20
30
Изобретение относится к транспортым средствам, преимущественно i к системам управления поворотом шарнирно сочлененных автогрейдеров.
Цель изобретения - повышение прозводительности автогрейдера путем беспечения автоматизации системы правления шарнирно-сочлененной раой.
На фиг.1 изображена электрогидрав- 25 ическая схема автогрейдера с передними управляемыми колесами и шарнирно сочлененной рамой; на фиг. 2 зел I на фиг.1«
Система рулевого управления автогрейдера 1, имеющего шарнирно сочлененную раму 2 и управляемые колеса 3, содержит управлейне поворотом колес 3, куда входит исполнительный гидроцнлиндр 4, связанный через трапецию 5 с управляемыми- колесами 3, гидронасос 6, предохранительный клапан 7, гидробак 8 и гидравлический рулевой механизм 9.
Система складывания передней и задней секций 10 и 11 шарнирно сочлененной рамы 2 относительно арнира 12 содержит гидроцилиндры 13, приводимые от гидронасоса 14, предохранительный клапан 15, элек- троуправляемый гидрораспределитель 16 с электромагнитами 17 и 18
Система рулевого управления авто- грейдера 1 для автоматизации выставения и поддержания шарнирносочлененной рамы 2 в положении прямолинейного движения в соответствии с электросхемой снабжена тремя нормально открытыми выключателями 19-21, установленными на одной из секций рамы по окружности относительно шарнира 12, а на другой секции рамы по аналогичным окружностям установлены контакты 22 и 23 указанных выключателей, Вы35
40
45
50
55
0
0
5
5
0
5
0
5
ключатели 19 или 20 установлены относительно контакта 22 с обеспечением между .ними углового зазора 0 1°, что соответствует поперечному смещению передних колес относительно задних 100 мм с учетом параметров автогрейдера. Выключатель 21 и его контакт 23 установлены с обеспечением опережения включения выключателя 19 или 20, чем выключение выключателя 21, т.е. угловое расстояние Qz 01 , что необходимо для работы системы в автоматическом режиме.
Для управления складыванием рамы 2 установлен трехпозиционный переключатель 24 с принудительным возвратом его в нейтральную позицию, в которой источник 25 питания может быть связан через нормально открытый выключатель 21 (в нейтрали закрытый), диод 26, реле 27, его контакты 28 и 29, диод 30 и нормально открытые контакты 19 или 20 с электромагнитами 3 7 или 18 гидрораспределителя 1 б управления складыванием рамы - автоматическое управление.
Для ручного управления складыванием рамы используется трехпозиционный переключатель 24 в двух других его позициях. При этом источник 25 питания напрямую связан с электромагнитами 17 или 18,
Для автоматического возврата сложенной рамы 2 используется выключатель
31.Для указания прямого положения секций рамы 2 установлен сигнализатор
32,а для указания направления складывания - сигнализаторы 33 и 34,
Система рулевого управления автогрейдера обеспечивает поворот авто- грейдера 1 раздельно или совместно соответственно поворотом управляемых колес и складыванием секций рамы 4.
51639994
нейтральном положения переключа-
в п с ч
теля 24 обеспечивается автоматическое поддержание секций рамы 2 в положении прямолинейного движения. При прямолинейном движении в транспорте, если, например, произойдет перемещение штоков гидроцилиндров 13 складывания рамы 2 при действии внешних сил, относительный поворот секций 10 и 11 рамы 2 возможен только в пределах допустимого угла 9, , далее замыкается контактом 22 выключатель 19 или 20 в зависимости от направления складывания, и гидроцилиндры 13 срабатывают в соответствии с электросхемой на возврат секций 10 и I1 рамы 2 в прямолинейное положение.
При этом сигнализатор 32 указывает о прямолинейном положении, рамы 2, а сигнализаторы 33 или 34 указывают об отклонении и направлении отклонения секций 10 и 11 рамы 2 от прямолинейного положения.
При ручном управлении складыванием рамы 2 переключатель 24 смещается в крайнее положение влево или вправо в зависимости от направления поворота. Подается питание от источника 25 питания через контакты 35 на контакты 36 или 37 и на электромагниты 17 или 18 гидрораспределителя 16, который направляет поток масла к гидроцилиндрам J3 складывания рамы 2, Осуществляется складывание рамы 2 {на необходимый угол, затем водитель возвращает переключатель 24 в нейтральное положение. Для возврата рамы 2 в прямолинейное положение водитель поворачивает переключатель 24 в другую сторону и после выпрямления рамы 2 переводит переключатель в нейтральное положение. Но для вывода рамы из сложенного положения водитель может выключателем 31 включить автоматический возврат, предварительно поставив переключатель 24 в нейтральное- положение. При этом источник 25 питания связан через контакты 35 и 38, диод 30, выключатель 31 с реле 27, которое замыкает свои контакты 28 и 29, и далее через контакты 19 или 20 с элект-- ромагнитами 17 и 18 гидрораспределителя 16, Происходит автоматическое складывание рамы 2 до прямолинейного положения, в котором контакты 39 или 20 размыкаются и работает система автоматического слежения за прямолинейным положением рамы.
0
5
5
0
5
0
5
Таким образом, автоматический возврат секций рамы в прямолинейное положение работает как при случайном складывании секций, так и для облегчения условий работы водителя.
Формула изобретения
1.Система рулевого управления автогрейдера, имеющего шарнирно сочлененную раму и управляемые колеса, содержащая гидравлическую систему управления рулевым механизмом, включающую в себя гидравлический насос, связанный через распределитель с исполнительным гидроцилиндром, и систему управления шарнирно сочлененной рамой, содержащую дополнительный гидронасос, соединенный через трехпо зиционный гидрораспределитель с исполнительными гндроцилиндрами, отличающаяся тем, что, с целью повышения производительности автогрейдера путем обеспечения автоматизации системы управления шарнирно сочлененной рамой,она снабжена тремя нормально открытыми выключателями с механизмами их управления, ручным трехпозиционным переключателем, реле с двумя парами нормально открытых контактов , кнопочным нормально открытым выключателем и двумя диодами,, причем трехпозицнонный гидрораспределитель выполнен электроуправляемым, электромагниты которого электрически соединены одними своими входами с одним выходом источника питания, а другими соответственно с входными контактами ручного переключателя и с входами двух нормально открытых выключателей, выходы которых соединены через одну пару контактов реле с третьим контактом ручного переключателя, вход которого соединен с вторым выходом источника питания и входом третьего нормально открытого выключателя, а также через диод и параллельно соединенные кнопочный выключатель и вторую пару контактов - с обмоткой реле и выходом второго диода, вход которого соединен с выходом третьего нормально открытого выключателя, при этом механизм управления тремя нормально открытыми выключателями выполнен с возможностью опережения включения первого или второго выключателя относительно выключения третьего нормально открытого выключателя.
2«Система по п«1, отличающаяся тем, что снабжена тремя сигнализаторами и двумя дополнительными нормально открытыми выключателями, 5 входы которых соединены с одним выходом источника питания, а выходы через
сигнализаторы - с другим выходом источника питания, вход третьего сигнализатора соединен с выходом третьего нормально открытого выключателя, а выход - с выходом источника питания.

| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления поворотом автогрейдера | 1988 |
|
SU1604636A1 |
| Стенд для испытания автогрейдера | 1989 |
|
SU1647336A1 |
| Устройство для ограничения угла складывания шарнирно-сочлененных секций автопоезда | 1980 |
|
SU1032997A3 |
| Система поворота шарнирно-сочлененной гусеничной машины | 1987 |
|
SU1444222A1 |
| Устройство для управления колесами полуприцепа | 1979 |
|
SU872366A1 |
| Система рулевого управления транспортного средства | 1983 |
|
SU1133157A1 |
| Система рулевого управления транспортного средства | 1986 |
|
SU1324906A1 |
| Устройство для автоматической блокировки вертикального шарнира сцепки тягача с прицепным звеном | 1987 |
|
SU1411203A1 |
| Тягач для навесного и прицепного оборудования | 1981 |
|
SU1013330A1 |
| ГИДРОПРИВОД ОПРОКИДЫВАЮЩЕГО МЕХАНИЗМА ТРАНСПОРТНОГО СРЕДСТВА | 1990 |
|
RU2049690C1 |

Изобретение относится к машиностроению, в частности к транспортным средствам, преимущественно к системам управления поворотом шарнирно- сочлененных автогрейдеров. Цель изобретения - повышение производительности автогрейдера путем обеспечения автоматизации системы управления шарнирно сочлененной рамой. Система рулевого управления автогрейдера для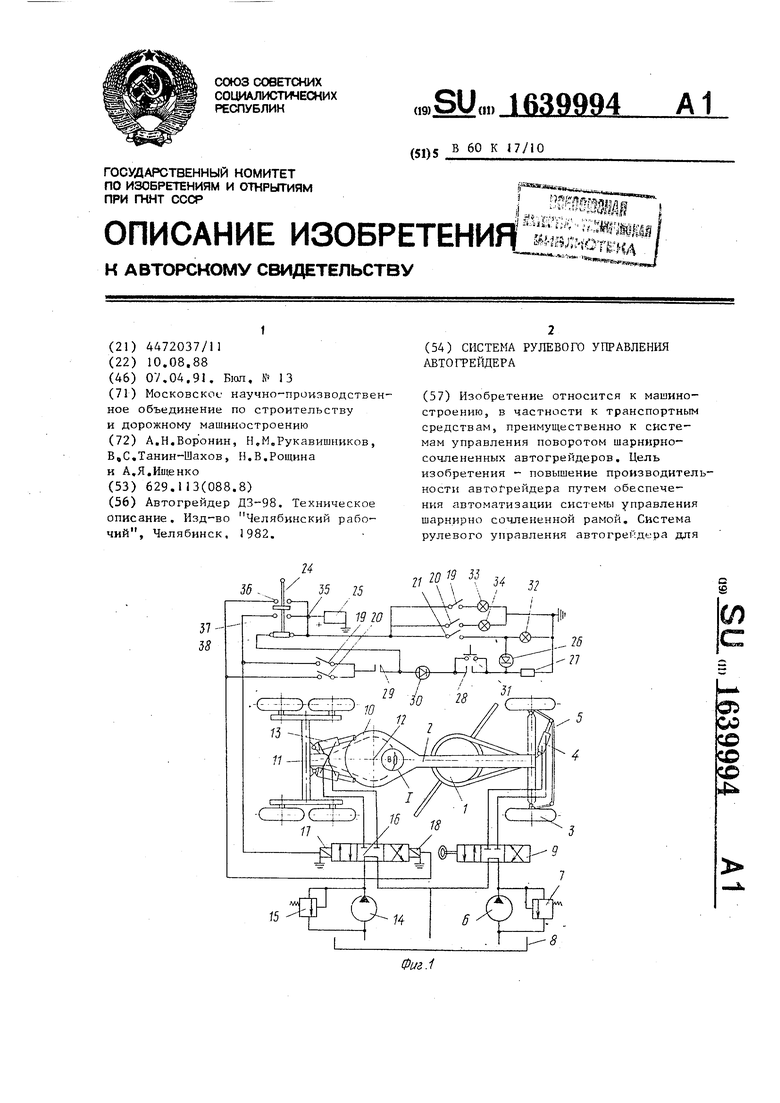
Фиг.2
| Дорожная спиртовая кухня | 1918 |
|
SU98A1 |
| Техническое описание | |||
| Изд-во Челябинский рабочий, Челябинск, 1982. | |||
