1
Изобретение относится к rpaHcnopTHtiMy машиностроению, в час;гности к самоблокирующимся дифференциапам, устанавливаемым между ведущими мостами и в ведущих мостах транспортных средств.5
Известен сомобпокирующийся дифференциал транспортного средства, содержащий корпус, внутри которого размещены обоймы, связанные с полуосями и взаимодействующие одна с другой посредством сухарных элементов 10
UJНедостатком такого дифференциала являются повышенные требования к точности , изготовления для обеспечения одновременной работы возможно большего количества сухар- 15 ных элементов, так как в противном случае резко повышаются напряжения в зоне их контакта с обоймами, что приводит к снижению, надежности и долговечности дифференциала.
Известен также самоблокируюшийся диффе20 ренциал транспортного средства, содержащий корпус, состоящий из двух частей, в которых установлены полуосевые обоймы, имеющие на торцовых поверхностях упоры, втулку, заключенную между обоймами, на наружной по-25
верхиости которой выполнены диаметральво расположенные пазы, в которых с тангенциальны зазором размещены хвостовики собачек, распол оженных на осях, каждая из которых установлен своими концами в частях корпуса подвижно в осевом направлении 2 .
Однако нечеткое срабатывание собачек на больших скоростях происходит вследствие слабого прижатия их к торцовым выступам полуосевых обойм, и&-за появления на бопьщих скоростях вращения сил трения, возникающих от центробежных сил, препятствующих перемещению осей собачек вдоль осв в прижатию собачек к торцовым упорам поп} осевых обойм. Увеличение же постоянно .действующих осевых сил за счеТ; пружин при небольших оборотах дифференциала влечет за собой повышение износа как упоров полуОсевых обойм, так и хвостовиков .собачек.
Целью изобретения является повыщение надежности в работе и долговечности: за счет преодоления сил трения, возникающих на осях собачек от центробежных сил, обеспечения постоянного оптимального усилия для пере- меи1ения собачек в осевом направлении.
Для достижения этой цели на торце кажгдой оси со стороны расположения хвостовик, собачки относительно связанной с ним iicviyосевой обоймы выполнен скос, а в частях корпуса радиальные каналы, в каждом из ко установлен подпружиненный в направлении оси собачки клиновсА упор, контактирующий своей Клиновой поверхностью со ско сом..
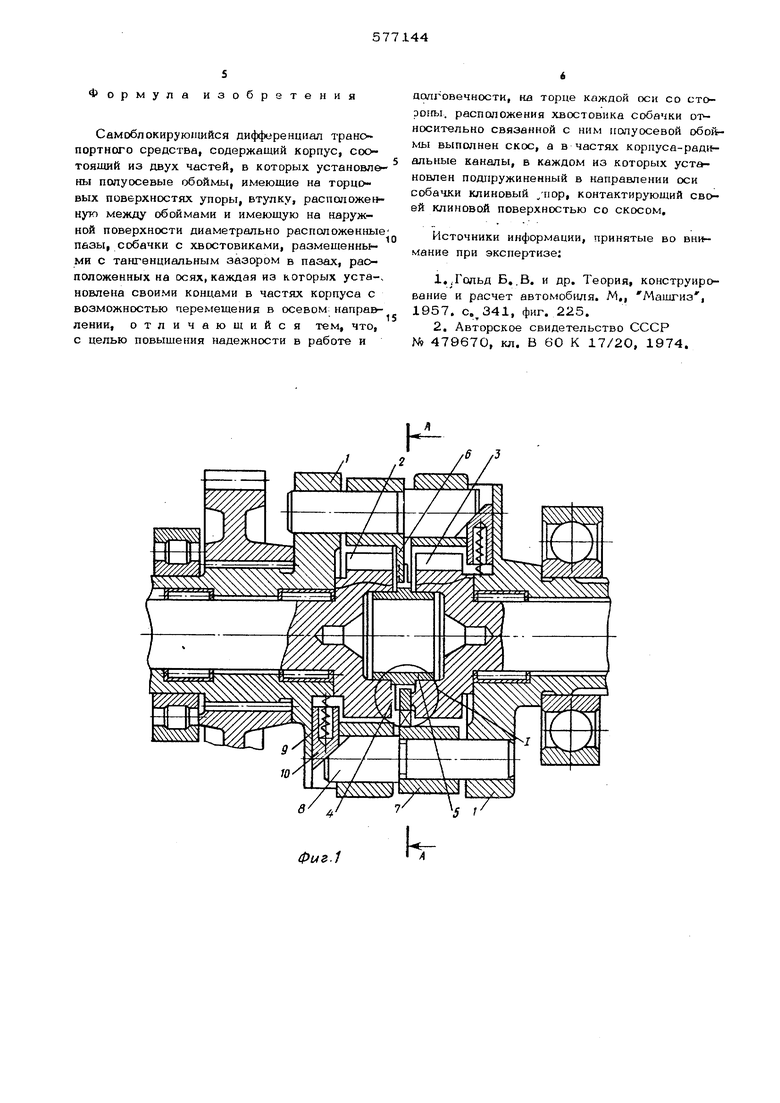
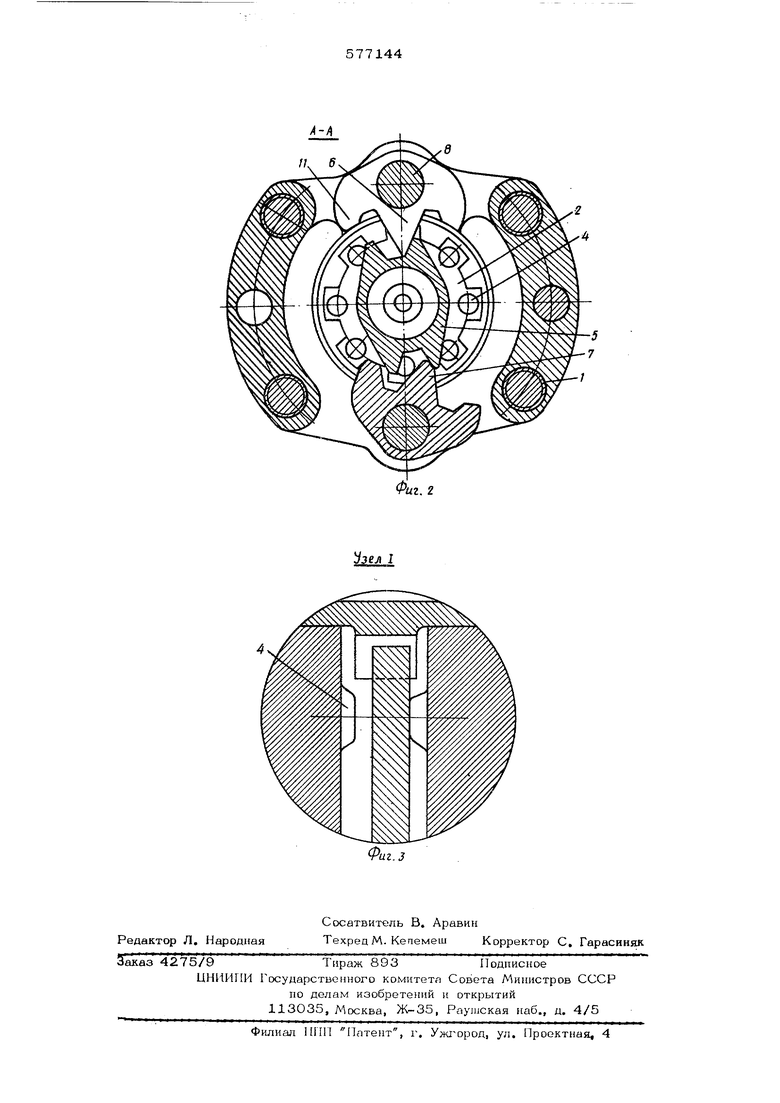
На фиг.;1 показан дифференциал, продоль ный разрез; на фи1, 2 - разрез по А-А (на фиг.,1)} на (Цжг,. 3 - узел 1 на фиг.,1.
Д1а фференциал содержит корпус 1, состоящий из двух частей, в которых установлены попуосевые обоймы 2 и 3, имеющие на торцовых поверхностях упоры 4 в виде yceneitных конусов или сфер, предназначенных для поворота собачек; втулку 5, заключенную между обоймами. .На наружной поверхности втулки выполнены диаметрально расположенные пазы, где с тангенциальным зазором размещены хвостовики собачек 6 и 7 (фиг, 2), расположечных на осях 8, каждая из ко торых установлена своими концами в частях корпуса 1 подвижно в осевом направлении,
В частях корпуса 1 выполнены также радиальные каналы, в кшкдом из которых установлен подпружиненный пружиной 9 в напра лении оси собачки клиновой упор 10, взаимо действующий своей клиновой поверхностью со скосом, выполненным на торце оси 8 собачки со стороны расположения хвостовика собачки относительно взаимодействующей с ним полуосевой обоймы. Собачки 6 и 7 имеют зубья 11.
Дифференциал работает следующим обра, зом.
При прямолинейном движении транспортно го средства крутящий момент передается на корпус 1 и через оси 8-собачкам 6 и 7, затем- полуосевым обоймам 2 и 3. Включение дифференциала при этом осуществляется силами пружин 9 совместно с центробежными силами от клиновых упоров 10, возЕшкающими при вращении корпуса 1 дифференциала.
Клиновые упоры 10 своими скосами давят на торцевые скосы осей 8 собачек 6 и 7. Чем бопьще скорость вращения диффереь циала, тем сильнее силы трения осей 8 собачек 6 и 7, возникающие о центробежных сил, препятствуют перемещению в осевом направлении собачек 6 и 7 и осей- 8 собачек и тем сильнее клиновые упоры 1О дей- ствуют на оси 8,
Центробежные силы клиновых упоров 10, воздействуя на оси 8, преодолевают силы трения, возникг1ющие на этих осях DT центр бежных сил, а пружины 9, 1шдл нмающие
клиновые упоры, 10, оптимальным усилием поджимают хвостовики собачек 6 и 7 вмео те с осями к торцовым упорам 4 полуосевых .обоим 2 и 3, Собачки 6 и 7 поворачивают ся относительно осей 8 до полного входа зубьев 11 в зацепление со щлицами полуосевых обойм 2 и 3 и начинают передават крутящий момент,
В это время хвостовики собачек 6 и 7 свободно располагаются в пазах втулки 5. При торможении центральным тормозом или двигателем корпус 1 вместе с собачками 6 и 7 поворачивается относительно полуосевых обойм 2 и 3, При встрече хвостовиt-t
ков собачек 6 и 7 с упорами 4 собачки поворачиваются относительно осей 8 и входят в зацепление с теми же полуосевыми обоймами 2 и 3 противоположными зубьями 11, осуществляя торможение. Втулка 5 при этом под действием хвостовиков собачек 6 и 7 поворачивается на некоторый угол, не мещая собачкам 6 и 7 входить в зацепление с зубь ми 11,
При повороте транс11ортно1 о средства одна из полуосевых обойм 2 и 3, например обойм 2, вращаясь быстрее обоймы 3, своим шлицем за внутренний скос зуба 11 собачки 6 выталкивает эту собачку из зацепления с обоймой 2, Втулка 5 под действием хвосто1вика собачки 6 поворачивается до выбора тангенциального зазора между стенками пазов втулки 5 и хвостовиками собачек 6 и 7 (см, положение собачки на фиг, 2), При упо ре втулки 5 в хвостовик собачки 7, Находящейся в зацеплении с обоймой 3 зубом 11, втулка 5 удерживает собачку 6, выщедщую из зацепления с полуосевой обоймой 2, от шальнейщего поворачивания,, т.е. удерживает собачку 6 в нейтральном положении.
При дальнейшем обгоне обоймы 2 упц)ы 4 проходят хвостовик собачки 6, перемещаюсобачку 6 вместе с осью 8 и отталкивают клиновой упор 10 в направлении, перпендикулярном к оси 8, сжимая при этом пружину 9..
Применение клиновых упоров, поджимаемы небольшими пружинами, создает оптимшшные силы, равномерно прижимающие хвостовики собачек к торцовым упорам полуосевых обойм как на больших, так и на малых оборотах ди4|френециала, в результате чего дифс юреннциал работает четко и надежно с минимгшьными износами.
Опасный дифференциал применеЕ на эксиеримент;;шы1Ых, иромьпши.ншлх, сольскох1х «йствон ых и лесных трйкто();1Х Г-8011, ЛГЗ-1 и I-80Л Линолкого ipaj TDpiii.uMj л.шод.-. Формула изобретения Самоблокируюшийся диффоренцнал транопортного средства, содержащий корпус, соотоящий из двух частей, в которых установл& HbF попуосевые обоймы, имеющие на торцовых поверхностях упоры, втулку, расположенную между обоймами и имеющую на наружной поверхности диаметрально расположенны пазы, собачки с хвостовиками, размещеннььми с тангенциальным зазором в пазах, раоположенных на осях, каждая из которых установлена своими концами в частях корпуса с возможностью перемещения в осевом направлении, отличающийся тем, что, с целью повыщения надежности в работе и долговечности, на торце каждой оси со сторО 1Ы. расположения хвостовика собачки относительно связанной с ним цолуосевой обоймы выполнен скос, а в частях корпуса-радиальные каналы, в каждом из которых установлен подпружиненный в направлении оси собачки клиновый /пор, контактирующий своей клиновой поверхностью со скосом. Источники информации, принятые во внимание при экспертизе: 1.Дольд Б..В. и др. Теория, конструирование и расчет автомобиля. М,, Машгиз, 1957. с,341, фиг. 225. 2. Авторское свидетельство СССР N9 479670, кл. В 60 К 17/20, 1974.
| название | год | авторы | номер документа |
|---|---|---|---|
| Самоблокирующийся дифференциал транспортного средства | 1980 |
|
SU933486A1 |
| Самоблокирующийся дифференциал свободного хода | 1970 |
|
SU479670A1 |
| САМОБЛОКИРУЮЩИЙСЯ ДИФФЕРЕНЦИАЛ СВОБОДНОГО ХОДА | 2012 |
|
RU2523721C2 |
| Самоблокирующийся дифференциал транспортного средства | 1987 |
|
SU1449371A1 |
| Самоблокирующийся дифференциал | 1975 |
|
SU612837A1 |
| Дифференциал переднего ведущего моста транспортного средства | 1987 |
|
SU1459953A1 |
| САМОБЛОКИРУЮЩИЙСЯ ДИФФЕРЕНЦИАЛ СВОБОДНОГО ХОДА ХРАПОВОГО ТИПА | 1973 |
|
SU380500A1 |
| Механизм свободного хода | 1983 |
|
SU1171616A1 |
| Коробка передач | 1983 |
|
SU1191656A1 |
| Механическая передача | 1982 |
|
SU1041322A1 |
фиг.1 Щ / VT/
