/(54) СПОСОБ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ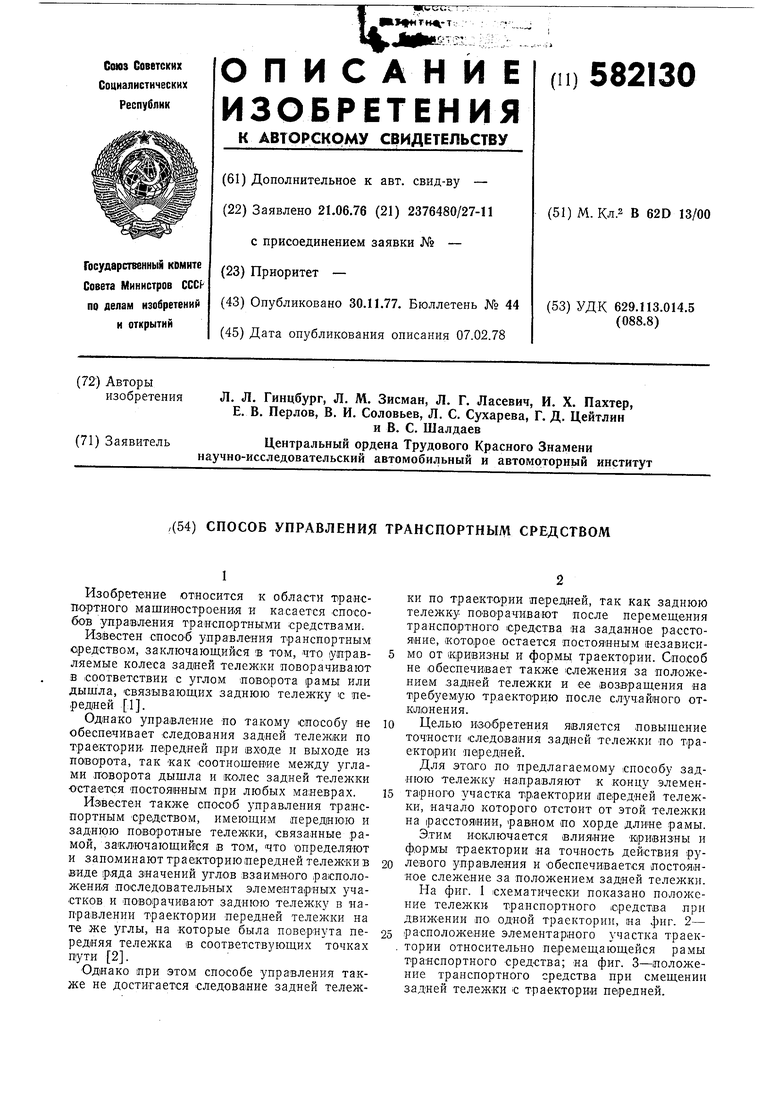
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СОЧЛЕНЁННОГО ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2601077C1 |
| Устройство рулевого управления транспортного средства | 1977 |
|
SU734049A1 |
| Прицеп транспортного средства | 1988 |
|
SU1556988A1 |
| Устройство для управления транспорт-НыМ СРЕдСТВОМ | 1978 |
|
SU809076A1 |
| Способ автоматического вождения колесного транспортного средства | 1985 |
|
SU1273287A1 |
| ДЫШЛО АВТОПРИЦЕПА | 2008 |
|
RU2420420C2 |
| Способ управления задними колесами транспортного звена | 1982 |
|
SU1034939A1 |
| Способ управления транспортным средством | 1990 |
|
SU1754552A1 |
| СИСТЕМА ПОМОЩИ ПРИ ДВИЖЕНИИ ЗАДНИМ ХОДОМ С ПРИЦЕПОМ | 2015 |
|
RU2608786C2 |
| ПРИЦЕПНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2007 |
|
RU2340505C1 |
1
Изобретение относится к области транспортного машиностроени.я и касается -способов управления транспортными средствами.
Известен спосОб управления транспортным средством, заключающийся в том, что управляемые колеса задней тележки поворачивают в соответствии с углом поворота рамы или дышла, связывающих заднюю тележку с передней :1.
Однако управление по такому способу не обеспечивает следования задней тележки по траектории, передней при входе и выходе из поворота, так как Соотношение между углами поворота дышла и колес задней тележки остается постоянным при любых маневрах.
Из(вестен также способ управления транспортным средством, имеющим переднюю и заднюю поворотные тележки, связанные рамой, заключающийся в том, ЧТО определяют и запоминают траекторию передней тележки в виде ряда значений углов взаимного расположения последовательных элементарных участков и поворачивают заднюю тележку в направлении траектории передней тележки на те же углы, на которые была повернута передняя тележка в соответствующих точках пути 2.
Однако при этом способе управления также не достигается следовадие задней тележки по траектории лередн-ей, так как заднюю тележку поворачивают после перемещения транспортного средства яа заданное расстояние, которое остается постоянным независиМО от кривизны и формы траектории. Способ не обеспечивает также слежения за положением .задней тележки и ее возвращения «а требуемую траекторию после случайного отклонения.
Целью изобретения является повышение точности следования задней тележки по траектории передней.
Для зто,го по предлагаемому способу заднюю тележку направляют к концу элементарного участка тр.аектории передней тележки, начало которого отстоит от этой тележки на расстоянии, равном по хорде длине рамы. Этим исключается влияние кривизны и формы траектории на точность действия рулевого управления и обеспечивается постоянное слежение за положением задней тележки. На фиг. 1 схематически показано положение тележки транспортного средства при движении по одной траектории, на фиг. 2-
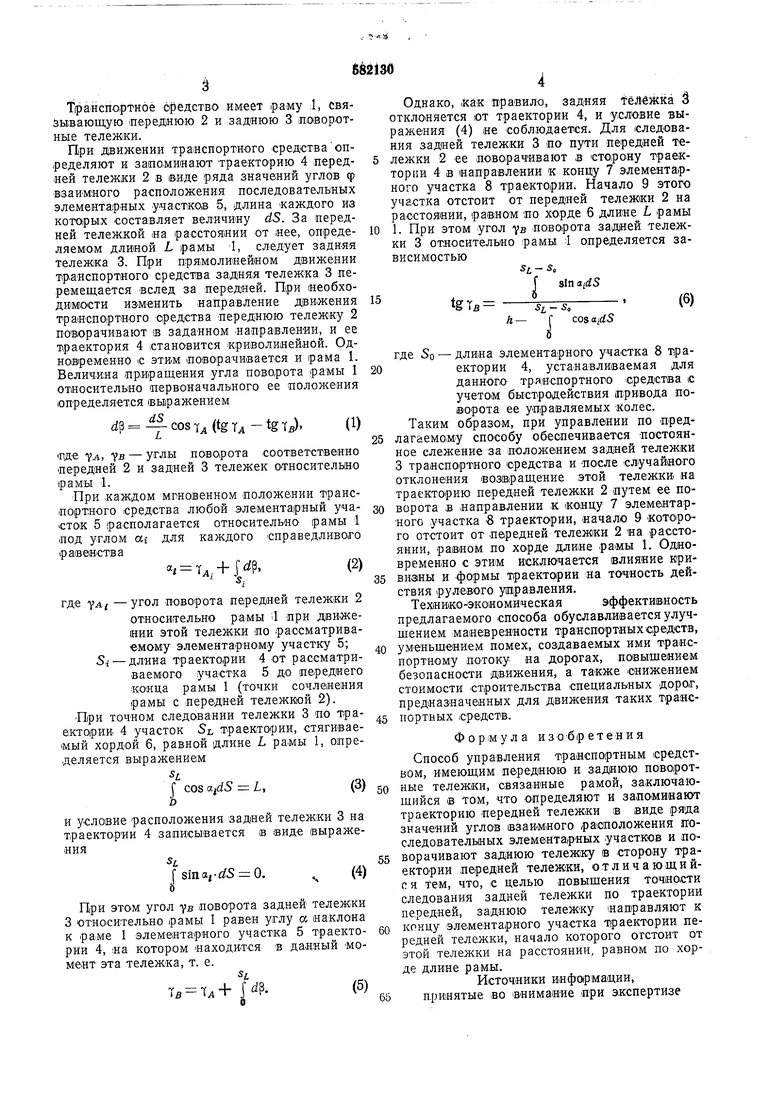
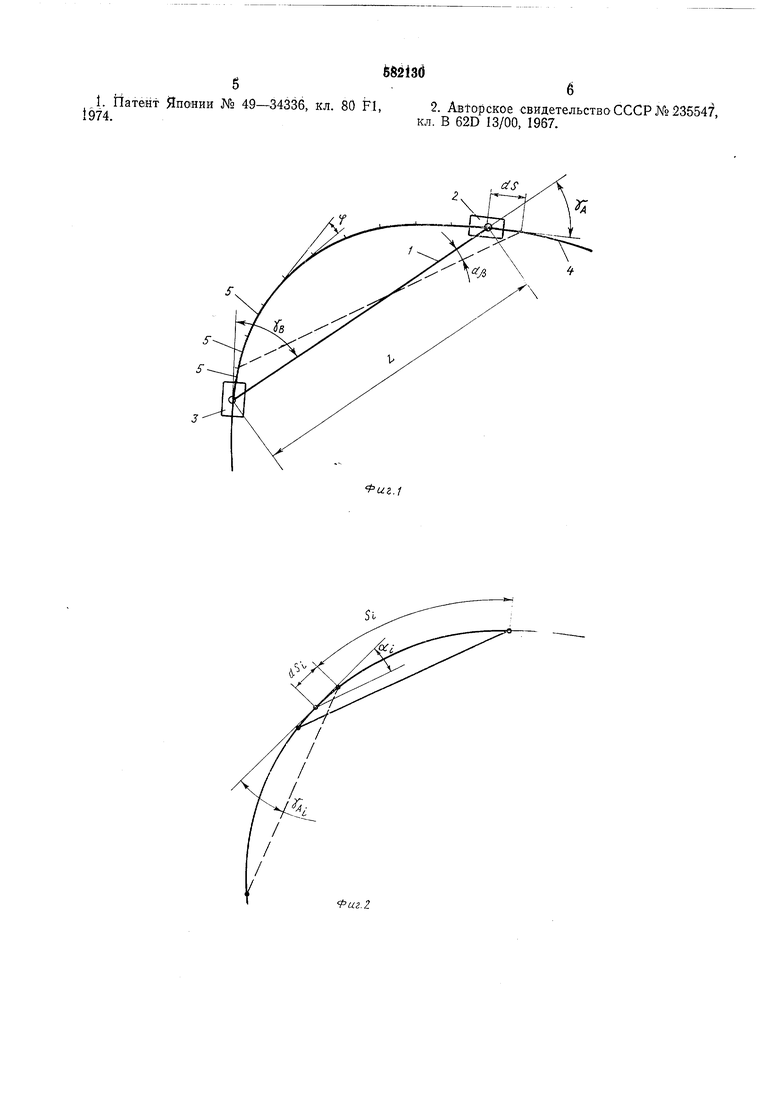
расположение элементарного участка траектории относительно перемещающейся рамы транспортного средства; яа фиг. 3-положение транспортного средства при смещении задней тележки с траектории передней.
Т|ра«спортноё Средство имеет раму 1, связывающую переднюю 2 и заднюю 3 товор-отные тележки.
При движении траиспортного средстваопределяют и запоминают траекторию 4 передней тележки 2 в 1виде ряда значений углов ф взаимного расположения последовательных элементарных участков 5, длина каждого из которых составляет вел-ичину dS. За передней тележкой «а расстоянии от нее, определяемом длиной L рамы 1, следует задн-яя тележка 3. При прямолинейном движении транспортного средст ва задняя тележка 3 перемещается вслед за передней. При (необходимости изменить направление движения транспортного средства -переднюю тележку 2 поворачивают ;В заданном .направлении, и ее праектория 4 становится криволинейной. Однов1ременно с этим яоворачивается и рама 1. Величина /праращения угла поворота рамы 1 относительно тервоначальиого ее полол ения определяется выражением
dp cos-r(tgT -tgTB).(1)
тде УА, V-B - углы поворота соответственно Передней 2 и задней 3 тележек относительно |рамы 1.
При .каждом мгновенном положении транспортного средства элементарный участок 5 располагается относительно рамы 1 лод углом ttj для каждого справедливого равеиства
-ГА. + (2)
-S;
где AI -угол поворота передней тележки 2 относительно рамы 1 при движении этой тележки по рассматриваемому элементарному участку 5; Si - длина траектории 4 от рассматриваемого участка 5 до переднего «ояца рамы 1 (точки сочленения рамы с передней тележкой 2). При точном следовании тележки 3 по траектории 4 участок Sb траектории, стягиваемый хордой б, равной длине L рамы 1, определяется выражением
SL
cos а|С(5 - L,(3)
I
и условие расположения задней тележки 3 на траектории 4 записывается в виде выражения
|sma,.rfS 0.. (4)
При этом угол УВ поворота задней тележ.ки 3 относительно рамы 1 равен углу а наклона к раме 1 элементарного участка 5 траектории 4, на котором находится -в данный момент эта тележка, т. е.
Ь-Тл+Т. (5) о
Однако, как правило, задняя тел-ежйа 3 отклоняется от траектории 4, и усл1овие выражения (4) не соблюдается. Для (следования задней тележки 3 по пути передней тележки 2 ее поворач-ивают в сторону траектории 4 в направлении к концу 7 элементарного участка 8 траектории. Начало 9 этого участка отстоит от передней тележки 2 на расстоянии, равном по хорде б длине L рамы 1. При этом угол YB поворота задней тележки 3 относительно рамы 1 определяется зависимостью
SL-S,
sin aids
(6)
SL-S,
cos Ojd5
ft-
где So -длина элементарного 8 Tipaектории 4, устанавливаемая для данного трянспортного .средства ic учетом быстродействия привода поворота ее управляемых жолес. Таким образом, при управлении по предлагаемому способу обеспечивается постоянное слежение за положением задней тележки 3 транспортного средства и лосле случайного отклонения возвращение этой тележки на траекторию передней тележки 2 путем ее поворота в направлении к «.онцу 7 элементарного .участка % траектории, начало 9 которого отстоит от .передней тележки 2 на расстоянии, равном ло хорде длине рамы 1. Одновременно с этим исключается влияние вривианы и формы траектории на точность действия рулевого управления.
TexiHBKO -экон омич е екаяэффективн о.сть
предлагаемого способа обуславливается улучшением маневренности транспортных средств, уменьшением помех, создаваемых ими транспортному потоку на дорогах, павышеиие.м безопасности движения, а также снижением стоимости строительства специальных дорог, предназначенных для движения таких транспортных сре.дств.
Формула изо.бретения
Способ управления транспортным средством, имеющим переднюю и заднюю поворотные тележки, связанные рамой, заключающийся е том, что определяют и запоминают траекторию передней тележки в виде ряда значений углов взаимного расположения последовательных элементарных участков и поворачивают заднюю тележку в .сторону траектории передней тележки, отличаю.щийс я тем, что, с целью повышения точности следования задней тележки по траектории передней, заднюю тележку «направляют к концу элементарного участка Т|раектории передней тележки, начало которого отстоит от этой тележки на расстоянии, равном по хорде длине рамы.
Источники инфармащии, принятые во внимание при экспертизе 1. Патент Японии № 49-34336, кл. 80 Fl, 1974.
S
afS
Puz.Z 2. Ав1орское свидетельство СССР №235547, кл. В 62D 13/00, 1967.
.З
