортно.м положении рамы 1 э.чектро.магниты отключены, и контрольные лампы не горят.
Формула изобретения
Источники информации, .чринятые ко внимание ири экспертизе:
rp-ijj-rri
