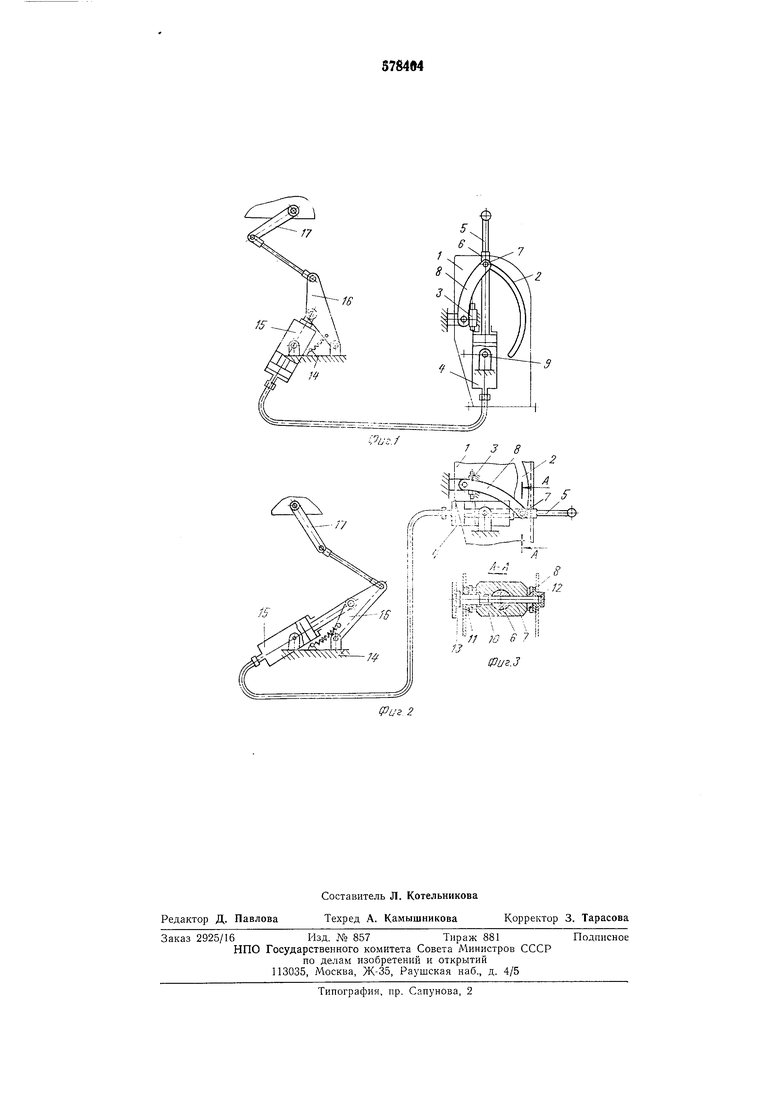
Механизм гидравлического дистанционного управления работает следующим образом.
При перемещении рычага 5 управления (вниз по пазу 2) происходит вталкивание щтока б в управляющий цилиндр 4 под действием рычага 8. При этом ось пальца 7 с втулками 11 и 12 описывает траекторию, совпадающую с осью радиусных пазов 2 кронштейна 1. Рабочая жидкость вытесняется из управляющего цилиндра 4 и по трубопроводу поступает в рабочий цилиндр 15, щток которого перемещает рычаг 16 и воздействует на поводок 17 рабочего органа.
С перемещением рычага 5 управления сопротивление в системе возрастает под де кствием возвратной пружины, связанной с рычагом 16 рабочего цилиндра 15, но одновременно с этим происходит изменение плеч рычага 5, так как часть потока ниже пальца 7 вталкивается в цилиндр, и усилие на рукоятке рычага 5 управления остается постоянным.
При перемещении рычага 5 управления вверх поводок 17 агрегата рабочего органа перемещается в направлении исходного положения. Упор 3 взаимодействует с корпусом управляющего цилиндра 4 и предназначен для настройки положения рычага 5 в исходный режим управления агрегатом.
Рычаг 5 управления может быть надежно зафиксирован в любом промежуточном положений агрегата. При этом обойма 10 по резьбовому соединению пальца 7 смещается в сторону втулки 11, а торец пальца смещается в сторону втулки 12.
При этом втулки И и 12 зажимаются в пазах 2 кронштейна 1.
Формула изобретения
Механизм гидравлического дистанционного
управления рабочим органом дорожно-строительных мащин, включающий управляющий и рабочий цилиндры, рычаг управления, рычаг рабочего цилиндра,: кронштейн и трубопроводы, отличающийся тем, что, с целью обеспечения постоянного усилия на рычаге управления, управляющий цилиндр шарнирно закреплен на кронщтейне, выполненном с радиусными пазами и снабженном упором, взаимодействующим с корпусом управляющего цилнндра, щток которого оснащен пальцем, связанным с пазами посредством направляющего рычага, щарнирно установленного на кронштейне эксцентрично оси поворота управляющего цилиндра, при этом палец щтока имеет
зажимную обойму, соединенную посредством втулок с пазами кронштейна.
Источники информации, принятые во внимание при экспертизе 1. Ланцбург Я. Б. Справочник молодого машиниста экскаватора, 1968, с. 37-60.
Фиг.З
| название | год | авторы | номер документа |
|---|---|---|---|
| Станок для доводки плоских поверхностей | 1985 |
|
SU1284803A1 |
| Агрегат для изготовления полых изделий | 1973 |
|
SU564970A1 |
| Устройство для измерения размеров трубы | 1990 |
|
SU1747862A1 |
| Механизм для осуществления возвратно-поступательного движения | 1961 |
|
SU146162A1 |
| Гидравлическое реле времени | 1983 |
|
SU1123596A1 |
| ГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ | 1965 |
|
SU170308A1 |
| Загрузочное устройство | 1977 |
|
SU701759A1 |
| Устройство для обработки корпуса судна в доке | 1983 |
|
SU1085892A1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2167100C1 |
| Установка для бестраншейной прокладки трубопроводов прокалыванием | 1983 |
|
SU1158696A1 |