1
Изобретение относится к области весоизмерительной техники.
Известны устройства для съема и навешивания грузов на подвесном конвейере, содержащие захватывающие, направляющие и перемещающие элементы 1, 2, 3.
Ближайшим к изобретению по технической сущности является устройство, содержащее грузозохватные рычаги, подвижно закрепленные на звездочке цепной нередачи и связанные с копиром перемещения но вертикали 4.
Известное устройство не обеспечивает возможность взвещивания перемещаемых подвесным конвейером грузов.
Для расширения функциональных возможностей предлагаемого устройства опо снабжено весоизмерителем, установленным под звездочкой, п копирами горизоптального перемещения, при этом грузозахватные рычаги установлены с возможностью поворота в горпзонтальной нлоскости.
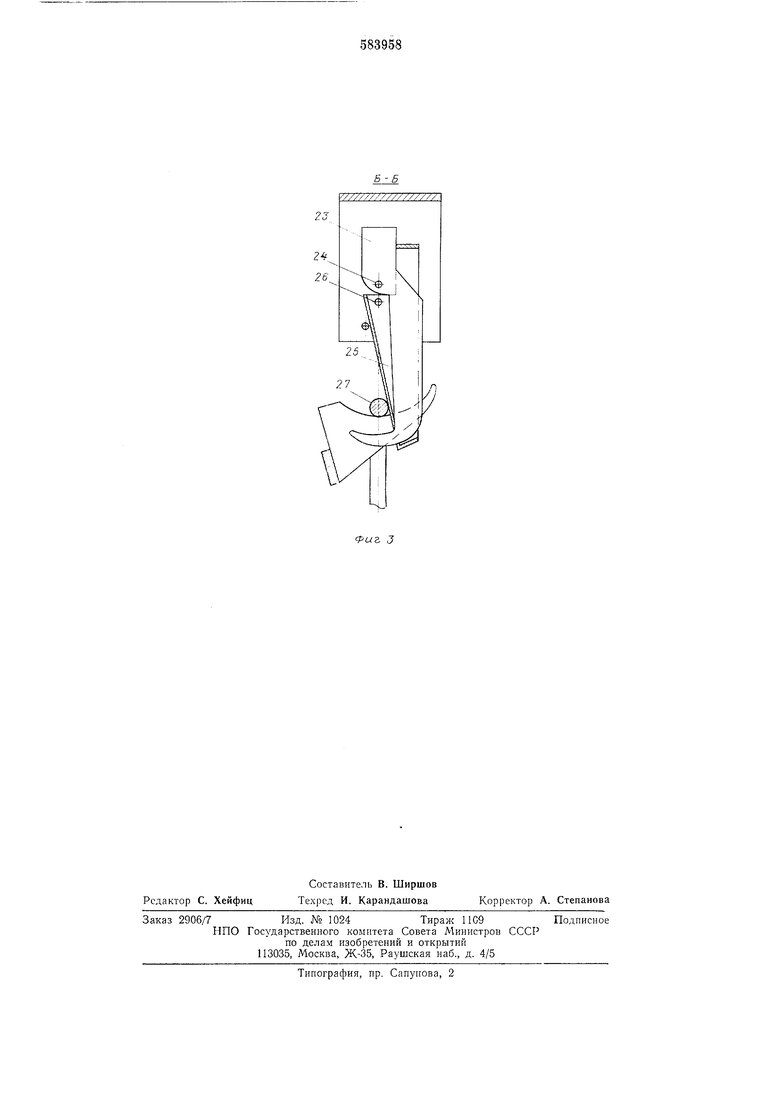
На фиг. 1 изображено описываемое устройство, вид сверху; на фиг. 2 - то же, разрез по А-А на фиг. 1; на фиг. 3 - то же, разрез по Б-Б на фиг. 2.
Грузозахватные рычаги 1 и 2 с вилками 3 и 4 установлены подвижно в вертикальном наиравлении и поворотно относительно свонх вертикальных осей 5 и 6, закрепленных на кронштейнах 7, жестко установленных на поворотной звездочке 8 нодвесного транспортера 9. Для возврата рычагов 1 и 2 в исходное положение они соединены между собой пружипамн 10.
Кронштейны 7 закреплены на звездочке 8 с шаго.м, равным шагу грузовых крюков (на чертеже не показаны) на подвесном транспортере 9. Ролпк И рычага 1 установлен в зоне 1ззаимоде11ств ш с кониром 12 вертикального
пере.мещення рычага 1, а ролик 13 рычага 2 - в зоне взаимодействия с копиром 14 вертикального неремещення рычага 2. Ролик 15 рычага 1 и ролик 16 рычага 2 установлены в зоне взаимоде11ствия с коппрамп 17 и 18 горизонтального отклонения рычагов 1 и 2. На копирах 17 и 18 поворотно установлены направляющне стрелки 19 н 20, связанные с приводом 21. Весопзмеритель 22 установлен под звездочкой 8 н снабжен крюком 23 (фнг. 3),
поворотно установленным на горизонтальной осп 24 н кпнематнческн связанным с двуплечим рычагом 25, установленным па оси 26.
Работает устройство следующи.м образом. Грузозахватный рычат 1 совершает круговое
движение вместе со звездочкой 8 и кронштейном 7 н, взанмоде ствуя ролнком 15 с копиром 17, отклоняется относительно оси 5, заннмая позицию, нрн которой вилка 3 находнтся нод крюком 23 весонзмернтеля 22 с подвешенпым на скобе 27 грузом для взвешиваиия. Затем ролик и, накатываясь па копир 12, иодиимао1 liBopx iKj оси 5 pjjiar 1 с грузом, иодие uicniiuM иа civoCJt; 27. 11р и1од11ятая вверх ско ба 27, совершая движеиие вместе с рычагом 1, нажимает на нижнее плечо рычага 25, иоворачивая его относитеоТыю оси 26, второе плечо которого отклоняет крюк 23 весоизмерителя 22, иоворачивая его вокруг оси 24 и освобождая крюк 23 от груза. Рычаг 1 с грузом продолжает круговое движение и, взаимодействуя роликом 15 с копиром 17, отклоняется, приближаясь вилкой 3 к грузовому крюку на конвейере 9. В момент нахождения вилки 3 пад грузовым крюком коивейера 9 ролик 11, соскальзывая с копира 12, опускает рычаг 1 по оси 5, оставляя скобу 27 с грузом на крюке конвейера.
Грузозахватный рычаг 2 также сове эшает круговое движение вместе со звездочкой 8 и кронштейном 7 и ролик 16, взаимодействуя с копиром 18, отклоняет рычаг 2 относительно вертикальной оси 6 и подводит вилку 4 под грузовой крюк транспортера 9. В это время ролик 13 рычага 2 накатывается на копир 14 и поднимается по оси 6, поднимая вилкой 4 скобу 27 с подвешенным на транспортере 9 грузом.
Продолжая круговое движение и скользя роликом 1G но копиру 18, рычаг 2 занимает ноложение, нри котором его вилка 4 находится над крюком 23 весов 22. В эгом положении рычага 2 ролик 13, скатываясь с конира 14, опускает рычаг 2, ос ав;1иет скобу 27 с грузом на )К)кс 2о iHCDB 22. Да.ice 1-;:;:К 111сп11ыГ1 jpy.; с1111м;и.1Чя pbi-ajoAi 1, :t описано вынк,. н авс 11нвастся па крюк KoiiPeiiepa 9. с которого бы/: снят рычагом 2.
При отсутствии груза на крюке конвейера 9 нанравляюилне стрелки 19 н 20 носредством нри1юда 21 отклонены наружу, н ролики 15 и 16 нрохг);1,ят с jiiiyTpeinicii стороны копирои 17 и 18, НС гпк.юняя рыча1л 1 н 2.
Фор м у л а и 3 о б р с г е н и я
Устройство для съема и навешивания грузов на нодвесном конвейере, содержащее грузозахватные рычаги, нодвижно закрепленные на звездочке иепной нсрсдачн н связанные с копиром неремеп1ения но вертикали, отличающееся тем, что, с целью расширения его функциональных возможностей, оно снабжено весонзмерптелсл, установленным под звездочкой, и копирами горизонтального перемещения, прп этом грузозохватные рычаги установлены с возможностью поворота в горизонтальной плоскости.
Псгочники информации,
принятые во внимание нри экспертизе
1.Авторское свидетельство Ло 150261, М. Кл.2 G 01G 11/06, 1961.
2.Авторское свпдетсл зство Л1 392353, М. Кл. G 01G 17/06, 1970.
3.Патент ПНР ЛУ 57097, кл. 12f, 28, 1969.
4.Авторское свидетельство „Yc. -107808, М. Кл.2 В G5G 17/52, 1971.
12
J7
| название | год | авторы | номер документа |
|---|---|---|---|
| Кран для погрузочно-разгрузочныхОпЕРАций HA пОдВЕСНОМ КОНВЕйЕРЕ | 1979 |
|
SU806587A1 |
| Устройство для перегрузки подвесок с траверс подвесного конвейера | 1981 |
|
SU1004227A1 |
| Устройство для перемещения и передачи подвесок с грузами | 1983 |
|
SU1133194A1 |
| ЙСЕСОЮЗНАЯ ЗаявительКавказский филиал Центрального научно-исследовательскогЬ^'' р., ' ^ ' __ ^' и проектно-конструкторского института механизации и энерreiyjtH _'51 "^'"^'^^^^^'•'^ ^ лесной промышленности-—~—— | 1973 |
|
SU391955A1 |
| ГРУЗОЗАХВАТНОЕ ПРИСПОСОБЛЕНИЕ | 1971 |
|
SU290528A1 |
| Кран мостового типа для погрузочно-разгрузочных операций на подвесном конвейере | 1983 |
|
SU1098901A1 |
| ПОДВЕСНОЙ НЕСУЩЕ-ТОЛКАЮЩИЙ КОНВЕЙЕР | 1965 |
|
SU167771A1 |
| УСТРОЙСТВО для ПЕРЕГРУЗКИ ИЗДЕЛИЙ | 1965 |
|
SU174989A1 |
| ГРУЗОЗАХВАТНАЯ ТРАВЕРСА | 1971 |
|
SU412112A1 |
| Секционный конвейер | 1979 |
|
SU947007A1 |

Фаг. 2
