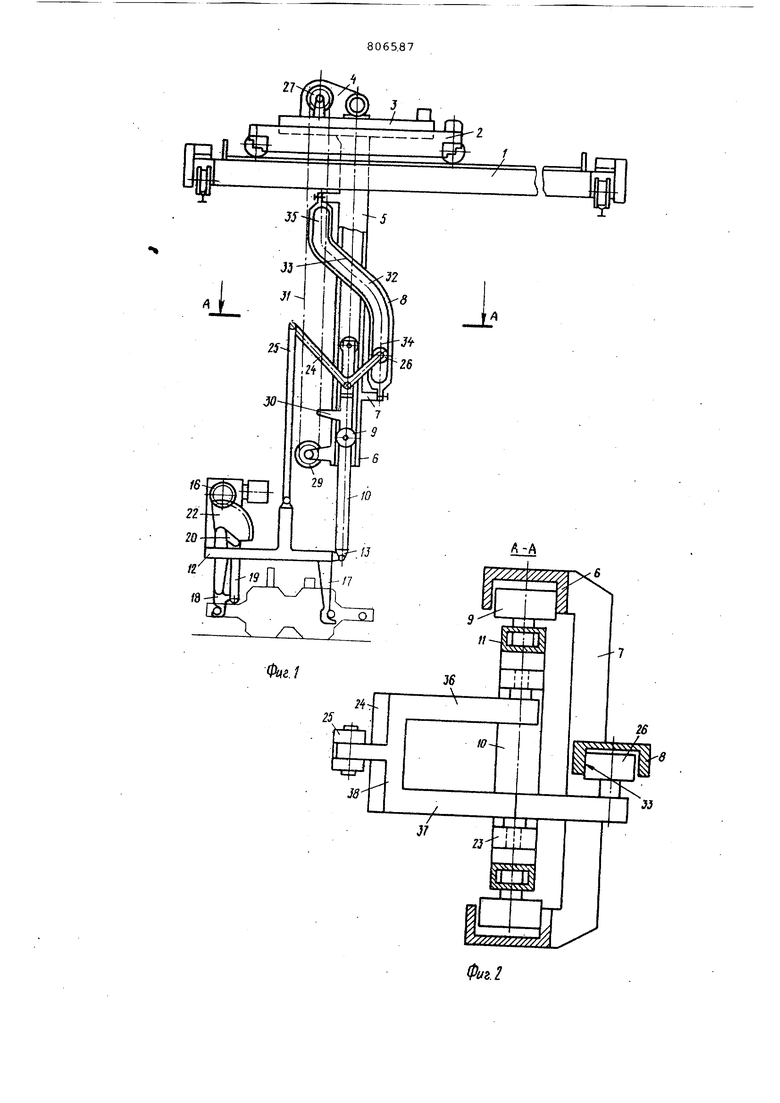
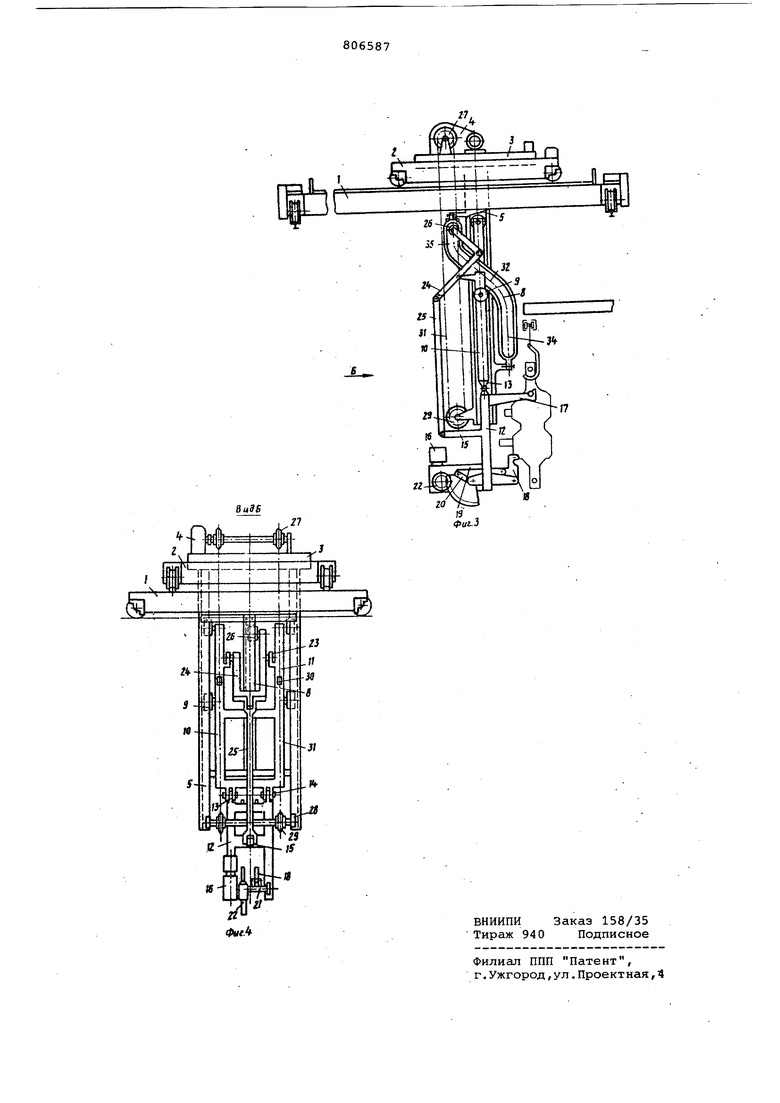
Изобретение относится к подъемно транспортной технике, а именно к устройствам для подъема громоздких изделий с целью их транспортировки и погрузки или выгрузки, и может быть также отнесено к погрузрчно-разгрузочным устройствам подвесных кОнвейе Известен кран для погрузочноразгрузочных операций на подвесном конвейере, содержащий установленный на ходовых путях приводной мост, несущий грузовую тележку с поворотной вокруг вертикальной оси платформой с механизмом подъема, прикреппенную к платформе вертикальную колонну, на которой установлена подвижная вдоль нее и связанная с механизмом подъема каретка с захватным органом Ij . Недостатком известного устройства является то, что при его использовании затруднено, а в ряде случаев невозможно захватывание изделий и их навешивание на подвесной конвейер в особенности изделий сложной форш например кустов отливок, или снятие изделий с подвесного конвейера и упорядоченная укладка в нужном мест Цель изобретения - повышение эф.фективности в работе. Эта цель достигается тем, что захватный орган состоит из поворотной вокруг горизонтальной оси от привода грузовой платформы, снабженной обращенными в противоположные стороны крюками, одни из которых закреплены неподвижно, а другие - шарнирно и снабжены индивидуальным приводом, при этом привод поворота платформы установлен на каретке. При этом привод поворота грузовой платформы содержит двуплечий рычаг, одно плечо которого связано тягой с грузовой платформой, а на другом установлен ролик, и закрепленную на колонне копирную направляющую для упомянутого ролика, при этом каретка выполнена с проемом для установки двуплечего рычага и вхождения копира, а двуплечий рычаг имеет вырез для копира. На фиг. 1 изображен кран при захватывании изделтя, общий вид; на фиг. 2 - разрез А-А на фиг-. 1; на фиг. 3 - кран при навешивании иэлеЛИЯ на подвесной конвейер, общий вид, на фиг, 4 - вид Б на фиг. 3, Кран содержит установленный на ездовых путях приводной мост 1, несущий подвижную вдоль моста приводную грузовую тележку 2 с установленной на ней поворотной вокруг вертикгшь ной оси приводной платформой 3. На поворотной платформе 3 установлен механизм подъема 4, а снизу к пово ротной платформе прикреплена верти кальная колонна 5, состоящая из вер тикальных направляющих 6, соединенных между собой перемычками 7, на которых закреплена неподвижно копир ная направляющая 8, Вертикальные н правляющие б колонны 5 удерживают катки 9 каретки 10. Последняя выполнена в виде прямоугольной рамки вертикальные стороны которой продлены ввер:.; и образуют консоли 11, на которых с внешней стороны установлены катки 9, Снизу к каретке 10 присоединена грузозахватная платформа 12 при помощи шарниров 13, которая имеет воз можность враща ться вокруг горизонтальной оси 14. На грузозахватной платформе 12 встановлены кронштейн и привод 16. С противоположной стороны установлены неподвижные крюки 17 и поворотные крюки 18. Поворотные крюки 18 при помощи тяг 19, рычагов 20, вала 21 и зубчатой переда чи 22 соединены с приводом 1G. С внутренней стороны консолей 11 каретки 10 образуется проем, внутри которого в поди.ипниках 23 установле двуплечий рычаг 24, плечи которого расположены под прямым углом. Одно плечо рычага 24 соединено шарнирно жесткой тягой 25 с кронштейном 15 грузозахватной платформы 12. На дру гом плече рычага 24 установлен роли 26, который охватывается копиром 8 фиг. 2. На выходном валу механизма 4 подъема установлены две приводные звездочки 27. В нижней части колонн 5 в подшипниках 28 установлены две холостые звездочки 29. На каретке 10 установлены два кронштейна 30, к которым прикреплены звенья замкнутых цепей 31, огибающих приводные звездочки 27 и холостые звездочки 29. Копирн я направляющая 8 имеет наклонный участок 32, в пределах ко торого опорные поверхности 33 распо ложены под острым углом к направлению движения каретки 10 и два участ ка 34 и 35, параллельные направлению движения каретки 10. Наклонный участок 32 соединен с участками 34 и 35 плавными переходами. Рычаг 24 состоит из двух боковин 36и 37, соединенных между собой пе ремычкой 38. Между боковинами 36 и 37образуется вырез с шириной, дост точной для вхождения в него копирной направляющей 8. Кран работает следующим образом. Приводной мост 1, перемещаясь по ездовым путям, и тележка 2, пере мещаясь по мосту 1, подводят грузозахватную платформу 12 к месту расположения изделия, а поворотная платформа 3, вращаясь вокруг вертикальной оси, обеспечивает ей необходимое угловое положение. Каретка 10, перемещаясь катками 9 в направляющих 6 колонны 5, опускается механизмом 4 подъема при помощи цепей 31 на такую высоту, чтобы ролик 26 рычага 24 находился на вертикальном участке 34 копирной направляющей 8. При этом грузозахватная платформа 12 при помощи тяги 25 и рычага 24 приобретает горизонтальное положение, которое она сохраняет в интервале высот, равном длине участка 34. В этом интервале высот производится захватывание изделия. Перед захватыванием изделия поворотные крюки 18 приводом 16 при помощи тяг 19, рычагов 20, вала 21 и зубчатой передачи 22 отклоняются вовнутрь на фиг. 1 - поворот против часовой стрелки).. При захватывании изделия неподвил-ные крюки 17 путем передвижения моста 1, тележки 2 и каретки 10 подводятся под выступающие части изделия (при погрузке, например кустов отливок - под питатели литниковой системы). После утого поворотные крюки 18 поворачиваются приводом 16 во внешнем направлении (фиг. 1 по часовой стрелке) и захватывают другие выступающие части изделия. После захватывания изделия крюками каретка 10 с грузозахватной платформой 12 и изделием поднимается в вверх механизмом 4 подъема при помощи цепей 31. При этом ролик 26 рычага 24, перейдя с участка 34 на наклонный участок 32, в процессе движения каретки вверх поворачивает рычаг в под111ипниках 23, который в свою очередь, при помощи тяги 25 поворачивает грузозахватную платформу вместе с изделием. При переходе ролика 26 на участок 35 вращение рычага 24 прекращается, а грузозахватная платформа 12 и удерживаемое ее крюками 17 и 18 изделие приобретают вертикальное положение (фиг. 3). Такое положение сохраняется в интервале высот, равном длине участка 36. В этом интервале производится навешивание изделий на крюки подвесного конвейера.. При навешивании изделия, путем подъема каретки 10 при помощи механизма подъема 4 и путем вращения поворотной платформы 3 вокруг вертикальной оси, изделию обеспечивается необходимое высотное и угловое положение относительно крюков подвесного конвейера. Затем путем перемещения моста 1 и тележки 2 соответствуюие выступающие части изделия завоятся в зев крюка подвесного конвейера. После этого поворотные крюки 18 поворачиваются приводом 16 и освобождают выступающие части изделия, которые они удерживали. Затем производится опускание каретки 10, в результате чего изделие зависает на крюках конвейера, а неподвижные крюки 17 грузозахватной платформа 12 освобождаются. После этого неподвижные крюки 17 выводятся из-под конвейера путем перемещения тележки 2 1ПО мосту 1 и начинается новый цикл погрузки.
Операция по съему изделия с подвесного конвейера и укладке его в нужном месте производятся в порядке обратном вышеописанному.
Использование изобретения позволяет производить подачу изделий из предшествующей технологической операции и навешивание их на подвесной конвейер без применения дополнительных специальных устройств для навешивания изделий на подвесной конвейер, избежать промежуточной операции по точной, ориентированной укладке изделий на такое устройство, а при использовании его для схемы изделий с подвесного конвейера позволяет производить съем изделий, их транспортировку и уклгщку в нужном месте, например на последующую технологическую- операцию, без применения дополнительных специальных разгрузочных устройств.
Формула изобретения.
1. Кран для псгрузочно-разгрузочных операций на подвесном конвейере
содержащий установленный на ходовых путях приводной мост, несущий грузовую тележку с поворотной вокруг вертикальной оси плтформой с механизмом подъема, прикрепленную f к платформе вертикальную колонну, на которой установлена подвижная вдоль нее и связанная с механизмом подъема каретка с захватным органом, отли чающийся тем, что, с целью повышения эффективности в работе, захватный орган состоит из поворотной вокруг горизонтальной оси от Привода грузовой платформы, снабженной обращенными в противоположные стороны крюками, одни из которых 5 закреплены неподвижно, а другие шарнирно и снабжены индивидуальным приводом, при этом привод поворота платформы установлен на каретке.
02. Кран по п. 1, о т л и ч а ющ и и с я тем, что привод поворота грузовой платформы содержит двуплечий рычаг, одно плечо которого связано с грузовой платформой, а на
5 другом установлен ролик, и закрепленную на колонне копирную направляющую для упомянутого ролика, при этом каретка выполнена .с проемом для установки двуплечего рычага и вхождения копира,, а двуплечий рычаг
0
имеет вырез для копира.
Источники информации, принятые во внимание п. и экспертизе 1. Зерцалов А. И. и Певзнер Б.И.
5 Краны-штабелеры. М., Машиностроение, 1974, с. 31 прототип .

| название | год | авторы | номер документа |
|---|---|---|---|
| Кран мостового типа для погрузочно-разгрузочных операций на подвесном конвейере | 1983 |
|
SU1098901A1 |
| Устройство для навешивания изделий на подвесной конвейер | 1982 |
|
SU1006341A1 |
| Подвесной грузонесущий конвейер | 1984 |
|
SU1207912A1 |
| Устройство для съема и навешивания грузов на подвесном конвейере | 1976 |
|
SU583958A1 |
| Устройство для перемещения и передачи подвесок с грузами | 1983 |
|
SU1133194A1 |
| Устройство для навешивания и съемаиздЕлий | 1979 |
|
SU806566A1 |
| Устройство для перемещения и навешивания изделий | 1985 |
|
SU1273314A1 |
| Устройство для загрузки подвесного конвейера | 1983 |
|
SU1152894A1 |
| Подъемное устройство | 1985 |
|
SU1384525A1 |
| Подвесной грузонесущий конвейер | 1975 |
|
SU580147A1 |