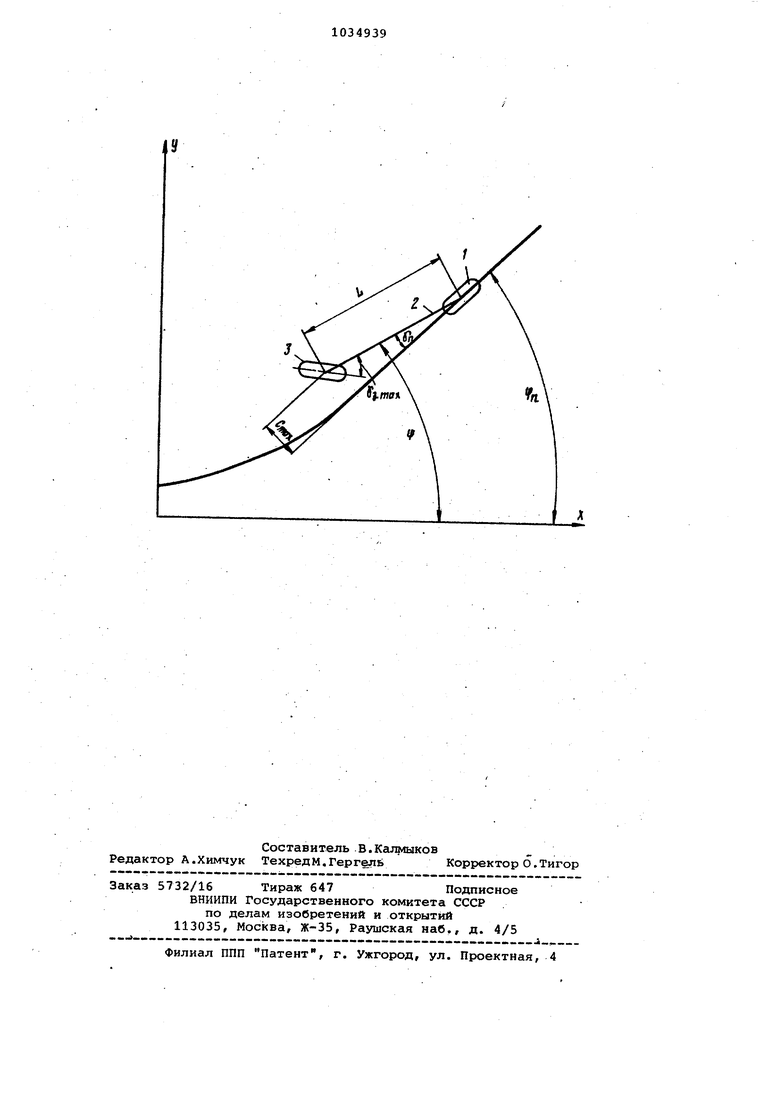
Изобретение относится к управлению автотранспортными звеньями как одиночными длиннобазными, так и многозвенными. Известен способ управления коле7 сами прицепных звеньев транспортного средства, заключающийся в том, что определяют угол поворота передних колес, задерживают сигнал и поворачивают задние колеса на прямолинейном участке траектории движения вдоль рамы транспортного средства Cl Недостатком этого способа являет ся то,что на повороте задние колеса поворачивают на угол поворота пе редних колес после задержки сигнала а прямолинейный участок движения оп ределяют путем сравнения задержанно сигнала с нулевым, которые должны быть равны между собой на прямолинейном участке. В результате этого способ применения как для управлени задними колесами на повороте, так и для стабилизации движения на прямолинейном участке таких автотранспор j.HbDc звеньев, колеса которых поворачиваются относительно рамы, а не объединены в независимую поворотную переднюю и заднюю тележку, как в ук занном споробе. В реальных условиях эксплуатации транспортного звена из-за неточности процесса управлени несовершенства самого способа управ ления и наличия различных неучтенных факторов Iпроскальзывания колес бокового увода эластичных шин и др. после прохождения поворота и выхода на прямолинейный участок будут имет iместо смещения задних колес относительно прямолинейной траектори.и дви жения передних колес. И если передние колеса звена не объединены в независимую поворотную тележку, а выполнены поворотными, относительно рамы звена, то угол их поворота относительно рамы будет отличаться от нуля, в том числе и после задерж ки, что не позволит определить момент времени для , поворота задних колес вдоль рамы звена с целью стабилизации прямолинейного движеI ния. ., Известен также способ управления задними колесами транспортного звена, заключающийся в том, что определяют угол поворота рамы транспортного звена и угол поворота передних колес относительно рамы и задерживают сигнсш, пропорциональный сумме этих углов на время прохождения задними кодесами пути запаздывания, равного расстоянию до передних колес и поворачивают задние колеса, при движении передних колес по криволинейному участку пути на угол, полученный,, вычитанием из суммарного угла после задержки сигнала, угла поворота рамы звена 2. Недбстатком известного способа является то, что в реальных условиях эксплуатации транспортного звена он не обеспечиваетточное движение задних -колес по траектории движения передних колес на повороте, а после прохождения поворота возникшие смещения задних колес относительно траектории движения передних колес не уменьшаются на прямолинейном участке движения передних колес. Указанные смещения защних колес на повороте возникают из-за неточности процесса управления, а также наличия неучтенных факторов ( бокового увода эластичных шин, проскальзывания и юза колес). Цель изобретения - улучшение управляемости путем уменьшения рассогласования траекторий движения передних и задних колес звена на прямолинейном участке пути. Указанная цель достигается тем, |что согласно способу управления .задними колесами транспортного звена, поворотными относительно рамы звена, зактноч ющемуся в том, что определяют угол поворота рамы транспортного звена и угол поворота передних колес относительно этой рамы, задерживают сигнал, пропорциональный .сумме этих углов, на время прохождения задними колесами пути запаздывания, равного расстоянию, до передних колес, и поворачивают задние колеса, при движении передних колес по криволинейному участку путн на угол, полученный вычитанием из суммарного угла, после задержки сигнала, угла поворота рамы звена, поворачивают задние колеса в сторону прямолинейного участка траектории движения передних колес при равенстве значений суммарных углов до и после задержки. Кроме тбго, угол поворота задних колес регулируют в соответствии со следующей зависимостью: Ть Ти, де К - коэффициент пропор1:(иональности;ЗГ - угол поворота передних колес , определяемый по формуле CvriQ) Yb-O rttcw максимально возможное смещение задних колес относительно траектории движения передних; Ь - база звена. На чертеже изображена принципиальная схема движения звена на пряолинейном участке пути после прохождения поворота при управлении задними колесами реализующая предла гаемый способ. Сигнал, пропорциональный углу поворотаjy, передних колес 1 относительно рамы 2, алгебраически складывают с .сигналом, пропорциональным углу Ч поворота рамы 2. Суммарный сигнал задерживают на время, необходимое- для прохождения .задними колесами 3 :пути запаздывания, равного пути до передних колес 1 и сравнивают его с сигналом, кото рый уже прошел задержку к данному моменту времени. Если сравниваемае сигналы не равны, что соответствует движению транспортного звена по криволинейному участку пути, то. поворачивают задние колеса 3 на уго полученный вычитанием из суммарного угла, послеазадержки сигнала угла поворота рамы 2.Если сргшниваемые. сигналы равны между собой, что сотответствует прямолинейному участку траектории движения передних колес то поворачивают задние колеса 3 в сторону.этого прямолинейного участк траектории. При этом угол .поворота задних Колес 3 относительно рамы 2 регулируют, например, в соответствии с прямопропорциональной зависимостью от угла поворота передних колес 1 относительно рамы 2 с отрицателыйлм коэффициентом пропорциональности, т.е. 1ТПь -КТу1, CD где К - коэффициент пропорциональности. Величина коэффициента пропорциональности определяется, например, к отношение максимально возможного значений угла поворота задних колес 3 относительно рамы 2 к значению угла поворота передних колес, определяемому по формуле Tn ov-ts, максимально возможное смещ ние задних колес 3 относительно траектории движения передних колес 1, U - база звена, равная в этом случае расстоянию от колес 1 до колес 3. ЕСЛИ передние колеса 1 движутся по криволинейному участку поворота или по прямолинейному участку, длина которого меньше пути запаздыва,ния, то результируквдий угол If „-г Ц; -у не углу после задержки 1,,:Ч+-У T.e.vf ,. в этом случае управлени осуществляется как в известном способе, обеспечивая в идеальных условиях точное, а в реальных условиях приблизительное повторение , задними колесами 3 траекторий движения пеЕ)едних колес 1 ( нз-за неточности процесса управления, наличия бокового увода эластичных шин, проскальзывания и юза колес и т.д.). После выхода передних колес 1 на прямолинейный участок поворота эвена на задержку начинает поступать один и тот же сигнал, соответствующий ,-ф+ и наклона этой прямой относительно оси абсцисс и не за- висящей от траектории движения задних колес. После прохождения передними колесами пути, равного пути запаздывания, задние колеса подходят к этому прямолинейному участку с определенным смещением в сторону, допустим максимально возможным С а с задержки начинает поступать сигнал,соответствукмдий углу наклона прямой. Поэтому сравнйваелаае сигналы (поступающий на задержку и снимаемый с задержки равны.Для того, чтобы при дальнейшем движении получившееся смещение задних колес 3 уменьшилось, необходимо и достаточно, чтобы эти колеса все время были повернуты в сторону прямолинейного участка. Наиболее просто это осуществляется путем установки колес вдоль рамы 2. Но в этом случае смещения уменьшаютгся сравнительно медленно для полной их ликвидации требуется прямолинейный участок большой длины. Наиболее быстро уменьшаются смещения, если в этом случае повернуть задние капеса 3 на 4аксимально возможный угол ТэтйоуВ сторону противоположную углу поворота передних колес 1 относительно рамы 2, который в этом случае определяется по формуле (2). При дальнейшем движзнии наиболее просто управлять задними колесами по прямо пропорционсшьной зависимости (1). В этом случае колеса 3 все время направлены в сторону прямолинейного. участка траектории, уменьшаются Ти и То и смещение колес 3 вплоть до :нуля.. Использование предлагаемого способа позволяет улучшить маневрен-; ность большегрузных длиннообразных и многозвенных автопоездов, повысить точность управления задними колесами, повысить безопасность движения и уменьшить помехи, создавае)уые транспортному потоку на дорогах, а также снизить стоимость строительства специальных дорог, предназначенных для их движения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления задними колесами транспортного звена | 1977 |
|
SU683942A1 |
| Способ управления поворотом прицеп-НыХ зВЕНьЕВ АВТОпОЕздА | 1979 |
|
SU844443A1 |
| Устройство для управления поворотом транспортного средства | 1982 |
|
SU1093595A1 |
| Устройство управления движением прицепных звеньев безрельсового транспортного средства | 1984 |
|
SU1318472A1 |
| Устройство для управления поворотом ведомого звена автопоезда | 1985 |
|
SU1311989A1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СОЧЛЕНЁННОГО ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2601077C1 |
| Устройство для управления колесами звеньев автопоезда | 1980 |
|
SU867756A1 |
| Устройство для управления поворотом транспортного средства | 1983 |
|
SU1134454A2 |
| Устройство управления колесами прицепа транспортного средства | 1981 |
|
SU1049322A1 |
| Способ управления транспортным средством | 1976 |
|
SU582130A1 |
1. СПОСОБ УПРАВЛЕНИЯ .ЗАДНИМИ КОЛЕСАМИ ТРАНСПОРТНОГО ЗВЕНА, поворотным относительно его рамы, заключающийся в том, что определяют угол поворота рамы транспортного эвена и угол поворота передних колес относительно рамы, задерживают сигнал, пропорциональный сумме этих углов , на время прохождения задними колесами пути запаздашания,равного расстоянию до передних колес, и поворачивают задние колеса при движении, передних колес по криволинейному участку пути на угол, полученный вы-. читанием из суммарного угла после задержки сигнала угла поворота рамы звена, отличающийся тем, что, с целью улучшения управляемости транспортного звена путем уменьшения рассогласования траекторий движения передних и задних колес звена на прямолинейном участке пути, поворачивают задние колеса в сторону прямолинейного участка траектории движения передних колес при равенстве значений суммарных углов до и после задержки. 2. Способ по п. 1,отличаю щ и и с я тем, что угол поворота задних колес регулируют в соответствии со следующей зависимостью Т .-КТи, где К - коэффициент пропорциональг (Л ности; -у - угол поворота передних колес, с: определяемый по формуле Ги-агс51и -Vflar максимально возможное смещение задних колес относительно .траектории движения 00 передних; L - база звена. 4 СО : ;о
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Рулевое управление прицепных звеньев безрельсового транспортного средства | 1975 |
|
SU554180A1 |
| Способ крашения тканей | 1922 |
|
SU62A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ управления задними колесами транспортного звена | 1977 |
|
SU683942A1 |
| Способ крашения тканей | 1922 |
|
SU62A1 |
