передней тележки при возникновении смещения относительно заданной траектории. Однако в случае отклонения задней тележки от траектории передней (в результате юза, увода эластичных шин, переезда неровностей дорожного полотна) при точном соблю- дении условий управления задней тележкой, изложенных в способе, произойдет резкое и крутое разворачивание колес задней тележки в направлении, противоположном движению транспортного средства, что создаст аварийную ситуацию на дороге, может вызвать занос либо опрокидывание транспортного средства.
Известен способ в котором производится запоминание траектории передней тележки, а направление задней тележки определяют путем непрерывного отслеживания поворота задней тележки относительно рамы на угол /
/Ь arctgfW-arctg
где Х2 - аргумент функции f(x) траектории движения передней тележки транспортного средства, определяющий положение на заданной траектории задней тележки;
6- угол складывания транспортного средства;
L - база транспортного средства до тех пор, пока значение угла
f f Lcos б) arctg совпадет со значением
угла складывания транспортного средства. Рассматриваемый способ обеспечивает при отклонении последовательное, без рывков возвращение задней поворотной тележки на траекторию передней тележки.
Однако необходимость вычисления аргумента Х2 и функций f(x2), f(Lcos д) при оп- ределении, согласно заданному выражению, угла /3 поворота задней тележки относительно рамы транспортного средства усложняет управление транспортным средством и является недостатком данного способа.
Целью изобретения является упрощение управления транспортным средством и повышение эффективности регулирования направления движения его задней поворотной тележки.
Указанная цель достигается тем, что в способе управления транспортным средством, имеющем переднюю и заднюю поворотные тележки, связанные рамой, определяют и запоминают траекторию передней тележки и направляют заднюю тележку по касательной к траектории передней тележки, а направление движения задней тележки определяют путем непрерывного отслеживания поворота задней тележки относительно рамы, согласно предложенному осуществляют одновременный и постоянный контроль значений углов
складывания передней и задней поворотных тележек относительно рамы и корректируют направления движения задней тележки на угол А А 5+Ј-у,
где 6- угол складывания передней поворотной тележки относительно рамы;
угол складывания задней поворотной тележки относительно рамы;
у- угол, характеризующий взаимное
расположение продольной оси передней поворотной тележки и продольной оси задней поворотной тележки,направленной по касательной к траектории передней тележки, до тех пор, пока значение суммы углов
д и/ совпадет со значением угла у.
Универсальность предлагаемого способа заключается в том, что он позволяет определять угол у взаимного расположения продольных осей поворотных тележек
транспортного средства при условии его движения по единой траектории, основываясь на различных методах. Угол у определяется, как сумма значений углов взаимного расположения последовательных элементарных участков заданной траектории, угол у можно определить взяв производную от функции, описывающей заданную траекторию. Предлагаемый способ не требует при отслеживании поворота задней тележки относительно рамы вычисления угла /3 с помощью довольно сложных зависимостей. Данный способ предусматривает непосредственное определение угла ft складывания задней тележки относительно рамы с помощью датчика поворота. Предлагаемый способ предполагает не только постоянное отслеживание поворота задней тележки относительно рамы, но и одновременный, непрерывный контроль текущих значений
углов д и / складывания поворотных тележек относительно рамы. В случае отклонения задней тележки от траектории передней тележки данный способ предусматривает корректировку текущего значения угла
/3 на угол А с целью последовательного и плавного возвращения задней тележки на заданную траекторию.
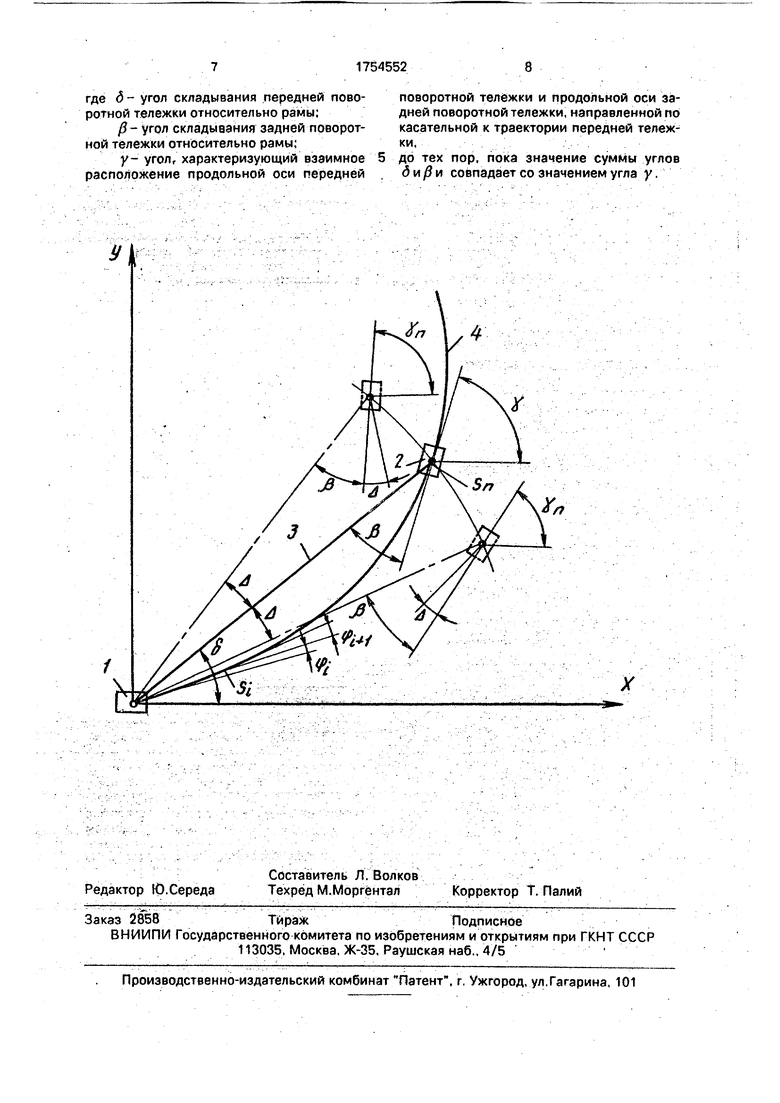
На чертеже представлена кинематическая схема криволинейного движения
транспортного средства по единой траектории и при отклонении задней тележки от заданной траектории.
Транспортное средство имеет переднюю поворотную тележку 1, которая опредег-яет направление движения транспортного средства и заднюю поворотную тележку 2, которая следует по траектории 4 передней тележки, связанных между собой рамой 3. Траектория 4 передней тележки представлена в виде ряда значений углов fi взаимного расположения последовательных элементарных участков Si. Угол у, характеризующий взаимное расположение продольной оси задней поворотной тележки 2 направленный по касательной к траектории 4 вдоль элементарного участка Sn и продольной оси передней поворотной тележки, можно представить как сумму значений углов
У 2 ,(1)
i 1
В то же время угол у можно представить как сумму углов б и /
.(2)
В случае отклонения задней тележки 2 от траектории 4 во внешнюю либо внутреннюю сторону значение угла д соответственно уменьшается либо увеличивается, а значения углов уи/3 по-прежнему удовлетворяют условию (1) положения задней тележки 2 на траектории 4. Равенство в выражении (2) не соблюдается.
Таким образом невыполнение условия (2) свидетельствует об отклонении задней тележки от движения по траектории передней тележки транспортного средства. Поэ- тому на основании результатов исследований, проведенных на выполненной в масштабе 1:10 модели автопоезда модульного типа МАЗ-2000 (Перестройка), установлена следующая зависимость для определения угла корректировки направления движения задней поворотной тележки транспортного средства при ее отклонении от заданной траектории:
Д .(3)
Проиллюстрируем управление транспортным средством по зависимости (3) на двух примерах (фиг. 1).
Положительный знак значения угла корректировки А характеризует наличие смещения задней тележки во внутреннюю сторону от заданной траектории 4. В этом случае первоначальное значение угла возрастает на значение угла А. Происходит разворот задней тележки 2 в направлении к заданной траектории 4.
Отрицательный знак значения угла корректировки А характеризует наличие смещения задней тележки 2 ро внешнюю сторону от заданной траектории 4. Тогда значение угла / уменьшается на значение угла А. И так же, как и в первом случае.
происходит разворот задней тележки 2 в направлении к заданной траектории 4.
Методы практической реализации способа, и в частности определение компонентов. входящих в его основное выражение (3), могут быть различными. Для определения и контроля текущих значений углов б и/ используются датчики поворота, а для опреде- ления угла у и управления задней
поворотной тележкой, кроме датчиков поворота, устройства содержат электрический привод управления задними колесами, включающий запоминающее устройство, считывающие и задающие элементы. По мере движения автопоезда через считывающий элемент в запоминающем устройстпе фиксируется количество поступивших импульсов, сумма которых представляет собой не что иное, как угол у. Сигналы с запомпнающего устройства и датчиков, определяющих текущие значения углов (5и/3, поступают через усилитель на исполнительный механизм, где происходит кбрректи- ровка направления движения задней тележки
на угол А, так что она всегда стремится следовать по траектории передней поворотной тележки транспортного средства.
Технико-экономическая эффективность предлагаемого способа обуславливается
упрощением управления транспортным средством, а значит и повышением надежности его системы управления е целом, повышением маневренности и безопасности движения, обеспечением необходимой курсовой устойчивости транспортного средст- . ва.
Формула изобретения Способ управления транспортным средством, имеющим переднюю и заднюю
поворотные тележки, связанные рамой, заключающийся в том, что измеряют и запоминают траекторию передней тележки и направляют заднюю тележку по касательной к траектории передней тележки, а направление движения задней тележки определяют путем непрерывного отслеживания поворота задней тележки относительно рамы, отличающийся тем, что. с целью упрощения транспортным средством
и повышения эффективности регулирования направления движения задней поворотнойтележки,осуществляют одновременный и постоянный контроль значений углов складывания передней и задней поворотных тележек относительно рамы и корректировку направления движения задней тележки на угол А д+@-у,
где д - угол складывания передней поворотной тележки относительно рамы;
/9- угол складывания задней поворотной тележки относительно рамы;
у- угол, характеризующий взаимное расположение продольной оси передней
поворотной тележки и продольной оси задней поворотной тележки, направленной по касательной к траектории передней тележки,
до тех пор, пока значение суммы углов д и/ и совпадает со значением угла у.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СОЧЛЕНЁННОГО ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2601077C1 |
| Способ управления задними колесами транспортного звена | 1977 |
|
SU683942A1 |
| Способ управления поворотом полуприцепа с блокируемой тележкой и устройство для его осуществления | 1980 |
|
SU925726A1 |
| Устройство для управления угловым положением колесных пар челюстной тележки в железнодорожном пути в зависимости от направления движения | 2022 |
|
RU2783718C1 |
| Способ управления транспортным средством | 1976 |
|
SU582130A1 |
| Способ управления поворотом автотранспортного звена | 1980 |
|
SU979192A1 |
| СПОСОБ МАНЕВРИРОВАНИЯ АВТОПОЕЗДА | 1991 |
|
RU2025370C1 |
| Устройство управления движением прицепных звеньев безрельсового транспортного средства | 1984 |
|
SU1318472A1 |
| Устройство для управления транспорт-НыМ СРЕдСТВОМ | 1978 |
|
SU809076A1 |
| Система рулевого управления колесами прицепного звена автопоезда | 1990 |
|
SU1794781A2 |
У ,4
