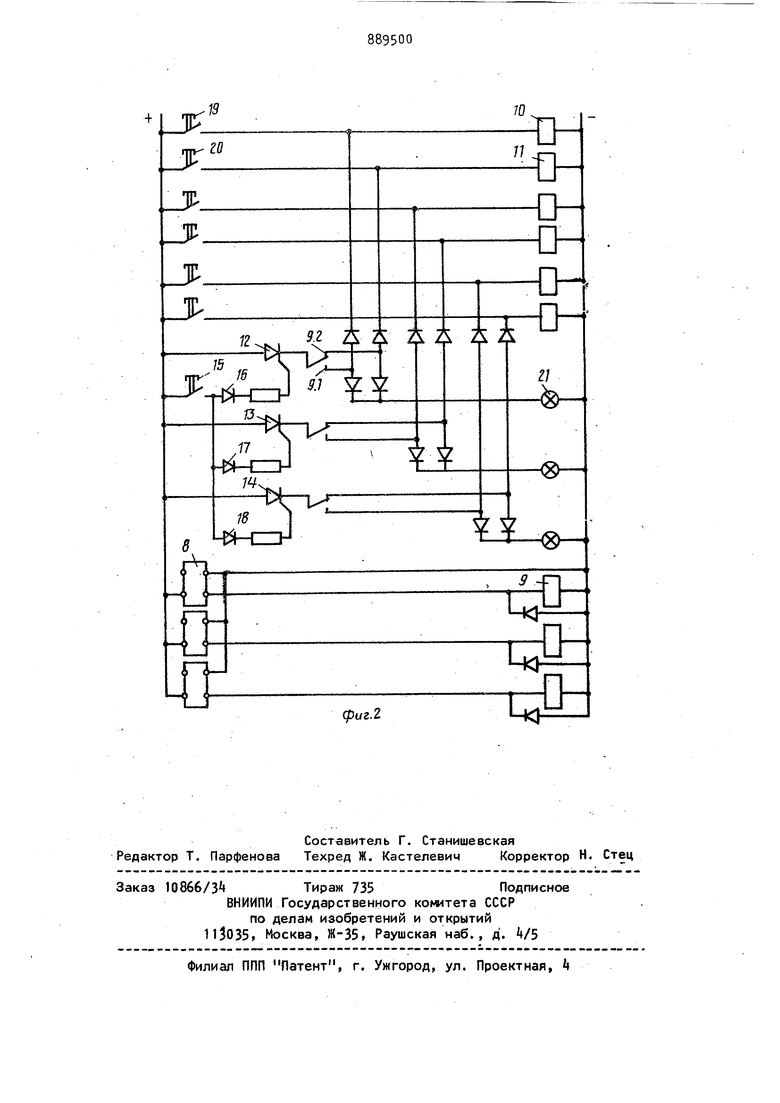
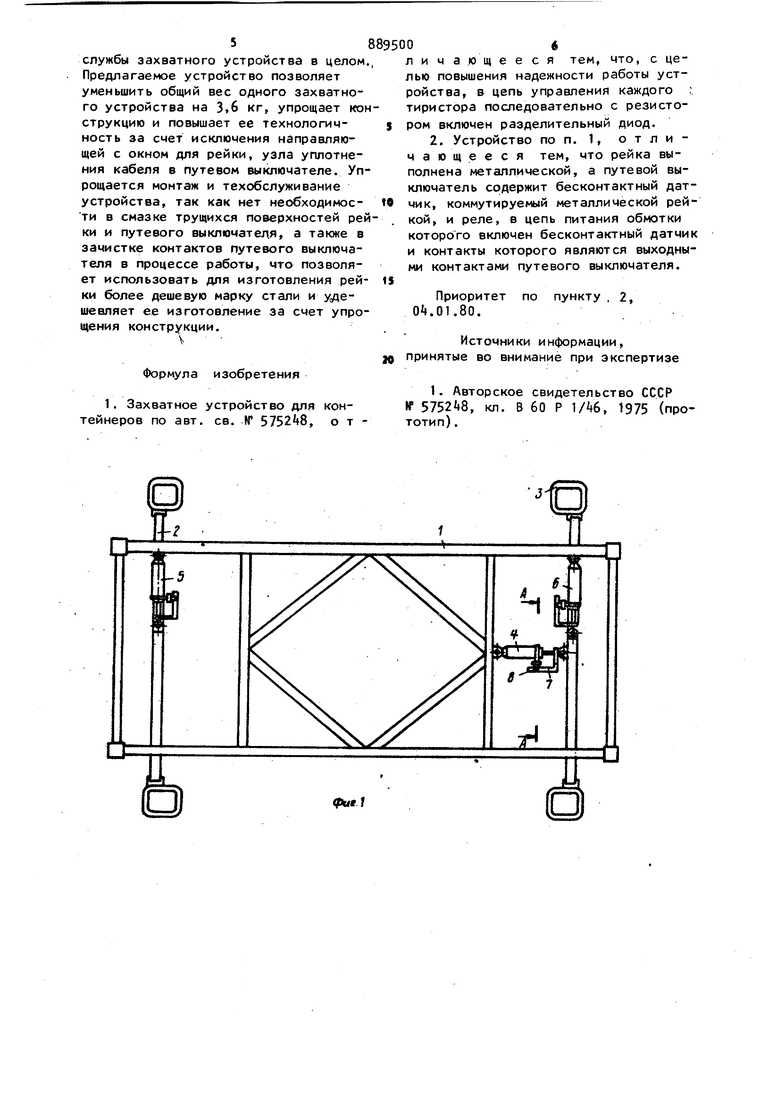
Изобретение относится к грузозахватным устройствам, в частности, монтируемым на автоконтейнеровозах и предназначенным для выполнения погрузочно-разгрузочных работ с контейнерами. По основному авт. св. ff 5752W известно устройство, содержащее несущую раму с поворотными захватными элементами, установленную на поперечных балках, связанных с автокон-тейнероводом и соединенную с ними силовыми гидроцилиндрами, полости которых соединены с реверсивными гидрозолотниками, снабженными электромагнитами, обмотки которых включены в электричес кую цепь управления с контактными кнопками и связаны с источником питания, причем каждый цилиндр снабжен взаимодействующими между собой рейкой и путевым выключателем, контакты которого через переключающие диоды и соответствующие обмотки электромагнитов связаны с источником питания ПЗ. Недостатком известного устройства является самовключение тиристоров в цепях управления уже отработавших гидроцилиндров через цепи включенных тиристоров, что вызывает ненужные возвратно-поступательные движе- : ния несущей рамы относительно ее транспортного положения. Кроме того, в известном устройстве рейка и путевой выключатель находятся в непосредственном контакте, что приводит к износу трущейся пары, поломке при заклинивании или обледенении, и, в конечном счете, к снижению надежности устройства в целом. Цель изобретения - повышение надежности работы устройства. Поставленная цель достигается тем что в цепь управления каждого тиристора последовательно с резистором включен разделительный диод, причем реЛка выполнена металлической, а путевой «включатель содержит бесконтактный датчик, коммутируемый металличес3кой рейкой, и реле, в цепь питания о мотки которого включен бесконтактный датчик и контакты которого являются выходными контактами путевого выключателя. На фиг. 1 представлено захватное устройство цл/я контейнеров, общий вид; на фиг./2 - электрическая схема управления несущей рамой. Захватное устройство содержит несущую раму 1,- установленную на поперечных балках 2, которые перемещакзтся в направляющих колонн 3 автоконтейнеровоза. Рама 1 соединена с балками 2 силовыми гидроцилиндрами k-6 для продольной и поперечной ориентации рамы относительно осей автоконтей неровоза. На штоке каждого из гидроцилиндров закреплена металлическая рейка 7. а на корпусе гидроцилиндра бесконтактный датчик 8. Рейка 7 входит в рабочий зазор датчика 8, запиты вая при этом катушку реле 9 (фит. 2) Контакты 9.1 .и 9-2 реле соединяют со ответствующие электромагниты 10 и П гидрозолотников (не показаны) через тиристор 12 с источником питания. Кон такты реле 9 подключены к электрог магнитам 10 и 11 таким образом, что при входе или выходе конца рейки 7 из рабочего зазора датчика 8 замыкается тот контакт реле, который комму тирует цепь питания электромагнита,. подающего команду на обратное Движе ние рейки, а, следовательно, и штока гидроцилиндра k. Тиристоры 13 и 1 подают питание на электромагниты гид розолотников управления гидроцилинд рами 5 и 6. Тиристоры получают команд ный импульс на включение от кнопки 1 управления. В цепь управления каждого тиристора введены разделительные диоды соответственно 16-18, которые предохраняют отключенные тиристоры от подачи на них ложного командного сигнала со стороны функционирующих т ристоров. Электромагниты 10 и 11 так же соединены с источником питания через кнопки 19 и 20 ручного управле ния, а к цепи питания электромагнитов подключена контрольная лампа 21. Нацеливание рамы 1 на контейнер проводят вручную кнопочным управлением силовыми гидроцилиндрами 4-6. При нажатии, например, на кнопку 20 питание поступает на электромагнит 11, который подает команду на движение штока гидроцилиндра 4 влево. Што гидроцилиндра k перемещает несущую 0 раму 1 на поперечных балках 2. Рейка 7 перемещается вместе со штоком гидроцилиндра влево относительно датчика 8. При входе рейки 7 в рабочий зазор датчика запитывается катушка реле 9 контакт 9.2 которого размыкается, а контакт 9.1 замыкается. После выполнения операции захвата и подъема контейнера несущую раму 1 н еобходимо поставить в транспортное положение. Для этого опер1атор кратковременно нажимает и отпускает кнопку 15 автоматического управления. Электрический импульс поступает через разделяющий диод 16 на тиристор 12 и последний открывается. При этом питание поступает через замкнутый контакт 9.1 реле 9 на электромагнит 10. Электромагнит 10 срабатывает и тем самым выдает в гидросхему команду на движение штока гидроцилиндра 4 в обратную сторону, т.е. вправо. Одновременно загорается лампа 21. Рейка 7, перемещаясь вместе со штоком гидроцилиндра вправо относительно датчика 8, выходит из его рабочего зазора. При этом обесточивается катушка реле 9 которое размыкает контакт 9.1 и замыкает контакт 9.2. Контакт 9-1 размыкается до замыкания контакта 9-2, вследствие чего тиристор.12 становится непроводимым. Прекращается подача питания на электромагнит ,10, и шток гидроцилиндра останавливается, лампа 21 гаснет. Аналогично работает система управления гидроцилиндрами 5 и 6. При этом штоки гидроцилиндров k-6 проходят неодинаковые расстояния, а, следовательно, отключение тиристоров 12-14, происходит неодновременно. Например, тиристор 12 отключен, а через тиристоры 15 и 16 продолжает поступать питание на электромагниты гидрозолотников управления гидроцилиидрами 5 и 6. При этом разделительный диод 16 надежно предохраняет тиристор 12 от поступления на него ложного командного сигнала со стороны работающих тиристоров 13 и 14. Аналогично разделительные диоды 17 и 18 предохраняют тиристоры 13 и 14 от поступления ложного сигнала. Это исключает ненужные возвратнопоступательные движения штоков гидроцилиндров относительно точки транспортногоположения, что повышает надежность работы и увеличивает срок
службы захватного устройства в целом., Предлагаемое устройство позволяет уменьшить общий вес одного захватного устройства на 3,6 кг, упрощает конструкцию и повышает ее технологичность за счет исключения направляющей с окном для рейки, узла уплотнения кабеля в путевом выключателе. Упрощается монтаж и техобслуживание устройства, так как нет необходимости в смазке трущихся поверхностей рейки и путевого выключателя, а также в зачистке контактов путевого выключателя в процессе работы, что позволяет использовать для изготовления рейки более дешевую марку стали и УзДешевляет ее изготовление за счет упрощения конструкции. V
Формула изобретения
1. Захватное устройство для контейнеров по авт. св. W , о т лича.ющееся тем, что, с целью повышения надежности работы устройства, в цепь управления каждого ; тиристора последовательно с резистором включен разделительный диод.
2, Устройство по п. 1, отличающееся тем, что рейка выполнена металлической, а путевой выключатель содержит бесконтактный датчик, коммутируемый металлической рейкой, и реле, в цепь питания обмотки которого включен бесконтактный датчик и контакты которого являются выходными контактами путевого выключателя.
Приоритет
по пункту , 2, О .01.80.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР К 5752 8, кл. В 60 Р , 1975 (прототип) .
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство для контейнеров | 1975 |
|
SU575248A1 |
| Установка для изготовления петель на концах каната | 1974 |
|
SU524875A1 |
| Устройство для программного управления отбором проб воздушной среды в воздухоприемных устройствах силовых установок | 1984 |
|
SU1252756A1 |
| ГИДРОПРИВОД ОПРОКИДЫВАЮЩЕГО МЕХАНИЗМА ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2605802C2 |
| Устройство для переноса трубных заготовок и его система управления | 1982 |
|
SU1103925A1 |
| Устройство для разгрузки сыпучего материала | 1989 |
|
SU1676966A1 |
| ГИДРОПРИВОД ОПРОКИДЫВАЮЩЕГО МЕХАНИЗМА ТРАНСПОРТНОГО СРЕДСТВА | 1990 |
|
RU2049690C1 |
| Костылезапрессовщик | 1984 |
|
SU1216269A1 |
| Устройство для пуска реверсивного электродвигателя | 1987 |
|
SU1443108A1 |
| Правильный пресс | 1978 |
|
SU770602A1 |