(54) УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПЕРЕМЕЩЕНИЙ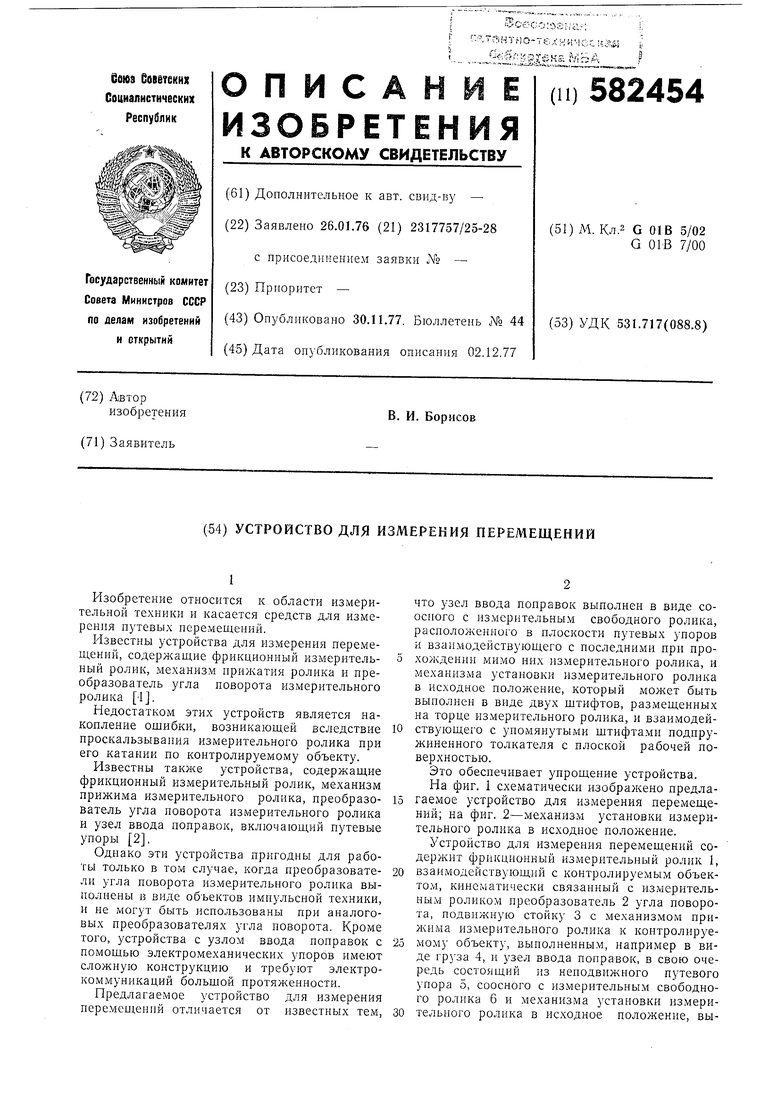
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТ ДЛЯ КОНТРОЛЯ РАЗМЕРОВ БАЛЛОНОВ ЭЛЕКТРОННОЛУЧЕВЫХ ТРУБОК | 1971 |
|
SU296173A1 |
| Загрузочное устройство | 1987 |
|
SU1437184A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ РЕЗЬБ | 1993 |
|
RU2032141C1 |
| Устройство для контроля и сортировки многогранных пластин | 1981 |
|
SU1079309A1 |
| МНОГОПОЗИЦИОННЫЙ ПОЛУАВТОМАТ ДЛЯ КОНТРОЛЯ | 1969 |
|
SU254035A1 |
| Автомат для изготовления плоских спиральных пружин | 1975 |
|
SU536871A1 |
| Устройство для измерения диаметровОТВЕРСТий МЕТОдОМ ОбКАТыВАНия | 1977 |
|
SU796638A1 |
| Планиметр | 1979 |
|
SU896374A1 |
| Устройство для измерения линейных размеров деталей | 1990 |
|
SU1733916A1 |
| Запорное устройство к крышке кожуха для вращающегося узла | 1977 |
|
SU682724A1 |
1
Изобретение относится к области измерительной техники и касается средств для измерения путевых перемещений.
Известны устройства для измерения перемещений, содержащие фрикционный измерительный ролик, механизм прижатия ролика и преобразователь угла поворота измерительного ролика 1 .
Недостатком этих устройств является накопление ошибки, возникающей вследствие проскальзывания измерительного ролика при его катании по контролируемому объекту.
Известны также устройства, содержащие фрикционный измерительный ролик, механизм прижима измерительного ролика, преобразователь угла поворота измерительного ролика и узел ввода поправок, включающий путевые упоры 2,
Однако эти устройства пригодны для работы только в том случае, когда преобразователи угла поворота измерительного ролика выполнены в виде объектов импульсной техники, и не могут быть использованы при аналоговых преобразователях угла поворота. Кроме того, устройства с узлом ввода поправок с помощью электромеханических упоров имеют сложную конструкцию и требуют электрокоммуникаций большой протяженности.
Предлагаемое устройство для измерения перемепгений отличается от известных тем,
что узел ввода поправок выполнен в виде соосного с измерительным свободного ролика, расположенного в плоскости путевых упоров и взаимодействующего с последними при прохождении мимо них измерительного ролика, и механизма установки измерительного ролика в исходное положение, который может быть выполнен в виде двух щтифтов, размещенных на торце измерительного ролика, и взаимодействующего с упомяиутыми щтифтами подпружиненного толкателя с плоской рабочей поверхностью.
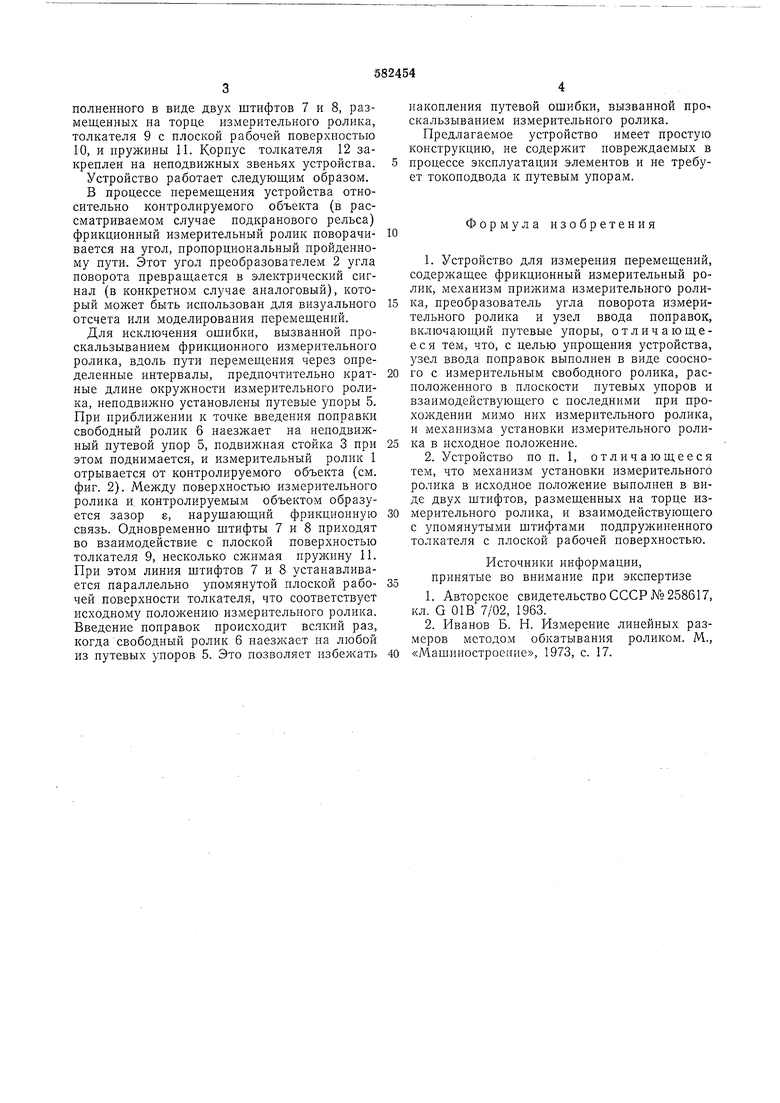
Это обеспечивает упрощение устройства. На фиг. 1 схематически изображено предлагаемое устройство для измерения перемещений; на фиг. 2-механизм установки измерительного ролика Б исходное положение.
Устройство для измерения перемещений содержит фрикционный измерительный ролик I, взаимодействующий с контролируемым объектом, кинематически связанный с измерительным роликом преобразователь 2 угла поворота, подвижную стойку 3 с механизмом прижима измерительного ролика к контролируемому объекту, выполненным, например в виде груза 4, и узел ввода поправок, в свою очередь состоящий из неподвижного путевого упора 5, соосного с измерительным свободного ролика 6 и механизма установки измерительного ролика в исходное положение, выполненного в виде двух штифтов 7 и 8, размещенных иа торце измерительного ролика, толкателя 9 с плоской рабочей поверхностью 10, и пружины И. Кориз-с толкателя 12 закреплен на неподвижных звеньях устройства.
Устройство работает следующим образом.
В процессе перемещения устройства относительно контролируемого объекта (в рассматриваемом случае подкранового рельса) фрикционный измерительный ролик поворачивается на угол, пропорциональный пройденному пути. Этот угол преобразователем 2 угла поворота превращается в электрический сигнал (в конкретном случае аналоговый), который может быть использован для визуального отсчета или моделирования перемещений.
Для исключения ошибки, вызванной проскальзыванием фрикционного измерительного ролика, вдоль пути перемещения через определенные интервалы, предпочтительно кратные длине окружности измерительного ролика, неподвижно установлены путевые упоры 5. При приближении к точке введения поправки свободный ролик 6 наезжает на неподвижиый путевой упор 5, подвижная стойка 3 при этом поднимается, и измерительный ролик 1 отрывается от контролируемого объекта (см. фиг. 2). Между поверхностью измерительного ролика и. контролируемым объектом образуется зазор 8, нарушающий фрикционную связь. Одновременно щтифты 7 и 8 приходят во взаимодействие с плоской поверхностью толкателя 9, несколько сжимая пружину 11. При этом линия штифтов 7 и 8 устанавливается параллельно упомянутой плоской рабочей поверхности толкателя, что соответствует исходному положению измерительного ролика. Введение иоправок происходит всякий раз, когда свободный ролик 6 наезжает иа любой из путевых упоров 5. Это позволяет избежать
накопления путевой ошибки, вызванной проскальзывапием измерительного ролика.
Предлагаемое устройство имеет простую конструкцию, не содержит повреждаемых в процессе эксплуатации элементов и ие требует токоподвода к путевым упорам.
Формула изобретения
Источники информации, принятые во внимание при экспертизе
И
зс
5
k-F
