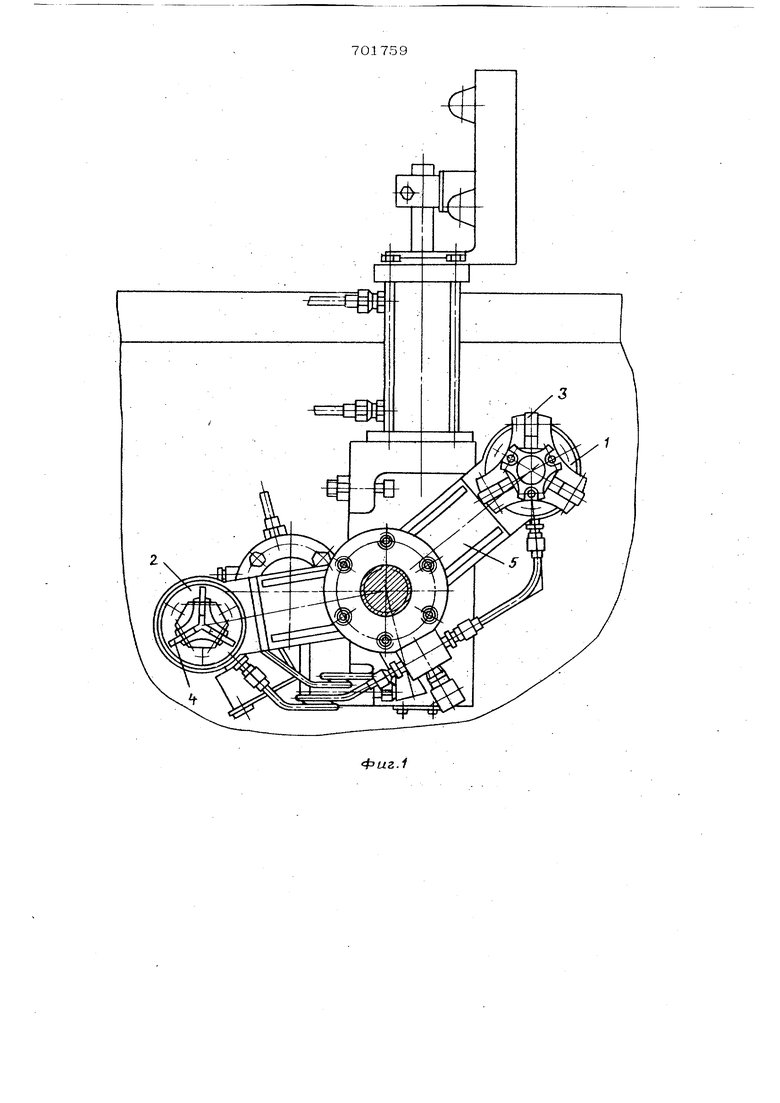
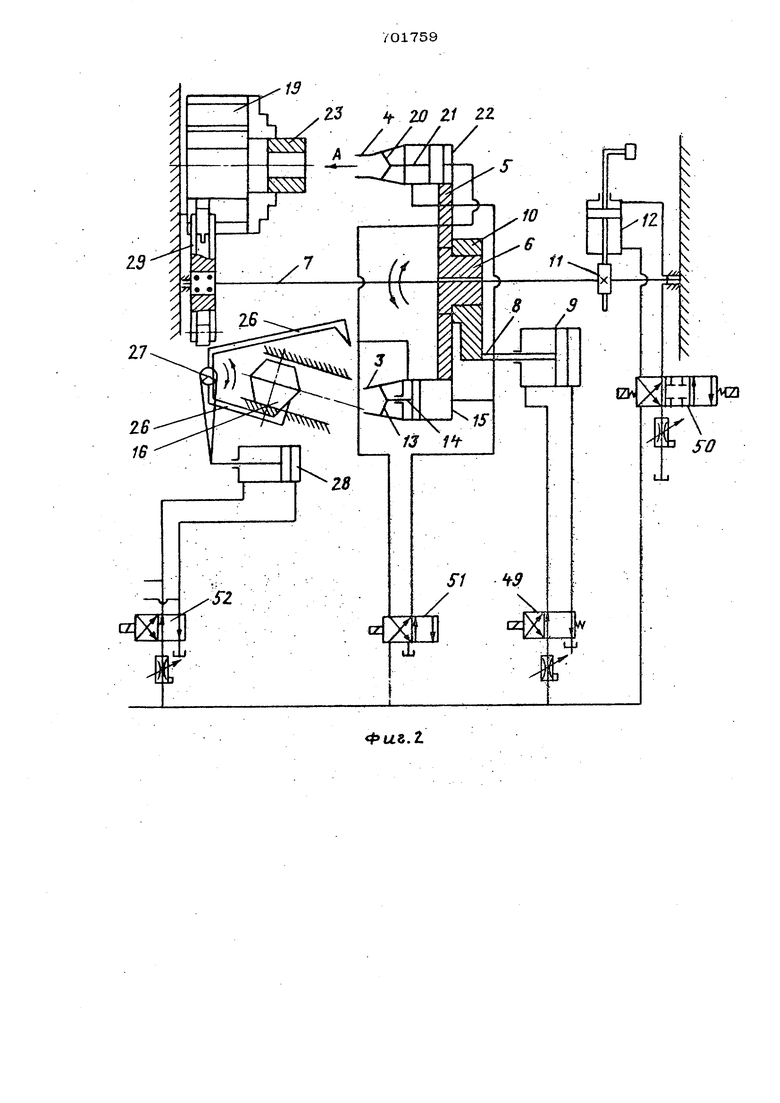
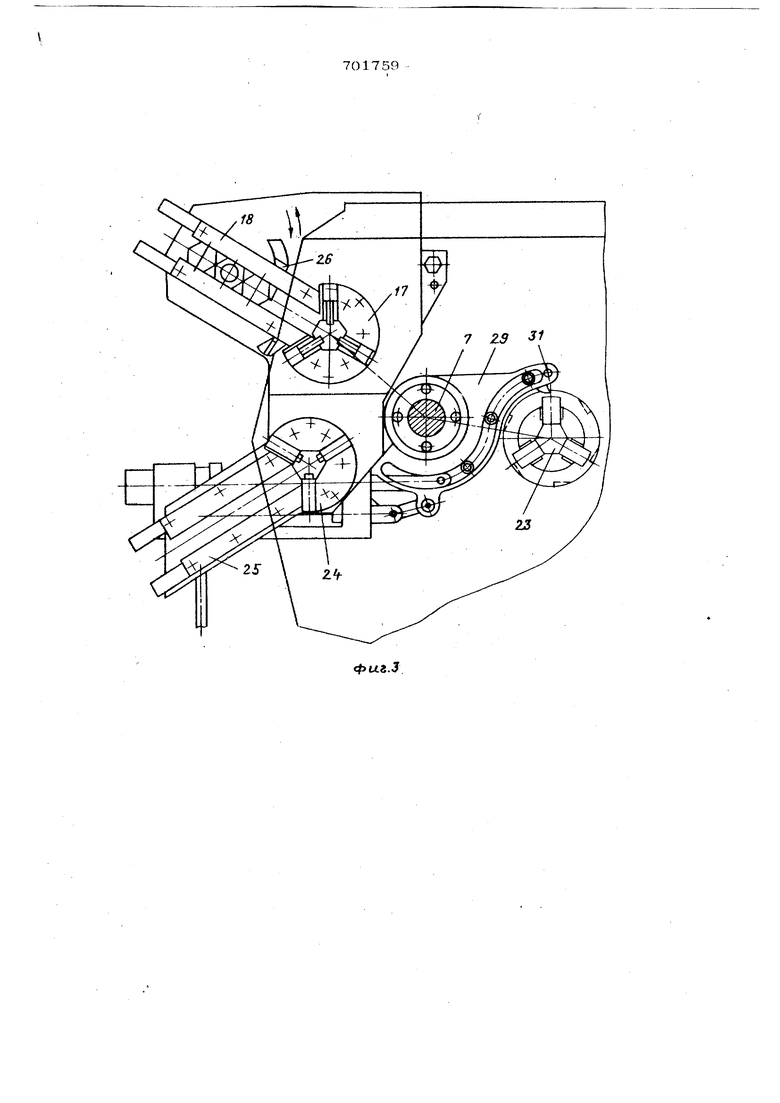
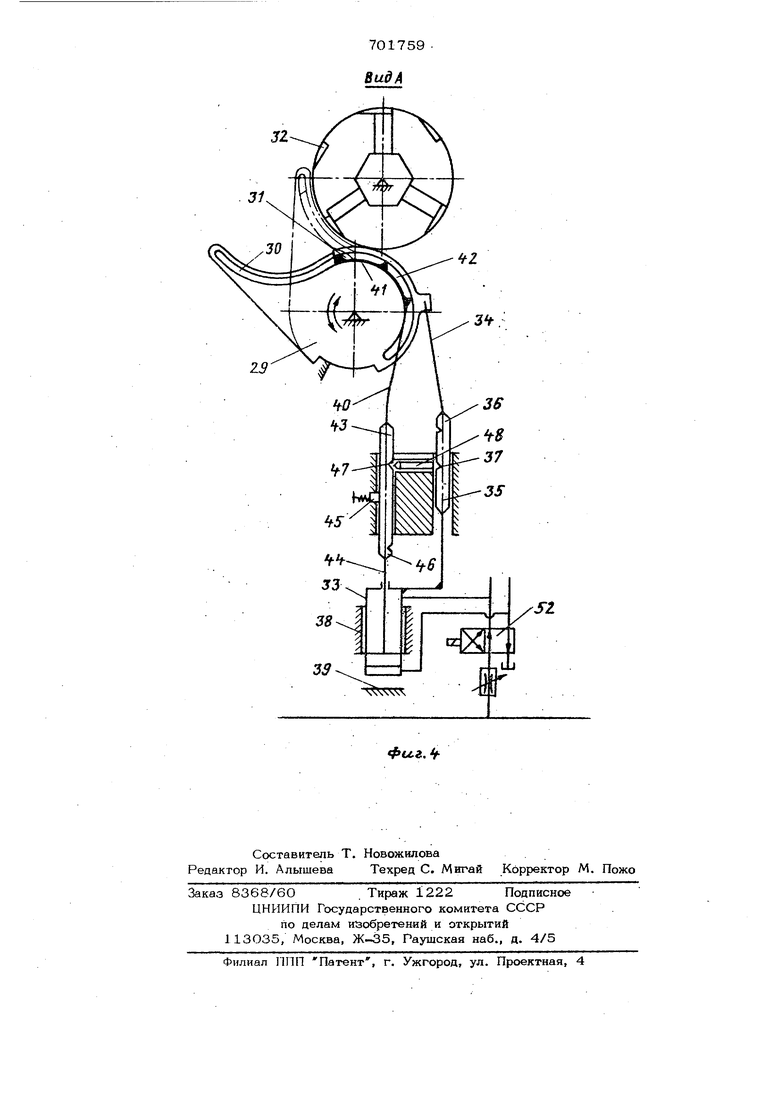
Изобретение относится к области машиностроения и может быть использовано при загрузке некруглых заготовок преимущественно на токарных многошпин дельных автоматах. Известны устройства для загрузки и выгрузки штучных заготовок, выполненные в виде держатялр с захватами с воз можностью поворота и осевого перемеще ния l. Однако такие устройства пригодны дл загрузки и выгрузки заготовок только круглой формы. Известно также устройство для загрузки и выгрузки некруглых; заготовок в патрон станка, содержащее два захвата, вращающиеся и перемещающиеся возвратно-поступательно от общего пневмопривода, механизм ориентации захватов относительно патрона станка в виде шта ги, шарнирно закрепленной на захвате, накладных кулачков, установленных на наружной поверхности патрона стайка В угловом положении, подающего и отводящего лотков 2j. Такое устройство ненадежно в работе из-за возможной поломки щтанги при взаимодействии с накладными кулачками патрона. Целью изобретения является повыщение надежности устройства в работе. Это достигается тем, что в предложенном устройстве механизм ориентации выполнен в виде диска с криволинейным пазом и установленного в нем подпружиненного поводки с возможностью возврат- н6-поступательного перемещения и взаимодействия с упорными пазами патрона станка. На фиг. 1 изображен держатель с захватами; на фиг. 2 - предложенное устройство, совмещенная кинематическая и гидравлическая схема; на фиг. 3 - отводящий и подающий лотки с ориентирующим механизмом; на фиг. 4 - вид по стрелке А на фиг. 2 и совмещенная кинематическая 3 и гидравлическая схема механизма ориен тации. Устройство состоит из захватов 1 и 2, снабженных кулачками 3, 4 один из которых; сориентирован в вертикальной плоскости. Захваты 1 и 2 установлены на держателе 5, закрепленном на втулке 6 с возможностью возвратно-поступа тельного перемещения по валу 7 при помощи штока 8, гидроцилиндра 9 и кронштейна 1О, а также поворота посредством зубчатореечной передачи 11 и гидро- .цилиндра 12. Кулачки 3 захвата 1 шариир но соединены тягами 13 со штоком 14 гидроцилиндра 15 и предназначены для захвата заготовки 16 из приемника 17 подающего лотка 18 по граням и перено са ее в патрон 19 станка. Кулачки 4 захвата 2 шарнирно соединены тягами 20 со штоком 21 гидроцилиндра 22 и предназначены для захвата-обработанной заготовки 23.из патрона станка по обработанному отверстию и сбрасывания ее в нриемник 24 отводящего лотка 25 Подающий лоток 18 снабжен отсекателем в виде рычага 26, установленного на оси 27 с возможностью поворота от гидроцилиндра 2 8.Механизм ориентации патрона станка относительно кулачков 3 захвата 1 выполнен в виде диска 29 с криволинейным пазом ЗО, в котором установлен подпружиненный поводок 31, взаимодействующий с упорными пазами 32 патрона станка. Диск 29 имеет возможность поворота относительно вала 7 при помощи гидроцилиндра 33 через тяги 34 и планку 35 с выемками 36 и 37. Гидроцилиндр 33 установлен с возможностью поступательного движения в отверстии корпуса 38 до упора 39. Подпружиненный поводок 31 связан через систему тяг 4О, 41 и 42 с планкой 43, которая жестко соединена со щтоком 44. Планка 43 заторможена тор мозным- устройством 45, выполненным в виде пружины с поршнем (не показаны и имеет выемки 46 и47.для фиксации ее положения. Планки 35 и 43 соедин ны фиксатором 48, который предназначен для исключения их одновреме}1ного перемещения. Управление гидроцилинцрами 9 и 12 осуществляется.соответственно золотниками 49 и 50, Гидроцилинпры 15 и 22 управляются золотником 51, а rjmpouH линдры 28 и 33 - золотником 52. Рабсггй загрузочного устройства описана для .случая, когда все патроны за1 94 ружены и с загрузочной позиции подощла обработанная заготовка 23. После прекращения вращения патрона 19 в загрузочной позиции подается команда золотнику 52, который пропускает масло в правую полость гидроцилиндра 28 и нижнюю полость гидроцилиндра 33, Рычаги 26 отсекателя под действием штока поршня гидроцилиндра 28 поворачиваются относительно оси 27 в крайнее нижнее положение. Заготовка 16 под действием собственного веса скатывается по направляющим лотка 18 и удерживается верхним рычагом 26. Вследствие того, что планка 43 находится под действием тормозного устройства 45, шток 44 остается неподвижным, а корпус гидроцилиндра 33 получает возможность перемещения в отверстиии корпуса 38 до упора 39. Планка 35, перемещаясь в нижнее крайнее положение, выталкивает из выемки 37 фиксатор 48 в выемку 47 и через тягу 34 поворачивает диск 29 до соприкосновения подпружиненного поводка 31 с поверхностью патрона 19. По достижении корпусом гидроцилиндра 33 упора 39 выемка 36 устанавливается напротив фиксатора 48, поршень со штоком 44 и планкой 43 перемещаются, фиксатор 48 выемкой 47 выталкивается в выемку 36, фиксируя планку 35. Подпружиненный поводок 31 через систему тяг 40, 41 и 42 перемещается по криволинейному пазу 30, взаимодействуя с упорным пазом 32, и доворачивает патрон 19 до угла, соответствующего центральному углу грани заготовки (например для шестигранника 60 ), относительно которого сориентированы кулачки 3 захвата 1. Йосле этого золотник 52 переключается на обратный ход гидроци- линдра 28 и 33. Рычаги 26 возвращаются в исходное положение, при этом нижний рычаг отсекает очередную заготовку, а верхний - освобождает заготовку 16, которая под действием собственного веса по направляющим подающего лотка 18 скатывается в приемник 17, Планка 35, перемещаясь в обратном направлении от корпуса гидроцилиндра 33, выемкой 36 выталкивает фиксатор 48, фиксирует планку 43 по выемке 46 и возвращает диск ,29. с помощью тяги 34 в исходное положение. После этого перемещается планка 43 от штока 44, выемкой 46 выталкивает фиксатор 48 в выемку 36, фиксирует планку 35 н возвращает подпружиненный поводок в исход- ное положение с помощью тяг 4О, 41 и 42. В исходном папожении захваты 1 и 2 находятся в крайнем правом положении. Ось захвата 1 совмещена с осью приемника 17, а ось захвата 2-е осью пат рона станка 19. Кулачки 3 разжаты, а кулачки 4 сжаты. После возвращения подпружиненного поводка 31 и рычагов 26 в исходное положение подается команда золотнику 49, который пропускает масло в правую полость гидроцилиндра 9. Шток 8 с крон штейном 10 перемещает в левое крайнее положение по валу 7 втулку .6 с держателем 5 и захватами 1 и 2. Кулачки 3 захвата 1 входят в приемник 17, а кулачки 4 в отверстие обработанной заготовки 23. После этого подается команд золотнику 51 на подачу масла в левую полость гидроцилиндра 15 и в правую Пч. лость гидроцилиндра 22. Кулачки 3 посредством штока 14 и тяг 13 зажимают в приемнике 17 заготовку 16, а кулачки 4 зажимают по внутреннему отверстию обработанную заготовку 23. Одновременно подается команда патрону станка 19 на разжим заготовки 23. Затем срабаты вает золотник 51 на обратный ход, масло заполняет левую полость гидроцилинд- ра 9, шток 8 с кронштейном 10 перемещает в исходное положение втулку 6 с держателем 5 и с захватами 1 и 2. По команде золотника 50 шток гидро цилиндра 12 через зубчатореечную передачу 11 и вал 7 переносит захватом 1 заготовку 16 из приемника 17 в патрон станка 19, а захватом 2 - обработанную заготовку 23 в приемник 24 отводящего лотка 25. Окончание цикла переноса заготовок является сигналом на включение в работу гидроцилиндра 9 от золотника 49. Захватывающие головки 1 и 2 посредством штока 8, втулки 6, кронштейна 1О, держателя 5 перемещаются снова в край- 596 нее левое положение. Обработанная заготовка 23 входит в приемник 24, а взятая из приемника 17 - в патрон 19. Одновременно подается команда на зажим заготовки в патроне 16 на раз- КИМ кулачкам 3 и сжатие кулачкам 4. После чего захватывающие головки 1 и 2 с помощью штока 8 гидродил нндра 9 возвращаются в крайнее правое положение, подается команда штоку гидроцилиндра 12 с помощью зубчатого реечной передачи и вала 7 на разворот захватывающих головок 1 и 2 в исходное положение. Затем включается патрон 19, поворачивается шпиндельный блок и следующий патрон с обработанной заготовкой припадает в загруйочиую позицию. Далее цикл загрузки повторяется. Формула изобретения Загрузочное устройство, например, к токарным многошпиндельным полуавтоматом, содержащее держатель г захватами, установленный с возможностью по- ворота и осевого перемещения патрон станка с упорными пазами и механизмом его ориентации относительно захватов, подающий и отводящий лотки, отличающееся тем, что, с целью повышения надежности в работе, механизм ориентации выполнен в виде диска с криволинейным пазом и подпружиненного поводка, установленного в нем с возможностью возвратнонпоступательно- го перемещения и взаимодействия с упорными пазами патрона станка. . Источники информации, принятые во внимание при экспертизе 1.Малов А. Н. Загрузочные устройства для металлорежущих станков. М., 1965, с. 152-153, ф. 89. 2.Авторское свидетельство СССР № 359130, кл,., В 23ie 7/04, 1972.
32
.г. 4
| название | год | авторы | номер документа |
|---|---|---|---|
| Питатель токарного многошпиндельного станка | 1985 |
|
SU1323331A1 |
| СТАНОК-АВТОМАТ ДЛЯ НАПЛАВКИ ПОЯСКОВ ПА ТРУБНЫЕЗАГОТОВКИ | 1968 |
|
SU231687A1 |
| Автооператор | 1970 |
|
SU355848A1 |
| Приспособление к многошпиндельному токарному полуавтомату для автоматической установки в патрон я съема заготовок подшипниковых колец | 1951 |
|
SU95385A1 |
| Манипулятор | 1978 |
|
SU973351A2 |
| Устройство для наружного хонингования пакетов поршневых колец | 1980 |
|
SU1024242A1 |
| Устройство для загрузки и разгрузки токарного многошпиндельного станка | 1986 |
|
SU1340976A1 |
| Станок для обрезки полых деталей | 1981 |
|
SU958044A1 |
| Загрузочное устройство | 1985 |
|
SU1298038A1 |
| Гидравлическое устройство привода зажимных патронов токарных станков | 1990 |
|
SU1811997A1 |